
Fターム[5C122FH11]の内容
Fターム[5C122FH11]の下位に属するFターム
動き検出/動きベクトル検出 (2,089)
Fターム[5C122FH11]に分類される特許
221 - 240 / 2,971
撮像装置、画像処理装置およびその方法
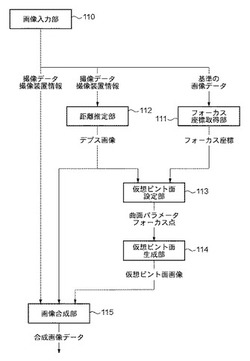
【課題】 異なる撮影位置から被写体を撮影した複数の画像データから任意のピント面にフォーカスを合わせた画像データを生成する。
【解決手段】 画像入力部110は、異なる撮影位置から被写体を撮影した複数の画像データ、および、撮影位置を示す情報を入力する。フォーカス座標取得部111は、複数の画像データの一つが表す画像におけるフォーカスを合わせる位置を示す少なくも一つのフォーカス座標を取得する。距離推定部112は、複数の画像データおよび撮影位置を示す情報から被写体の撮影距離を推定する。仮想ピント面生成部114は、フォーカス座標および撮影距離からピント面を示す情報を生成する。画像合成部115は、撮影位置を示す情報およびピント面を示す情報に基づき複数の画像データを合成して、ピント面にフォーカスを合せた画像データを生成する。
(もっと読む)
撮像装置

【課題】温度が低い場合でも、光学ファインダーを覗いたまま、顔検出を正確に行うことができるようにする。
【解決手段】撮像装置は、温度を検出する温度検出手段39と、被写体像を観察する光学ファインダー16と、被写体像の光を用いて被写体像中の顔を検出する顔検出手段15と、被写体像中に所定の表示を行う液晶表示部40と、制御手段42を有する。制御手段は、顔検出手段による被写体像中の顔の検出の開始時、液晶表示部の液晶を非表示状態とし、非表示状態にした後に顔検出手段により行われる顔検出の終了時、液晶表示部の液晶を表示状態にもたらすように制御する。制御手段は、温度検出手段で検出された温度が所定の温度よりも低い場合には、液晶表示部を非表示状態にした後、所定の時間が経過した後に、顔検出手段による顔検出を行わせる。
(もっと読む)
撮影装置および方法、画像再生装置および方法、プログラム、並びに記録媒体
【課題】記録された画像の再生の要否をより自由に決めることができるようにする。
【解決手段】撮影した動画像の画像データを生成する画像データ生成部と、センサから出力される検知信号に基づいて、前記生成された画像データが動画像として再生される場合のタイムラインに対応づけられたセンサ信号を生成するセンサ信号生成部と、前記画像データ、および前記センサ信号をデジタルデータ化したセンサデータを同一の記録媒体に記録する記録部とを備える。
(もっと読む)
撮像装置及び撮像方法
【課題】複数の撮像部を有し、各撮像部がそれぞれ撮影を行うことで、異なる複数視点からの撮影画像を取得し、各撮影画像を合成することで、撮影時に設定したフォーカス距離とは異なるフォーカス距離の画像を生成できるようになっている多眼カメラにおいて、重要被写体がある距離を合成フォーカス距離とした場合の超解像可能性を上げる。
【解決手段】異なる複数視点からの撮影を行う複数の撮像手段と、前記撮像手段により撮像された画像から重要被写体を抽出する抽出手段と、前記抽出された重要被写体に対する超解像可能性を算出する算出手段と、前記算出された超解像可能性に応じて、撮像パラメータを調整する調整手段とを備える。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】 複数の視点から撮像した撮像画像データに基づいて合成画像を生成する際に、合焦する領域がぼけてしまうのを抑制し、該合焦する領域外のぼけた領域の画質を向上させることを目的とする。
【解決手段】 領域ごとの合焦の状態を示す合焦状態情報に基づいて、撮像画像データと補間画像データとに対する重み係数を領域ごとに設定し、その重み係数に基づいて、撮像画像データと補間画像データとを合成する。合焦する領域における補間画像データに対する重み係数は、合焦する領域以外の領域の中の少なくとも一部の領域における補間画像データに対する重み係数よりも小さい。
