
Fターム[5C122FH13]の内容
Fターム[5C122FH13]に分類される特許
161 - 180 / 1,229
画像処理方法および画像処理装置、プログラム
【課題】複数の露光条件を用いたデコンボリューション演算によって得られる複数のぶれ補正画像に対して画像合成を実施することにより、ぶれ補正後に発生するリンギングを抑制する。
【解決手段】露光制御部102の制御の下、複数の露光パターンに従って露光期間中に複数の撮像画像を取得し、前記撮影画像におけるぶれ量を検出するぶれ検出手段と、前記ぶれ検出手段によって得られたぶれ量と前記露光パターンに基づいて関数を作成する手段と、前記関数を撮像画像に適用することで複数の補正画像する画像補正手段と、前記複数の補正画像を合成する画像合成手段を有することを特徴とする画像処理装置。
(もっと読む)
デジタルカメラ

【課題】不均一なパンニングを行った場合における、ローリングシャッタ歪みによる影響を低減する。
【解決手段】デジタルカメラは、行列状に配置された複数の画素を有し、結像光学系を介して結像した被写体の像をローリングシャッタ方式により撮像する撮像素子と、カメラに加わるブレ成分を検出する検出手段と、検出手段により検出された第1のブレ成分に基づいて、光軸に直交する方向における結像光学系と撮像素子との相対位置を変更して撮像素子上での像ブレを補正するブレ補正手段と、検出手段により検出された第2のブレ成分に基づいて、ローリングシャッタ方式に起因して被写体の像に発生する歪みを、ブレ補正手段を用いて補正する補正制御手段とを備える。
(もっと読む)
撮像装置及びそのプログラム
【課題】 ブレの状態に応じて適切にブレを抑制することができる撮像装置及びそのプログラムを実現する。
【解決手段】 機械式ブレ補正と感度式ブレ軽減とを備えた撮像装置において、スルー画像表示中において取得されたブレ動きベクトルに基づいて被写体ブレ量を算出していき、該算出された被写体ブレ量に基づいて順次前記機械式ブレ補正と感度式ブレ軽減の利用比率を設定する。そして、静止画撮影時においては、直近に設定された利用比率に応じて行なわれた機械式ブレ補正及び感度式ブレ軽減によるブレ補正後の静止画像データを記録する。
(もっと読む)
透視変換パラメータ生成装置、画像補正装置、透視変換パラメータ生成方法、画像補正方法、及びプログラム
【課題】従来の技術では、信頼性の高い2個の画像間の大域的な動きを推定する透視変換パラメータを生成することができない。
【解決手段】透視変換パラメータ生成装置は、第1のフレームと、第2のフレームとを取得する取得部11と、取得された第1のフレームのなかの第1の四辺形の各辺の複数の位置それぞれについて、取得された第2のフレームの対応する位置への動きベクトルを検出する動きベクトル検出部13と、検出された各動きベクトルの始点を第1の四辺形の対応する位置に一致させ、そのときの第1の四辺形の各辺について、全ての動きベクトルの終点を一つの直線で近似的に結び、その結んで得られる4個の直線によって形成される第2の四辺形の4個の頂点の座標と、第1の四辺形の4個の頂点の座標とを用いて、透視変換パラメータを生成する透視変換パラメータ生成部14とを有する。
(もっと読む)
撮影装置および遠隔作業支援システム
【課題】本発明は、頭部装着式のカメラにおいて、頭部が高速に移動したり揺れたりした場合でもあっても、このカメラによって撮影された映像の被写体を認識しやすく見やすくすることができる撮影装置および遠隔作業支援システムを提供する。
【解決手段】本発明の撮影装置1は、頭部に装着する装着ユニット10と、被写体を撮影する撮影ユニット20と、前記頭部の角速度を検出する角速度センサユニット30と、角速度センサユニット30で検出された前記頭部の角速度に基づいて、撮影ユニット20によって撮影された被写体の映像を表示する場合における被写体の映像のフレームレートを下げる映像表示制御部63とを備える。
(もっと読む)
画像処理装置、撮像装置
