
Fターム[5C122FH04]の内容
Fターム[5C122FH04]に分類される特許
141 - 160 / 1,114
画像処理装置、画像処理方法及びプログラム
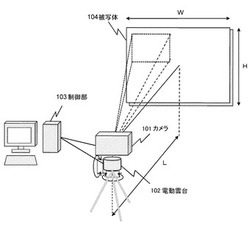
【課題】撮像手段の位置を正しく推定し、好適な画像データの結合結果を得ることにある。
【解決手段】制御部103は、カメラ101を移動させつつ、撮像処理を複数回実行させる。制御部103は、カメラ101により撮像された複数の画像データ間の重複領域を評価し、その評価結果に基づいて、複数の画像データの夫々に対応するカメラ101の位置を推定する。そして、制御部103は、推定してカメラ101の各位置に基づいて、複数の画像データの結合処理を実行する。
(もっと読む)
画像処理装置及びプログラム

【課題】より簡易な取扱いとしながら、正しい状態のドキュメント画像を出力する。
【解決手段】ドキュメントを載置する上面に所定のマーク(RM)が付加された書画台と、書画台の上面を撮影する撮影系21〜27と、撮影系21〜27での撮影により取得した画像データ中のマーク(RM)の画像の存在の有無を判定し、その判定結果に応じて撮影系21〜27での撮影により取得した画像データ中のドキュメント部分を90°回転した画像データを出力する制御部31とを備える。
(もっと読む)
撮像装置及び電子機器
【課題】並進ぶれ補正及び回転ぶれ補正の強度バランスを良好化する。
【解決手段】ぶれ量算出部20において、ヨー方向又はピッチ方向のぶれである並進ぶれを検出すると共にロール方向のぶれである回転ぶれを検出し、画像処理部15において、並進ぶれ及び回転ぶれを画像処理によって補正する。画像処理部15は、回転ぶれに対する補正強度を並進ぶれに対する補正強度よりも弱く設定する。例えば、並進ぶれの積算量が基準量TH1を超えるまで並進ぶれに対する補正を停止する第1コアリング制御と、回転ぶれの積算量が基準量TH2を超えるまで回転ぶれに対する補正を停止する第2コアリング制御とを実施し、基準量TH2を基準量TH1よりも大きく設定することで、回転ぶれ補正を並進ぶれ補正よりも働きにくくする。即ち、回転ぶれに対する補正強度を並進ぶれに対する補正強度よりも弱くする。
(もっと読む)
携帯電子機器
【課題】消費電力を抑制しつつ、多様な撮像モードを設定できる携帯電子機器を提供すること。
【解決手段】撮像制御部453は、第1撮像部46、第2撮像部47及び照度センサ49から出力される露出出力信号が閾値よりも大きい場合には、第1撮像部46及び第2撮像部47により立体画像を撮像する第1撮像モードに撮像モード設定部451を設定させる。一方、撮像制御部453は、第1撮像部46、第2撮像部47及び照度センサ49から出力される露出出力信号が閾値以下の場合には、第1撮像部46及び第2撮像部47により2次元画像を撮像する第2撮像モードに撮像モード設定部451を設定させる。
(もっと読む)
物体追尾装置、物体追尾方法、及び物体追尾プログラム
【課題】追尾対象である被写体などの物体の状態(形状)が変化した場合においても、精度よく被写体の追尾を行う。
【解決手段】物体追尾装置は、複数のフレーム画像を有する画像信号を受けて、当該画像信号において特定の物体を追尾する。小領域設定部104は現フレーム画像よりも前の前フレーム画像において物体の領域を示す物体領域に予め設定された数の小領域を設定する。動きベクトル検出部105は小領域の各々において物体について動きベクトルを検出し、形状変化判断部106は動きベクトルに応じて物体の変化を判断して形状変化情報を得る。領域補正部107は形状変化情報に応じて物体領域の位置及びサイズを補正して補正物体領域とする。そして、追尾部102は補正物体領域によって物体の追尾を行う。
(もっと読む)
撮像装置
【課題】ユーザに興趣を与える画像をライブビュー表示する撮像装置を提供する。
【解決手段】画像データの一部から万華鏡状画像データを生成する万華鏡状画像生成部(310)を備え、制御部(300)は、ライブビュー表示において、被写体検出部が被写体を検出したときに、当該被写体を用いて生成した万華鏡状画像をライブビュー表示と共に表示部(132)に表示する第1表示モードと、前記被写体検出部が被写体を検出しないときに、万華鏡状画像を表示部(132)に表示しない第2表示モードと、を切り換える。
(もっと読む)
溶接状況監視方法及び溶接状況監視装置
【課題】撮像手段の設置位置が不明な状況下でも、溶接状況を監視できるようにする。
