
Fターム[5C122FH13]の内容
Fターム[5C122FH13]に分類される特許
141 - 160 / 1,229
手ぶれ補正装置、撮像処理方法及びプログラム
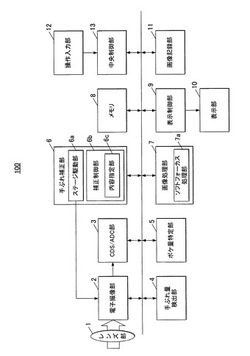
【課題】撮像画像に手ぶれ以外に起因してボケが生じる場合に、手ぶれ補正可能範囲を相対的に拡大させる。
【解決手段】撮像装置100であって、被写体の撮像の際の手ぶれ量を逐次検出する手ぶれ量検出部4と、逐次検出される手ぶれ量を補正するようにステージ部を逐次駆動させるステージ駆動部6aと、撮像画像に手ぶれ以外に起因して生じるボケ量を特定するボケ量特定部5と、特定されるボケ量が大きくなるほど手ぶれ補正処理の強度を弱くするようにステージ駆動部によるステージ部の駆動を制御する補正制御部6bと、を備えている。
(もっと読む)
画像動き補正装置およびその方法、並びに撮像装置

【課題】動画像のブレを検出する際の誤検出を防止でき、ブレのない所望の補正画像を得られ、画像品質を保持することが可能な画像動き補正装置およびその方法、並びに撮像装置を提供する。
【解決手段】撮像装置100は、時間的に連続する画像間の動きを検出する動き量検出部150と、動き量検出部で検出した動きを相殺するように画像の位置およびもしくは大きさを補正する機能を含む動き補正部160と、を有し、動き補正部160は、補正した画像とこの画像の前のフレームの画像との差分の積算値と、補正した画像を任意の方向にシフトした画像と前のフレームの画像との差分の積算値を比較して、補正した画像をシフトした場合の積算値の方が小さい場合には、補正が誤検出であると判断する。
(もっと読む)
撮像装置、撮像方法、および、撮像プログラム
【課題】動画撮影時に、画像間の位置ずれを補正してから画像合成する場合にも、滑らかな動画表示を行う。
【解決手段】連続的な撮像により得られた複数の画像間の位置ずれを検出し、検出した位置ずれに基づいて、複数の画像間の位置ずれを補正してから合成することによって、合成画像を生成する。この時、動画撮影時には、静止画撮影時に位置ずれを検出(S80)する方法とは異なる位置ずれ検出方法にて、複数の画像間の位置ずれを検出する(S100)。
(もっと読む)
画像処理装置およびその制御方法
【課題】撮像時にぶれが発生した画像における画質劣化を軽減可能とする。
【解決手段】露光条件を変化させ撮像する撮像部により取得された画像データを入力する画像入力手段と、露光条件を示す露光条件情報を取得する露光条件取得手段と、ぶれの軌跡を示すぶれ軌跡情報を取得するぶれ軌跡取得手段と、露光条件とぶれ軌跡情報とに基づいて画像データに発生しているぶれと同様のぶれが発生している第1ぶれ画像データを生成する第1ぶれ画像生成手段と、画像データと第1ぶれ画像データとの差分である差分画像データを生成する差分画像生成手段と、露光条件とぶれ軌跡情報とに基づいて差分画像データから画像データに発生しているぶれと逆のぶれが発生している第2ぶれ画像データを生成する第2ぶれ画像生成手段と、画像データから所定の重みを乗じた第2ぶれ画像データを減算して得られる補正画像データを生成する補正画像生成手段とを含む。
(もっと読む)
撮像装置
【課題】手ブレによる像ブレのない良好な撮影が行い易く、また手ブレが発生した場合には効果的にブレを補正する。
【解決手段】印加電圧に応じて層内で屈折率のグラデーションを発生するブレ補正素子21X,21Yと、このブレ補正素子を撮影光軸上に配置してなるズームレンズ・ユニット210と、このズームレンズ・ユニットにより撮像面に結像された被写体像を撮像する撮像素子73と、発生したブレのブレ量を検出する角速度センサ108,109と、この角速度センサにより検出されたブレ量に応じてブレ補正量を算出するブレ補正量算出部245と、ブレ補正素子に電圧を印加するブレ補正素子X方向駆動部215,ブレ補正素子Y方向駆動部216と、ブレ補正量算出部により算出された補正量に従って、撮像素子73の撮像面での像ブレを抑制するようにブレ補正素子X方向駆動部,ブレ補正素子Y方向駆動部を制御するカメラ制御部241とを備えてなる。
(もっと読む)
振れ補正機能を有する移動電子デバイス及びその振れ補正方法