【課題】動きベクトルや視差情報を高精度、かつ、高速に検出する画像処理装置、当該装置を備えた撮像装置を提供する。
【解決手段】基準マクロブロック設定部11aは、画像フレームメモリ22の第1画像フレームに対して基準マクロブロックを設定する。探索マクロブロック設定部11bは、基準マクロブロック設定部11aが第1画像フレームに設定した基準マクロブロックのベイヤ配列状の原色画素配置と同じベイヤ配列状の原色画素配置になるように第2画像フレームに対して探索マクロブロックを設定する。
(もっと読む)
画像処理装置、画像処理方法、及びコンピュータプログラム
【課題】望ましくない映像のぶれを抽出して補正する。
【解決手段】カメラワーク、撮影方法、映像フォーマットといった撮影条件に応じて、映像のぶれの周波数情報を予め記憶しておく。そして、ユーザーによって指定された撮影条件に対応する周波数情報を選択し、選択した周波数情報に基づいて通過周波数帯域を決定し、決定した通過周波数帯域を有するフィルタを生成する。また、映像のぶれの時間変化を、相互に隣接するフレームの画像のシフト量と、画像の回転量とを算出することで求める。そして、映像のぶれの時間変化の情報を、生成したフィルタでフィルタリングし、映像のぶれ成分をフィルタリングする。
(もっと読む)
撮像装置及びその制御方法
【課題】 撮像装置の回路規模や、プログラムの処理時間増加を低減しながら、精度の高い手ぶれ補正を行うこと。
【解決手段】 振れを検出して、該検出した振れの大きさを示す振れ信号を出力する振れ検出部(114)と、前記振れ検出部から出力された振れ信号を増幅するための、増幅率が可変な増幅部(101)と、予め設定された前記振れ信号の振幅範囲に収まると予測される値に前記増幅率を設定し、前記増幅部に設定する増幅率設定部と、前記増幅部により増幅された振れ信号に基づいて、前記検出した振れを補正するための振れ補正量を算出する振れ補正量算出算出部(107)と、前記振れ補正量を用いて振れを補正する振れ補正手段(103、301〜303)とを有する。
(もっと読む)
動き補正装置およびその方法
【課題】回転や拡大縮小といった要素を含む動きのある画像に対しても精度の高い的確なブレ補正が可能な動き補正装置およびその方法を提供する。
【解決手段】時間的に連続する画像から特徴点を抽出する特徴点抽出部120と、特徴点の移動量を検出する移動量検出部130と、記移動量を元に画像のブレ補正を行うブレ補正部170と、を有し、特徴点抽出部120は、画像の四隅における特徴点を抽出し、ブレ補正部170は、特徴点抽出部120で抽出された特徴点の移動量を用いて画像の射影変換を施してブレ補正を行う。
(もっと読む)
空間画像事前確率を用いたぼけ画像修正
ぼけ修正画像を決定する方法であって、前記方法は、データ処理システムにより少なくとも一部が実施され、短い露光時間でキャプチャされたシーンの鮮明な画像を受信するステップ、前記鮮明な画像より長い露光時間でキャプチャされた前記シーンのぼけ画像を受信するステップであって、前記ぼけ画像は前記鮮明な画像より高いレベルのモーション・ブラー及び低いレベルの画像ノイズを有する、ステップ、前記鮮明な画像及び前記ぼけ画像に応答してぼけの中核を決定するステップ、前記鮮明な画像に応答して1又は複数の基準差分画像を決定するステップ、前記ぼけ画像、前記ぼけの中核及び前記1又は複数の基準差分画像に応答してぼけ修正画像を決定するステップ、前記ぼけ修正画像をプロセッサによりアクセス可能なメモリ・システムに格納するステップ、を有する方法。  (もっと読む)
(もっと読む)
画像撮影装置および画像表示装置およびその方法
【課題】デジタルカメラ等で、記録解像度が表示解像度よりも大きく、記録画像から表示領域を抽出して表示する際、自装置を動かして表示位置を決定する方法があるが、自装置の移動量検出手段を追加する必要があった。