【解決手段】本発明では、少なくとも撮像手段16の設置位置が不明な状況下で溶接ロボット1の先端部12aを撮像し、当該先端部12aが写り込んだ画像を取得する。画像上における先端部12aの位置である撮像先端部位置fPと、溶接ロボット1の先端部12aの位置である実先端部位置rPとを取得する。撮像先端部位置fPと実先端部位置rPとの関係を示す変換パラメータ(xc,yc,zc,αc,βc,γc)を求める。求めた変換パラメータ(xc,yc,zc,αc,βc,γc)を用いて、実先端部位置rPとカメラ座標で表現されたロボット先端部位置cPとを関係づける変換マトリックスcrTを求め、この変換マトリックスcrTを用いて、光軸がロボット先端を向くように撮像手段16を動かして溶接状況を監視する。
(もっと読む)
検知装置、及び、検知方法
【課題】カメラが撮影した車外画像のみに基づいてカメラの位置ズレを簡易に検知できる技術を提供する。
【解決手段】カメラが撮影した時間的に連続する複数の車外画像の夫々に含まれる他の車両の像に基づいて、他の車両の停車を判断するため、検知装置はその停止を車外画像のみで簡易に判断することができる。更に、他の車両の停車を判断した場合に、導出した車外画像中の他の車両の像の停止位置と基準停止位置とを比較した結果に基づいてカメラの光軸の位置ズレを検知するため、検知装置は車外画像のみに基づいてその位置ズレを簡易に検知することができる。
(もっと読む)
映像信号処理装置及びカメラ装置
【課題】視聴者に見やすい映像を表示することができる映像信号処理装置及びカメラ装置を提供する。
【解決手段】映像信号処理装置10は、映像信号処理回路113が出力するスーパーハイビジョン規格の映像信号を、映像切出位置演算部13から入力する切出位置信号に基づいて切り出す映像切出部11と、スーパーハイビジョン規格の映像信号をハイビジョン規格の映像信号に変換してビューファインダ118に出力するダウンコンバータ12と、加速度センサ117から加速度信号を入力するとともに、焦点距離センサ123から焦点距離信号を入力し、カメラヘッド100の加速度が加速度閾値を超えた場合や、ズームレンズ121の焦点距離の変更速度が変更速度閾値を超えた場合に、加速度や変更速度が適正となるよう、映像切出部11に映像を切り出させる映像切出位置演算部13と、を備える。
(もっと読む)
撮像装置、画像処理装置、および画像処理方法、並びにプログラム
【課題】複数の異なる画像補正を確実に、効率的に実現する構成を提供する。
【解決手段】撮像画像に対する様々な異なる補正処理、具体的には、ズーム倍率補正、歪曲収差補正、回転手振れ補正、平行手振れ補正、光軸中心補正、視差補正、これらの補正を全て確実に実行する。また、これらの補正処理を一括して実行して効率的な処理を実現する。特に2つの異なる視点からの2つの画像を撮影するステレオカメラにおいて必要となるズーム倍率補正、光軸中心補正、視差補正についても、2つの撮像部の撮影画像の少なくともいずれかを補正することで品質の高い3D画像を提供する。各補正に適用する補正ベクトルを統合した統合補正ベクトルを算出して補正することで効率的な補正が実現される。
(もっと読む)
画像補正方法、および関連する画像補正システム
【課題】魚眼レンズまたは超広角レンズのカメラで撮影した画像について、画像の幾何学的な歪みを軽減し、ユーザの要求に幾何学的に合わせるように補正する。また、メモリ割り当て技術によって画像補正計算の処理性能をさらに向上させる。
【解決手段】補正画像を同じサイズをもつ複数の補正ピクセルブロックに分割し、補正ピクセルブロックを補間計算で処理することにより、各補正ピクセルブロックのそれぞれにある各ピクセルのピクセル値を1つずつ生成する。
(もっと読む)
二次元画像の透視変換
【課題】埋め込まれたデバイスで透視変換を行なう。
【解決手段】埋め込まれたデバイスは、目的画像選択機構と、変換機構とを含む。変換機構は、目的画像に透視変換関数を適用して、目的画像を、目的画像の前景の視点における、より大きい幅から、目的画像の消失点へ向かって、より小さい幅へ変化させ、かつ目的画像を、目的画像の前景の視点における、より大きい拡張量およびより小さい圧縮量から、目的画像の消失点へ向かって、より小さい拡張量およびより大きい圧縮量へ変化させる。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
カメラ、画像記録プログラムおよび画像表示プログラム
【課題】被写体像を完全に正立させて表示できるカメラ、画像記録プログラムおよび画像表示プログラムを提供する。