【課題】本発明は、振れ補正機能を有する移動電子デバイス及びその振れ補正方法を提供する。
【解決手段】本発明に係る移動電子デバイスは、中央処理装置、画像処理ユニット、振れセンサー及び振れ補正モジュールを備え、振れ補正モジュールは、振れセンサーが検出した振れ信号を採集する振れ信号採集サブモジュールと、前記振れ信号をフィルタリングして前記振れ信号の中のノイズを除去するフィルタサブモジュールと、ノイズが除去された前記振れ信号によって振れ変位量を計算する振れ変位量計算サブモジュールと、前記振れ変位量に基づいて振れ変位補正量を計算する振れ変位補正量計算サブモジュールと、前記振れ変位補正量に基づいて画像処理ユニットによって移動電子デバイスのディスプレイに表示される画像を移動させて振れ補正を行う画像制御サブモジュールと、を備える。本発明は、振れ補正方法も提供する。
(もっと読む)
デジタルビデオ画像を撮像および伝送するための画像撮像システム、デジタル画像データを受信および処理するための画像データ処理システム、画像手ぶれ補正システム、および、手ぶれが少ないデジタルビデオ画像の生成方法
本発明は、ビデオ画像の手ぶれ補正システムに関する。この手ぶれ補正システムでは、画像撮像システム(2)の撮像センサ(4)によってデジタル画像データが検出され、該画像撮像システム(2)の位置は位置制御部によってモデルベースで制御される。前記画像撮像システム(2)の位置変化が動きセンサ(5)によって検出され、前記位置制御部の実際の制御データと、前記モデル(6)の最新のパラメータセットと、前記動きセンサ(5)の累積された出力データとともに、画像データ処理システム(3)へ伝送される。前記画像データ処理システム(3)において、前記制御データと前記パラメータセットと前記モデルの受信側のコピーとに基づき、前記画像撮像システム(2)の不所望の位置変化と所望の位置変化とが区別され、不所望の位置変化が補償されるように前記画像データが補正される。本発明は、航空機による物標監視に使用可能であり、手ぶれと所望の動きとを確実に区別できるという利点を有する。  (もっと読む)
(もっと読む)
撮像装置及び振れ補正方法
【課題】 光学式手ブレ補正方式と電子式手ブレ補正方式とを併用するブレ補正方法において、蓄積時間中のブレを最小限に抑えながら、手ブレ補正性能を向上すること。
【解決手段】 撮像装置に加わる振れを検出する振れ検出センサ(102)と、撮像された画像から動きベクトルを検出する動きベクトル検出部(122)と、検出された振れに基づいて得られた信号と、動きベクトルに所定の係数1−K(0≦K≦1)を乗算した信号から、第1の補正量を演算する第1の演算手段(110)と、動きベクトルに所定の係数K(0≦K≦1)を乗算した信号から、第2の補正量を演算する第2の演算手段(129)と、第1の補正量に基づいて、振れを光学的に補正する補正光学系(117)と、第2の補正量に基づいて、振れを画像の切り出し範囲を変更することによって補正するメモリ読み出し制御部(124)とを有し、前記補正光学系とメモリ読み出し制御部を併用して振れ補正を行う。
(もっと読む)
撮像装置及びその制御方法
【課題】順次読み出し型のCMOSセンサを撮像素子とする撮像装置において、画像切り出しによる電子防振によって蓄積時間内のある瞬間の揺れを補正する場合、ライン毎に蓄積タイミングの異なるローリングシャッタ方式で発生する画面内の被写体の歪みを抑圧する。
【解決手段】焦点距離と検出された揺れの振幅及び周波数に応じて手振れの補正量を適応的に変化させることによって、ローリングシャッタによる歪みの影響を低減させながら、手振れ補正効果を高められるようにする。即ち、撮像素子からの画像信号を基に単位時間当りの撮像面上での被写体の移動量を検出し、前記検出した焦点距離情報と前記検出した単位時間当りの被写体の移動量に応じて補正量を算出する。そして、算出した補正量に基づいて電子的に手振れを補正する。
(もっと読む)
撮像装置、撮像装置の制御方法、およびプログラム
【課題】ライブビュー表示された画像に基づいて手動操作によるフォーカス調整が可能で、当該フォーカス調整を容易にする撮像装置を提供する。