【解決手段】本発明では、表示の際の自装置の移動量検出を撮影時の手振れ補正手段と共用化し、撮影時と再生時とでブレ判定の閾値を変更することで実現する。これにより低コストで、撮影時に被写体を追いかけるのと同様の操作で表示領域を選択可能となる。
(もっと読む)
撮像装置およびその制御方法
【課題】補助光源を用いた撮影画像に対するぶれ補正を行って適切な明るさの画像を取得する。
【解決手段】補助光源を有する撮像装置であって、ぶれ補正後の画像が適切な明るさとなるように撮影条件に基づいて、(a)に示す補助光源における発光のオン/オフを1/0で示す発光パターンを決定する。そして、該発光パターンに従って補助光源を発光させて撮影を行い、その撮影画像および該撮影時のぶれ情報を取得する。そして、ぶれ情報および前記発光パターンに基づいて、撮影画像に対するぶれ補正を行う。なお、発光パターンは(b)に示すように、その点像分布関数の演算結果における周波数特性が非ゼロの値で構成されるように設定されている。
(もっと読む)
撮像装置、画像処理方法及びプログラム
【課題】被写体領域の抽出の精度を向上させる。
【解決手段】撮像装置100であって、背景内に被写体が存在する被写体存在画像を撮像し、次に、被写体存在画像の撮像の際の撮像条件と同じ撮像条件で、被写体の存在しない背景画像を撮像する撮像手段としてのレンズ部1、電子撮像部2及び撮像制御部3と、被写体存在画像と背景画像との位置合わせを行った後、位置合わせされた被写体存在画像と背景画像との間で対応する各画素の差分情報を生成して、当該差分情報に基づいて被写体存在画像から被写体が含まれる被写体領域を抽出する画像処理部8とを備える。
(もっと読む)
像ブレ補正装置及び撮像装置
【課題】必要なときだけ補正光学系に光軸方向に付勢し、摺動時の負荷を生じさせずに像ブレを補正すると共に光学面を安定させることができる。
【解決手段】CPU50は、手ブレ補正機能がONに設定されているかどうかを判断する(ステップS10)。手ブレ補正機能がONに設定されていない場合(ステップS10でNO)には、付勢コイルへ所定の値Iaで電流を継続して流し、撮像素子が継続的に所定の付勢力Faで光軸方向(−z方向)に付勢される(ステップS11)。手ブレ補正機能がONに設定されている場合(ステップS10でYES)には、CPU50は、付勢コイル35cへの電流をOFFにし、付勢コイル35cに電流が流れないようにし(ステップS12)、像ブレ補正機構24により撮像素子23に結像される被写体像の像ブレの補正を開始する(ステップS13)。
(もっと読む)
光学機器
【課題】角速度センサと加速度センサの向きを精度良く決め、光学機器の内部で発生する振動が各センサに影響しないようにする。
【解決手段】光学機器は、角速度センサ302,303と、加速度センサ304と、これらセンサが実装されたフレキシブル基板301と、該フレキシブル基板を保持し、該光学機器の本体22に取り付けられるセンサ保持部材300とを有する。センサ保持部材は、互いに異なる方向を向く平面として形成され、フレキシブル基板における角速度センサの実装部分および加速度センサの実装部分をそれぞれ保持する角速度センサ保持面300b,300cおよび加速度センサ保持面300dと、本体に平面として形成された本体側取り付け面22eに対向する平面として形成され、該本体側取り付け面に振動吸収部材305を介して取り付けられる保持部材側取り付け面300aとを有する。
(もっと読む)
複眼撮影装置及びその姿勢検出方法
【課題】撮影画像が立体視に不具合のある画像であるか否かの判別を、低コストかつ簡単に行う。
【解決手段】ステレオ撮影により得られた基準,参照画像データからそれぞれ特徴点74、対応点77を抽出する。特徴点74及び対応点77の位置を比較することにより、カメラ本体11の姿勢を求める。求めた姿勢と、予め定めたカメラ本体11の基準姿勢とのずれ量(姿勢ずれ量)を求める。姿勢ずれ量の大きさに基づき、立体視に問題のない画像はOK画像グループに振り分け、立体視に不具合が生じる画像はNG画像グループに振り分ける。OK画像グループの基準,参照画像データは、メモリカード20のOK画像格納部20aに格納し、NG画像グループの基準,参照画像データは、NG画像格納部20bに格納する、あるいは破棄する。
