
Fターム[5C122FH16]の内容
Fターム[5C122FH16]に分類される特許
1 - 20 / 637
撮像装置及びその制御方法、並びにプログラム
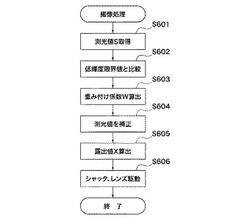
【課題】低輝度限界以下の被写体輝度となる測光領域が存在する場合でも適正な露出となるように制御可能な撮像装置及びその制御方法、並びにプログラムを提供する。
【解決手段】撮像装置1は、輝度限界値に応じた補正を行わない測光値に対する重み付け係数を輝度限界値に応じた補正を行う測光値に対する重み付け係数よりも大きくして、測光されることで得られた複数の測光値の重み付け演算を行い、演算結果に基づいて露出値を決定する。
(もっと読む)
露出制御装置

【課題】従来よりも適切な露出制御を行うことが可能な、新規かつ改良された露出制御装置を提供する。
【解決手段】上記課題を解決するために、本発明のある観点によれば、撮像画像を取得する撮像画像取得部と、撮像画像を複数のブロックに分割するブロック分割部と、ブロック毎に輝度を含む特徴量を算出する特徴量算出部と、各ブロックの特徴量に基づいて、各ブロックの複雑度を算出する複雑度算出部と、各ブロックの複雑度に基づいて、各ブロックの輝度に重み付けすることで、各ブロックの補正輝度を算出する補正輝度算出部と、補正輝度の平均値に基づいて、撮像時の露出を制御する露出制御部と、を備えることを特徴とする、露出制御装置が提供される。
(もっと読む)
画像化システム
【課題】
本発明が解決しようとする課題は、画像データをより効率的に使うことである。
【解決手段】
1つの実施例によれば、画像化システムは、処理システム及び表示生成器を含む。処理システムは、カメラから受け取った信号を処理することにより、中心窩表示領域のために中心窩データを生成し、かつ、周縁表示領域のために周縁データを生成するように動作する。周縁データは、中心窩データの画素密度に比べて、低い画素密度を持つ。表示生成器は、1:nの写像率により、中心窩データから、中心窩表示領域を生成し、かつ、1:mの写像率により、周縁データから、周縁表示領域を生成するように動作する。ここでmはnより大きい。
(もっと読む)
撮像装置
【課題】被写体が大きく動いている場合でも、ユーザが被写体を見失うことなく動画を撮影することができる撮像装置を提供する。
【解決手段】二次元の行列状に配置された複数の画素を有する固体撮像装置を具備し、固体撮像装置に配置された全ての画素の領域の内、予め定められた画素領域内に配置された画素から出力された画素信号に応じた画像信号を出力する撮像部と、撮像部から出力された画像信号に対して画像処理を行った動画像データを生成する複数の画像処理部と、を備え、複数の画像処理部のそれぞれは、撮像部から出力された画像信号を該画像処理部の数に分割した、いずれか1つの分割画像信号に対して画像処理を行って、該分割画像信号のそれぞれに応じた動画像データを生成する。
(もっと読む)
情報出力装置、検知装置、プログラム及び情報出力方法
【課題】種々の誤検知発生要因に対応することが可能な情報出力装置、検知装置、プログラム及び情報出力方法を提供する。
【解決手段】被写体を撮影した画像に関する情報を出力する情報出力装置であって、前記画像を1又は複数の画像エリアに分割する分割手段と、撮影時間の異なる複数の前記画像から当該画像間の差分となる特徴量を前記画像エリア毎に算出する特徴量算出手段と、前記特徴量算出手段で算出された各画像エリアの特徴量に基づいて、前記特徴量に変化のある画像エリアを検知する画像エリア検知手段と、前記画像を構成する各画像エリアから、前記被写体のおかれる環境に応じて定まる条件に該当する画像エリアを特定する特定手段と、前記検知手段が検知した画像エリアから前記特定手段にて特定された画像エリアを除いた画像エリアに関する情報を出力する出力手段と、を備える。
(もっと読む)
撮像装置、撮像方法およびプログラム