【解決手段】撮像装置1は、CPU11が拡大率調整プログラムを実行することで、画像の一部が表示部80に拡大して表示されているときのパラメータを取得し、当該取得したパラメータに基づいて、拡大表示制御プログラムの実行時に画像の一部を拡大して表示する際の拡大率を変化させることができるように構成される。
(もっと読む)
撮像装置及び撮像装置の制御方法
【課題】歩行撮影時のように撮像装置に加わるブレが大きくなっても、撮像素子の露光時間中の像ブレによる画質劣化を改善できるようにする。
【解決手段】撮像光学系により撮像面に結像された被写体像を光電変換して画像信号を出力する撮像手段と、前記撮像手段が前記画像信号を生成する露光時間を設定する露光時間設定手段と、装置のブレを検出するブレ検出手段と、装置のブレに起因する画像のブレを補正する補正モードを複数有するブレ補正手段と、前記ブレ検出手段の検出出力に基づいてブレ補正制御信号を算出し、前記ブレ補正手段を制御するブレ補正制御手段と、前記ブレ補正手段が有する複数のブレ補正モードの中から、前記装置のブレに起因する画像のブレを補正するための補正モードを設定するブレ補正モード設定手段とを設け、装置に加わる振幅が大きくなるほどブレ補正ゲイン出力を減衰させるようにブレ補正制御信号を算出する。
(もっと読む)
撮像装置及び画像処理方法
【課題】被写体画像に対して、ユーザが望む領域に所望の画像処理を施す。
【解決手段】被写体像が結像されて被写体の画像データを取得する撮像素子170と、画像データに基づいて画像を表示する表示部102と、表示部102内の任意の領域を指定する領域指定部120と、撮像した画像データについて、領域の内外で異なる画像処理を行う画像処理部180と、を備える。
(もっと読む)
撮像装置
【課題】使用者が撮影を望む画像に関連する画像を自動的に記録する撮像装置を提供することを目的とする。
【解決手段】被写体像を撮像し、動画像データを生成する撮像手段と、撮像手段により生成された動画像データを記憶可能な記憶手段と、自装置が使用者により撮影姿勢で保持されているかを判定する判定手段と、判定手段により自装置が撮影姿勢で保持されていると判定されるのに応じて、撮像手段により撮像された動画像データの記憶手段への記録を開始し、直近の所定時間分の動画像データを記憶手段に記憶させる記録手段と、を備える。
(もっと読む)
信号処理装置及びその制御方法並びにカメラ
【課題】 1つの操作部材に対してその操作方法に応じて複数の機能を実現する機器に対して、ユーザが混乱することなく操作できるようにする。
【解決手段】 システム制御部は、操作部材に対する操作の開始に応答して所定の機能を実行し、その操作の終了に応答して上記所定の機能の実行を終了するように制御を行う。タイマー機能部は、上記操作部材に対する操作の開始から終了までの時間を計測する。タイマー機能部によって計測された時間が所定時間以下である場合、システム制御部は、上記操作部材の操作方法に対する警告を出力する(404)。
(もっと読む)
画像処理プログラムおよび撮像装置
【課題】 位置ずれを含む複数の画像から、それらの画像よりも解像度の高い合成画像を生成する画像処理において、処理時間を短縮すること。
【解決手段】 複数の色成分から成り、位置ずれを含む複数の画像から、複数の画像よりも解像度の高い合成画像を生成する画像処理をコンピュータで実現するためのプログラムであって、複数の画像と、複数の画像間の位置ずれを示す位置ずれ情報とを取得する取得ステップと、位置ずれ情報に対して重み付け処理を行うための重み付け情報を複数の色成分のそれぞれについて算出する第1の算出ステップと、位置ずれ情報に対して、重み付け情報に基づく重み付け処理を、複数の色成分ごとに行うとともに、複数の色成分のうち、算出対象の色成分以外の色成分の局所的変曲情報と、重み付け処理後の重み付け情報とに基づいて、算出対象の色成分の画素値を算出する第2の算出ステップと、第2の算出ステップによる算出結果に基づいて、合成画像を生成する生成ステップとを備える。
(もっと読む)
画像処理装置、画像処理方法
【課題】 1枚の画像からであってもぶれ、特には非等速運動の手ぶれ、を補正した精度の良い画像を得る為の技術を提供すること。