【解決手段】CPU12は、傾斜センサー14でから出力された信号値に基づいて、撮像素子2で被写体像が撮像されたときのカメラボディ100の傾斜角度θを算出し、カメラボディ100の90度毎の縦横の向きを判定する。CPU12は、傾斜角度θと、判定したカメラボディ100の90度毎の縦横の向きとの角度差△θを算出する。この角度差△θは、EXIF規格で規定された、各ベンダー(メーカー)が任意に使用できる領域に記録される。記録された画像データを再生する際、CPU12は、カメラボディ100の90度毎の縦横の向きと、角度差△θとに基づいて、画像データを回転させて、表示装置9に表示させる。
(もっと読む)
撮像装置及びその制御方法
【課題】複数の照明手段を不要にするとともに処理負荷を抑えて、望ましい陰影を持つ被写体写真を得ることができるようにする。
【解決手段】被写体を撮像して画像信号を生成し、前記撮像された被写体の主要要素を検知する。そして、予め記憶されている互いに異なる方向からの光線に対する複数の陰影パターンのうち、ユーザーにより指定された陰影パターンの位置及び形状を、前記検知された被写体の主要要素の位置に基づいて変更し、前記変更された陰影パターンが前記被写体と重なるように前記画像信号に係る画像を合成し、前記合成した画像を表示するようにして、望ましい陰影を持つ写真が得られるようにする。
(もっと読む)
サムネイル表示装置
【課題】パノラマ画像であっても、視認性の良いサムネイルを生成・表示可能なサムネイル表示装置を提供する。
【解決手段】パノラマ画像判別部107によって画像が通常の画像かパノラマ画像かを判別し、パノラマ画像の場合にはサムネイル処理部105は3D画像のサムネイルを生成し、そうでない場合にはサムネイル処理部105は通常サムネイルを生成する。表示制御部104は、通常サムネイルとともに3D画像のサムネイルを一覧表示をするとき、3D画像のサムネイルを回転させながら表示することができる。
(もっと読む)
撮像装置
【課題】 画角も中心もことなる二つの種類の画像を同時撮影可能な撮像装置で、撮影を行う場合、2つフレーミングを撮影者が同時に行うことは実質不可能である。
【解決手段】 広角の画角は撮像装置の光軸中心を中心としたフレーミングで撮影し、望遠画角の撮影の中心は、予め設定したフレーミング内に入った被写体を認識し、次以降の撮影にも反映する。撮像装置の光学中心を大きく変更する場合は、加速度センサの出力も併用し予測演算に加算する。
(もっと読む)
画像補正装置、補正画像生成方法、補正テーブル生成装置、補正テーブル生成方法、補正テーブル生成プログラムおよび補正画像生成プログラム
【課題】補正後の画像における違和感を低減ないし解消することを課題とする。
【解決手段】前記課題を解決するために、本発明の画像補正装置10は、入力画像を補正テーブル17に基づいて幾何補正する幾何補正部13を備え、補正テーブル17は、出力画像上の各画素位置に対応する被写体空間中の光線方向ベクトルを、被写体空間中における前記入力画像の投影中心位置である第1の投影中心位置よりも前記入力画像に対応する光軸の方向に関して後方に位置する第2の投影中心位置に基づいて算出し、前記光線方向ベクトルに基づき、前記画素位置に対応する被写体空間中の対応点が前記第1の投影中心位置からどの方向に存在するかを表すベクトルである原点基準光線方向ベクトルを算出し、前記原点基準光線方向ベクトルに対応する前記入力画像上の位置を抽出位置として算出し、前記抽出位置を前記出力画像の画素位置に対応付けていることを特徴とする。
(もっと読む)
画像処理装置及び撮像装置
【課題】 直感的に素早く、画像処理パラメータを設定することを目的とする。
【解決手段】 画像に対する画像処理を実行する画像処理部と、自装置の少なくとも一部の姿勢の変化を検出する検出部と、前記検出部により検出された前記姿勢の変化に基づいて、前記画像処理部における画像処理条件を設定する設定部とを備える画像処理装置。
(もっと読む)
撮像装置およびその制御方法
【課題】 ライブビュー撮影時に、画像は傾いていないにもかかわらず、撮像装置が傾いているために、撮像画像に意図しない傾き補正をかけてしまうことがあった。
【解決手段】 被写体像を画像データに変換する撮像素子と、装置の傾きを検出する傾き検出手段と、画像データおよび傾きを表示する表示部と、画像データに対して傾きを補正する傾き補正手段と、傾き補正に用いるための任意の角度情報を受け付ける制御手段とを有し、傾き補正手段は、撮影動作が行われると、受け付けた角度情報に基づいて画像データに対して傾きを補正する。
(もっと読む)
141 - 160 / 1,114
[ Back to top ]