(もっと読む)
撮像装置
【課題】使用者の操作状況に応じて適切な露光時間を設定できる撮像装置を提供することを目的とする。
【解決手段】
撮像装置は、光学系を介して生成された被写体像を撮像して画像データを生成する撮像手段と、生成した画像データを記録媒体に記録する記録手段と、撮像手段に対する露光時間を調節する調節手段と、自機のぶれを検出するぶれ検出手段と、使用者により操作され、第一の操作状態および第二の操作状態をとり得る操作手段と、操作手段が第一の操作状態となったときに、撮像手段が生成する画像データを前記記録媒体に記録するよう記録手段を制御する制御手段とを備える。制御手段は、操作手段が第一の操作状態となる前に第二の操作状態となったか否かを判定し、その判定結果と、ぶれ検出手段で検出された自機のぶれとに基づいて、調節手段の露光時間を調節する。
(もっと読む)
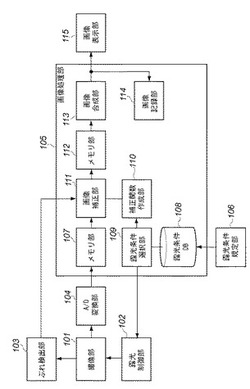
画像処理装置およびその方法
【課題】デコンボリューション演算暈け補正処理によって生じる画質劣化を除去する。
【解決手段】画像処理部105は、コード化露光によって撮像した画像データ、シャッタの開閉パターン情報、振れ情報を入力し、除外領域抽出部107は、振れ情報が画像全体の動きとは異なる動きの画像領域を、複数の画像データから抽出し、画像領域の画像を切り出す。画素補完部110は、画像データについて、画像領域を所定の画素の値によって補完する。振れ補正部111は、画像領域を補完した複数の画像データ、開閉パターンを示す情報、および、撮像装置の振れ情報を用いて、撮像装置の振れに起因する画像の暈けを補正した第一の画像データを生成する。局所処理部113は、複数の画像データの画像領域から切り出された画像に所定の処理を施した第二の画像データを生成する。画像合成部112は、第一の画像データの画像領域に第二の画像データを上書き合成する。
(もっと読む)
カメラ
【課題】電子的に手ブレ補正処理を施す場合の画質の劣化を防ぐ。
【解決手段】カメラは、被写体の移動に伴い被写体の像に発生するブレとカメラ本体に加わるブレとの少なくとも一方の有無を判定するブレ判定手段と、ブレ判定手段によりブレ無しが判定された場合、適正露出に対応するシャッタ秒時を適正シャッタ秒時として設定し、ブレ有りが判定された場合、適正シャッタ秒時よりも短いシャッタ秒時を設定するシャッタ秒時設定手段と、シャッタ秒時設定手段により設定されたシャッタ秒時で被写体の像を撮像し、画像データを生成する撮像手段と、ブレ有りが判定された場合に、撮像手段により生成された画像データの明るさを高める処理の程度をブレ無しが判定された場合よりも高くして処理を施す画像処理手段とを備える。
(もっと読む)
撮像装置及びその制御方法
【課題】立体撮影モードをもつ撮像装置において、少なくとも1つの振れ補正手段の状態に応じて他の振れ補正手段の補正特性を変更することにより、撮影者へ不快感を軽減し、かつ正確な立体画像を提供すること。
【解決手段】撮像装置は、同一被写体を異なる視点から撮影するために複数の撮像手段を備える。振れ検出部324が検出した撮像手段の振れの検出結果は振れ補正手段に送られ、フィルタ演算により撮像手段ごとに振れ補正量が算出される。シフトレンズ駆動制御部304,315は、演算結果に応じて光学像の振れを補正するためにシフトレンズ303,314の駆動をそれぞれ制御する。補正特性変更部107は、振れ補正の状態に係る検出結果をシフトレンズ駆動制御部304,315から取得し、デジタルローパスフィルタ102,108のカットオフ周波数、ゲイン又は演算出力の範囲を変更することにより、振れ補正手段の特性を変更する。
(もっと読む)
161 - 180 / 1,229
[ Back to top ]