(もっと読む)
映像表示装置、撮影装置、映像システム、表示方法、情報読取方法およびプログラム
【課題】特別なハードウェアがなくても、画像の取得時に画像とは別のデータを取得することが可能な映像システムを提供する。
【解決手段】CPU11は、映像信号に応じた映像を形成するドットが重畳用データに応じて点滅するように、映像信号を補正して、映像に重畳用データが重畳された重畳映像を示す重畳映像信号を生成する。映像表示部12は、重畳映像信号が示す重畳映像を表示する。
(もっと読む)
ロボット装置及びロボット装置の制御方法、コンピューター・プログラム、並びにプログラム記憶媒体
【課題】カメラのレンズの汚れと傷、及び、ハンドの汚れと傷の違いを好適に検出することができる、優れたロボット装置を提供する。
【解決手段】ロボット装置100は、ハンドをカメラ305で撮像した画像をリファレンス画像として、汚れ又は傷が存在する部位を検出する。さらにハンドを移動させることで、検出された汚れや傷がカメラ305のレンズ又はハンドのいずれに起因するかを判定する。そして、ロボット装置100は、検出したのが汚れと仮定して、清掃作業を行なった後、汚れを除去できたかどうかで汚れと傷の違いを検出する。
(もっと読む)
電子カメラ、通信システム
【課題】 本発明は、ライフログ情報のデータ量を抑制して、そのライフログ情報を他者と共有できる手段を提供する。
【解決手段】 電子カメラは、撮像素子、音声入力部、記録処理部、位置情報取得部、追跡部、判定部及び通信部を備える。撮像素子は、被写体像を撮像し、画像を生成する。音声入力部は、音声を入力する。記録処理部は、画像のデータと音声のデータとをメモリに記録する。位置情報取得部は、ユーザの現在位置を示す位置情報を外部から取得する。追跡部は、位置情報に基づいて、ユーザの移動経路を電子地図上で追跡する。判定部は、追跡部の追跡結果に応じて、現在位置が電子地図上で注目位置に該当するか否かを判定する。通信部は、判定部により現在位置が注目位置に該当すると判定された場合、その注目位置において、メモリに記録された画像のデータと音声のデータとの少なくとも何れか一方を他の通信端末に送信する。
(もっと読む)
撮像装置
【課題】 ドームを有する撮像装置の視界が妨害行為により遮られた場合でも、視界を遮られた状態から被写体を撮像し得る状態に自動的に復帰することができ、且つ、コストの面で有利な撮像装置を提供する。
【解決手段】 監視カメラ1は、被写体を撮像して撮像画像データを生成するレンズユニット105と、半球形状に形成され、レンズユニット105を覆うドーム101と、レンズユニット105をパン方向に回転させることができる駆動ユニット200と、駆動ユニット200によるレンズユニット105の回転を制御し、レンズユニット105により生成された撮像画像データに基づいて異常を検知する制御部301と、を有し、駆動ユニット200は、ドーム101もパン方向に回転させることができ、制御部301は、異常を検知した場合に、ドーム101を回転させるように駆動ユニット200を制御する。
(もっと読む)
AR処理装置、AR処理方法及びプログラム
【課題】手間がかからずに、カメラの位置姿勢を精度よく推定できるAR処理装置を提供する。
【解決手段】生成部12は、同一被写体について取得されたペア画像に基づいて、被写体の3Dモデルを生成する。抽出部13は、被合成3Dモデルから複数の第1特徴点を抽出すると共に、合成3Dモデルから複数の第2特徴点を抽出する。取得部14は、複数の第1特徴点と複数の第2特徴点とに基づいて、座標変換パラメータを取得する。変換部15は、この座標変換パラメータを用いて、合成3Dモデルの座標を被合成3Dモデルの座標系の座標に変換する。合成部16は、変換された全ての合成3Dモデルを被合成3Dモデルに合成すると共に、特徴点の統合を行う。保存部17は、合成された被写体の3Dモデルと、統合された特徴点に関する情報をメモリカード等に保存する。ここで保存されたデータは、AR処理で使用される。