【課題】被写体検出による被写体領域とトラッキングによる追跡領域とを適切に併用して撮像に係る各種の制御を遂行する。
【解決手段】撮像部124は、被写体を撮像し画像データを生成する。被写体検出部170は、取得された画像データについて、被写体領域を特定する。トラッキング部174は、取得された画像データについて、追跡対象である追跡領域を特定する。距離判断部176は、特定された追跡領域から所定距離内に、特定された被写体領域が含まれるか否かを判断する。領域統合部178は、特定された被写体領域が所定距離内に含まれる場合、特定された追跡領域に関する情報に被写体領域に関する情報を統合する。制御部は、領域統合部によって被写体領域に関する情報が追跡領域の情報に統合されると、その被写体領域を使用して撮像の制御を行う。
(もっと読む)
撮像装置
【課題】シャッタチャンスを逃さずに、また全体としての撮影時間も少なくしつつ、ユーザが所望の合焦状態の画像を得ることができる撮像装置を提供すること。
【解決手段】ユーザによるレリーズ指示を受けて、CPU101は、撮影時の被写体を判断し、判断した被写体に応じて撮像部102等の撮影パラメータ、並びにフォーカスレンズのスキャン範囲及びスキャン方向を設定する。その後、CPU101は、フォーカスレンズの駆動と同期するように撮像部102を連続動作させる。合焦評価部111は、撮像部102を介して得られた画像データの合焦状態を評価し、この評価結果に応じて画像データ及び合焦画像情報を記憶させる。撮影終了後に、CPU101は、合焦画像情報に従って、マルチフォーカス画像を表示部108に表示させる。ユーザは、表示部108に表示されたマルチフォーカス画像に対して種々の処理を行うことが可能である。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び、撮像装置
【課題】ノイズ量を低減しつつ揺れの少ない動画像を得ることを目的とする。
【解決手段】画像処理装置は、算出した動きベクトルに基づいて、参照画像を基準画像に位置合わせするように動き補償する動き補償部(102)と、基準画像において前記合成処理の対象画素を含む領域内にどのくらい高周波成分が含まれているかを示す高周波成分値を算出する高周波成分算出部(103)と、高周波成分値がより大きい場合に高周波成分値がより小さい場合と比較してより少なくなるような量のノイズ成分を生成するノイズ生成部(104)と、ノイズ成分と参照画像と基準画像を用いて対象画素の動き補償の信頼度を算出する信頼度算出部(105)と、信頼度に応じて基準画像の対象画素と参照画像において前記対象画素に対応する対応画素との合成比率を算出し、合成比率に基づいて対象画素と対応画素を合成する合成部(106)と、を備える。
(もっと読む)
被写体追尾装置およびカメラ
【課題】被写体を正確に追尾できること。
【解決手段】被写体追尾装置は、入力画像内に設定した第1の探索範囲内の画像に対してテンプレートマッチング処理を行い、追尾被写体位置を特定する第1の追尾手段12と、入力画像内に設定した第2の探索範囲内の画像に対してラベリング処理を行い、追尾被写体位置を特定する第2の追尾手段14と、を備え、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値未満である場合には、第1の追尾手段12または第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定し、第1の追尾手段12が特定した追尾被写体位置と、第2の追尾手段14が特定した追尾被写体位置との距離が所定値以上である場合には、第2の追尾手段14が特定した追尾被写体位置を用いて次回の第1の探索範囲を設定する。
(もっと読む)
撮像装置及びその制御方法
【課題】 焦点検出領域のデフォーカス量の情報を用いた露出量の演算を改善する。
【解決手段】