【解決手段】 フィルタ係数算出部105は、画像の撮像中に時間幅Δt毎に収集された露光条件情報、ぶれベクトル情報を取得し、フィルタの着目位置と時刻Δt×nのぶれベクトル情報の差分に対応する補間Kernelの値を取得する。時刻Δt×nの露光条件情報、補間Kernelの値、Δtの乗算結果をフィルタの着目位置の係数に加算する。全てのnについて上記処理を行うことで上記着目位置の係数を確定させる。フィルタの全位置について上記処理を行うことでフィルタの全係数を確定させる。デコンボリューション部106は、確定したフィルタと画像とのデコンボリューションを行う。
(もっと読む)
画像処理装置およびその制御方法
【課題】撮像時にぶれが発生した画像における画質劣化を軽減可能とする画像処理技術を提供する。
【解決手段】画像処理装置において、画像入力手段と、ぶれ情報を入力する撮像情報入力手段と、ぶれ情報に基づいて、撮像時の拡縮ぶれの中心位置および拡縮率を算出する算出手段と、画像データの各々について、各画素の座標値を、中心位置を原点とした対数スケールの座標値に変換する第1変換手段と、変換された複数の画像データに対し所定のシフトぶれ補正処理を施し1つの補正画像データを生成する生成手段と、生成手段により生成された補正画像データの各画素の座標値を、中心座標を原点とした線形スケールの座標値に変換する第2変換手段と、線形スケールの座標値に変換された補正画像データを出力する出力手段と、を含み、所定のシフトぶれ補正処理は、ぶれ情報により基づいて算出されるぶれの軌跡および所定のパターンの畳み込み演算の逆変換を含む。
(もっと読む)
撮像装置、撮像方法、およびプログラム
【課題】ズームをテレ端側にした場合にも従来の光学手振れ補正に比較してより大きな補正角を確保する。
【解決手段】ワイド端では撮像画像の解像度を重視して3(deg)程度の補正角を確保するようにし、その後テレ側に移動するまでは、手振れ補正性能を重視して1(deg)程度の補正角が維持されるようにし、テレ端側ではズーム倍率を重視しつつも0.6(deg)以上の補正角を確保するように設計するためには、光学手振れ補正に組み合わせる電子手振れ補正については、曲線L1との比較により、同図の横軸値1乃至4付近は補正量をゼロとし、同図の横軸値4乃至11付近は補正量を徐々に増すようにし、同図の横軸値11付近以降は補正量が一定となるように設計すればよい。本発明は、デジタルビデオカメラに適用できる。
(もっと読む)
画像振れ補正装置
【課題】パン又はチルト操作の終了時に発生する画像のゆれ戻しがあっても、撮像中はその影響を全く受けない画像振れ補正を実現できる。
【解決手段】振動に対応する角速度信号を出力する角速度検出手段101と、前記角速度信号に基づいて前記振動を打ち消すために可動部を駆動する駆動手段106と、前記可動部の位置に対応する位置信号を出力する位置検出手段107と、前記位置信号を微分する微分手段108と、前記角速度信号から前記微分された位置信号を減算する減算手段と、前記減算手段の減算結果に基づいて前記駆動手段を制御する制御手段と、を備えることを特徴とする。
(もっと読む)
画像撮影装置及び画像撮影方法
【課題】ある静止画像の記録処理中であり、他の静止画像を記録することができない場合であっても、適切な静止画像を記録する。
【解決手段】動画像の撮影中に静止画を撮影する画像撮影装置の一例であるビデオカメラ100であって、動画像を撮影するとともに、動画像の撮影中に静止画を撮影する撮影部110と、撮影部110によって撮影された静止画を記録媒体150に記録する記録部120と、動画像をフレーム毎に評価することで、フレームの画像評価値を決定する評価部130と、撮影部110によって撮影された第1静止画の記録を記録部120が開始した時点から予め定められた期間内に撮影部110によって撮影された第2静止画に対応する第2フレームの画像評価値が、第1静止画に対応する第1フレームの画像評価値より高い場合に、第1静止画の記録を中止するとともに、第2静止画を記録するように記録部120を制御する記録制御部140とを備える。
(もっと読む)
141 - 160 / 1,229
[ Back to top ]