(もっと読む)
画像解析プログラム、画像解析装置および撮像装置
【課題】画像上で前景と背景とを簡単に素早く区分する。
【解決手段】画像解析プログラムは、時系列的に撮像された複数の画像を入力する画像入力ステップと、複数の画像の中の第1の画像上で指定された前景または背景の位置を入力する位置入力ステップと、第1の画像上の前景以外の部分または背景の部分に、複数の画像上での背景の動きを検出するための目標領域を設定する領域設定ステップと、複数の画像の中の第2の画像上で目標領域の位置を探索する領域探索ステップと、第1の画像から第2の画像までの目標領域の位置の変化に基づいて背景の動きを検出する動き検出ステップと、動き検出ステップで検出した背景の動きに基づいて、複数の画像上で前景部分と背景部分とを区分する区分ステップとをコンピューターに実行させる。
(もっと読む)
画像ファイル生成装置、画像ファイル生成プログラム及び画像ファイル生成方法
【課題】動画データからスライドショー形式での表示に適切なフレームデータを抽出してファイル化することを可能にする。
【解決手段】ステップS104〜ステップS108のループを繰り返されることにより、動画データからは所定時間ΔT毎にフレームデータが抽出される。また、この抽出されたフレームデータとその直前に抽出されたフレームデータと不一致率が所定以上である場合には、n+1番目に抽出されたフレームデータがRAMのフォルダ作成エリアに格納される。よって、RAMのフォルダ作成エリアには、動画データから所定時間ΔT毎に抽出されたフレームデータであって、その直前に抽出された画像とは異なる複数のフレームデータが格納されることとなる。ステップS104〜ステップS107の処理を、動画データの全長に対して完了したならば、ファイル生成処理を行って、後述する漫画絵のフレームデータを複数含む画像ファイルを生成する(ステップS109)。
(もっと読む)
航空写真撮像方法及び航空写真撮像装置
【課題】簡単な構成で、正確な地形の3次元計測が可能な航空写真撮像方法及び航空写真撮像装置を提供する。
【解決手段】GPS装置23と、下方を撮像する撮像装置13とを具備する飛行体を蛇行飛行させ、蛇行飛行で方向変換する各頂点で撮像し、少なくとも隣接する3頂点で撮像した画像の共通オーバラップ部分から特徴点を抽出し、画像の内の2つの頂点の2画像を組とし、少なくとも2組について、各組毎に前記GPS装置23により測定した2つの頂点の位置情報と、2画像の特徴点とに基づき特徴点に対応する測定点の写真測量を行い、測定点の測量結果が少なくとも2組で一致した場合の特徴点を画像の合成用のタイポイントとする。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】少ない演算量で手ぶれを補正すること。
【解決手段】画像処理装置は、補正部と、生成部と、除去部と、合成部とを備える。補正部は、第1の露光時間で第1の画像を撮影するとともに、第1の露光時間よりも短い第2の露光時間で第2の画像を撮影する撮影部から、第1の画像と第2の画像とを取得するとともに、取得した第1の画像と第2の画像との位置ずれを補正する。生成部は、補正部により補正された第1の画像と、該補正部により補正された第2の画像との差分画像を生成する。除去部は、生成部により生成された差分画像からノイズを除去する。合成部は、除去部によりノイズが除去された差分画像を、第1の画像と合成する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】被写体が撮影されたときの状況に適した画像補正処理を行う。