平均測光値と、デフォーカス量に応じた重み付けを行って得られる重み付け測光値とを用いて露出制御値の算出を行う。そして、平均測光値が重み付け測光値より所定値を超えて大きく、かつ撮影時にフラッシュを発光する場合には、そうでない場合よりも、重み付け測光値に係る重みを減少させる。
(もっと読む)
撮像装置、及びその制御方法
【課題】被写体の色を利用して露出制御を行う際に、光源の誤検出に起因する悪影響を低減する。
【解決手段】被写体を撮像して画像データを生成する撮像手段と、前記画像データに基づいて、前記被写体の光源色及び輝度を判定する判定手段と、前記判定手段により判定された光源色に基づいて、前記画像データにおいて特定の色の被写体が含まれる領域を検出する第1検出手段と、前記判定手段による判定とは無関係に予め定められた光源色に基づいて、前記画像データにおいて前記特定の色の被写体が含まれる領域を検出する第2検出手段と、前記第1検出手段の検出結果、及び前記第2検出手段の検出結果に基づいて、前記撮像手段の露出制御を行う制御手段と、を備え、前記制御手段は、前記判定手段により判定された前記被写体の輝度に基づき、前記予め定められた光源色が前記被写体の光源色である可能性が高いほど、前記第2検出手段の検出結果の重み付けを大きくして、前記露出制御を行うことを特徴とする撮像装置を提供する。
(もっと読む)
画像生成装置、画像生成方法、撮像装置、および撮像方法
【課題】少ない枚数の撮影画像からヒストグラムを作成して特異値を除去することができる画像生成装置、画像生成方法、撮像装置、および撮像方法を提供する。
【解決手段】それぞれの入力画像内の各位置のデータ毎に、他の入力画像内の同一位置のデータ値の中から最も近い値の最近接値を探索する最近接値探索部と、各位置のデータ毎に、データ値と対応する最近接値との差を取った値の絶対値である差分絶対値を算出する差分算出部と、全入力画像の同一位置毎に、対応する全最近接値に基づいたヒストグラムを生成するヒストグラム生成部と、同一位置毎に、対応する全最近接値と差分絶対値とに基づいて、同一の最近接値のデータに対応する差分絶対値の和を算出する差分和算出部と、ヒストグラムと差分絶対値の和とに基づいて、同一位置のデータに対応した1つの最近接値を選択し、出力画像の同一位置のデータ値として出力する最頻値検出部と、を備える。
(もっと読む)
画像処理装置および方法、プログラム、並びに記録媒体
【課題】照度変化に対しても高品質なノイズ低減画像を生成する。
【解決手段】ローカル動き補償処理部は、基準画像および参照画像から、画像を構成するブロック単位の動きベクトルであるローカル動きベクトルを検出し、ローカル動きベクトルを用いて参照画像の動き補償を行うことで、ローカル動き補償画像を生成し、グローバル動き補償処理部は、ローカル動きベクトルを用いて、基準画像と参照画像との間の画像単位の動きベクトルであるグローバル動きベクトルを算出し、グローバル動きベクトルを用いて参照画像の動き補償を行うことでグローバル動き補償画像を生成し、ブレンド処理部は、画像の輝度値に対するノイズ強度に応じて、ローカル動き補償画像の画素の画素値と、グローバル動き補償画像の画素の画素値とを合成することでブレンド動き補償画像を生成する。本技術は、画像処理装置に適用することができる。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び撮像装置
【課題】奥行方向の撮影範囲を制限することにより奥行方向の撮影範囲を任意に調整できる。
【解決手段】撮像して第1の画像を生成する撮像部と、前記撮像部から被撮像体までの距離を算出する距離情報算出部と、前記距離に基づいて、前記第1の画像から第1の領域における被写体と第2の領域における被写体とを分割する撮影範囲限定部と、を備える。
(もっと読む)
撮像装置及びその制御方法
【課題】ストロボを用いて撮影された撮影画像において、当該ストロボによる局所的な配向ムラを取り除けるようにする。