【解決手段】特徴量導出部102は、撮影記録して得られた入力画像データにより形成される画像に関して、彩度別に入力画像データ中の画素を分類して得られた彩度特性と、明度別に入力画像データ中の画素を分類して得られた明度特性と、入力画像データ中で検出されたエッジ数およびエッジ位置に基づくエッジ特性とを特徴量として導出する。処理適性指標導出部106は、入力画像データに含まれる同一の画素に対して彩度低減と明度増加との両方を行う処理である特定処理を入力画像データに施すことに対する適性の指標である処理適性指標を上記特徴量に基づいて導出する。画像補正処理部110は、処理適性指標に基づき、入力画像データに含まれるそれぞれの画素に対して特定処理を施す。
(もっと読む)
撮影装置、撮影装置の制御方法、画像表示装置、画像表示方法、およびプログラム
【課題】 撮影機器を持って、移動しながら撮影しているシーンで、単に撮影者の様子が記録されるのではなく、撮影者が移動していく様子や離れた位置から撮影した様子を容易に表現することのできる撮影装置、撮影装置の制御方法、画像表示装置、画像表示方法、およびプログラムを提供することを目的とする。
【解決手段】 移動方向と反対方向の撮影を複数回行う撮影機器10において、上記複数回の撮影を順次行う撮像部5と、上記複数回の撮影結果のうち、前に撮影された画像を縮小部1cで縮小して、後に撮影された画像に合成可能かどうかを判定する合成可否判定部1fとを具備する。
(もっと読む)
撮像装置及びプログラム
【課題】撮影時にその指標として利用される撮影補助線を必要時に適切な位置に表示できるようにする。
【解決手段】制御部1は、撮像部6から取得したライブビュー画像をタッチ表示部4に表示させると共に、このライブビュー画像内に含まれている略直線画像を検出し、この略直線画像が略水平或いは略垂直とみなせる場合に、表示されているライブビュー画像内の略直線画像に対応して(例えば、重ね合わせて)撮影補助線(例えば、1本の水平線或いは垂直線)をタッチ表示部4に表示させる。
(もっと読む)
画像識別装置、画像識別方法、画像識別プログラム及び記録媒体
【課題】ブロック画像の分類精度を向上させることができる画像識別装置を提供する。
【解決手段】ブロック画像を分離平面を用いてカテゴリに分類する画像識別装置1であって、対象画像を入力する対象画像入力部10と、ブロック画像を生成するブロック画像生成部11と、ブロック画像の特徴量を演算する特徴量演算部12と、ブロック画像がカテゴリに分類されるか否かを判別するカテゴリ判別部13とを備え、特徴量演算部12は、当該ブロック画像の局所的特徴量及び対象画像全体の全体特徴量を用いるとともに、ブロック画像の複数の特徴を座標軸とする第2特徴量空間において、複数の局所的特徴量を組み合わせてなる特徴量ベクトルの座標位置と、第2特徴量空間の一つ又は複数の任意の領域とを用いて、領域に属する特徴量ベクトルを有するブロック画像を領域ごとにカウントしたブロック画像の数を全体特徴量に含める。
(もっと読む)
携帯通信装置及び合成画像生成プログラム
【課題】特定の瞬間における広い範囲の画像を容易に取得することができる携帯通信装置及び合成画像生成プログラムを提供する。
【解決手段】撮影部101は、第1カメラから第1画像を取り込む。撮影部202は、第2カメラから第2画像を取り込む。判定部107は、第1画像及び第2画像の双方に指定された基準画像が映っているか否かを判定する。画像取得部108は、判定部107により双方の画像に基準画像が映っていると判定された場合、撮影部101及び撮影部202により取り込まれた画像を対応付けて記録する。
(もっと読む)
撮像装置及び制御方法
【課題】 撮影画面内に金屏風などの高反射物が存在する場合であっても、良好な画像を得ることができるようにする。
【解決手段】 複数の測光領域の中から、色情報取得手段により取得した色情報が特定の条件を満たす測光領域を、発光手段の本発光量を演算する際の基準領域を選択する際の対象領域から除外し、選択された基準領域に対応した輝度情報に基づいて輝度情報の重み付け演算を行い本発光量を演算する。
(もっと読む)
221 - 240 / 2,971
[ Back to top ]