【解決手段】ストロボ111から被写体に向けて閃光を発し、撮像素子103において、被写体の撮影に係る第1の画像(撮影画像)を取得すると共に、被写体の距離分布を測距するための第2の画像を取得する。瞳分割画像位相差測距部106では、第2の画像に基づいて、第1の画像における各画像領域ごとに、被写体との距離を測距する処理を行う。そして、補正部113では、瞳分割画像位相差測距部106で測距された各画像領域ごとの被写体の距離と、ストロボ配光特性記憶部112に記憶されているストロボ配光特性とを用いて、第1の画像の補正処理を行う。
(もっと読む)
撮像装置
【課題】予備発光時の測光結果と、定常光の測光結果とがノイズレベルに相当するほど小さい値の場合であっても、本発光量の演算精度の低下を防ぐ。
【解決手段】撮像装置は、閃光装置の予備発光と、本発光とを制御する発光制御手段と、被写体からの光を測光する測光手段と、予備発光時に被写体からの反射光を測光させる第1測光と、予備発光の直前または直後に、被写体の定常光を測光させる第2測光とを行わせる測光制御手段と、第2測光による測光結果が第1閾値より低いか否かを判定する判定手段と、第1測光時に出力された信号の出力値から第2測光時に出力された信号の出力値を減算した結果に基づいて、本発光量を算出する算出手段とを備え、算出手段は、第2測光による測光結果が第1閾値より低い場合に、第1測光による測光結果を用いて閃光装置の本発光量を算出する。
(もっと読む)
カメラ
【課題】測光素子の測光信号を用いる複数の機能ごとに適した位置ずれ補正を行うこと。
【解決手段】カメラは、被写体光を測光し、測光信号を出力する測光素子13と、測光信号に対して、記憶部42に記憶された測光素子13の所定位置からの位置ずれ量データを用いて測光素子13の位置ずれを補正する位置ずれ補正処理を行い、位置ずれ補正処理後の測光信号を用いて、撮影条件の設定に関連する機能のうちの少なくとも二つの機能を実行可能な実行部31、32、33と、を備え、実行部31、32、33は、機能ごとに異なる位置ずれ補正処理を行う。
(もっと読む)
カメラ
【課題】測光素子からの画像データを複数の機能に用いる場合に、機能ごとに演算負荷を適正化すること。
【解決手段】カメラは、被写体像を撮像して、所定の画素数の画像データを出力する測光素子13と、撮影条件の設定に関連する機能のうちの少なくとも二つの機能を実行可能な実行部64、65、69と、該画像データを、複数の画素を含み、且つ該機能ごとに異なるサイズのブロックに区分した画像データに変換する変換部51、52、54と、を備え、実行部64、65、69は、該ブロックに区分された画像データを用いて該機能を実行する。
(もっと読む)
撮像装置及び撮像方法
【課題】フラッシュ撮影時に顔が露出オーバーになるのを防ぐ。
【解決手段】一眼レフ型電子カメラ10は、フラッシュ撮影時に本発光の前に予備発光を行う。測光部32は、被写体の反射光を測光して測光信号を送出する。顔検出部36は、測光信号に基づいて顔画像領域を検出する。測光値算出部38は、予備発光時に測光手段から得られる予備発光測光信号を用いて、予備発光前に顔検出部36が検出した顔画像領域の測光値、及び測光領域全体の全画面予備発光測光値をそれぞれ算出する。制御部41は、前記顔画像領域の測光値から定常光成分を除去した第1測光値と、全画面予備発光測光値から定常光成分を除去した第2測光値とを求め、求めた第1及び第2測光値とに基づいて本発光時の発光量を演算する。
(もっと読む)
撮像装置、その制御方法、および制御プログラム
【課題】撮影シーンによらず適切に被写体領域の決定を行うことができるようにする。
【解決手段】シーン判別部103は所定の判別条件に応じて画像データを得た撮影シーンが所定のシーンであるか否かを判別する。第1の領域抽出部104は画像データが示す画像を分割して得られた複数の領域から、シーン判別部103がシーン判別に用いた第1の項目に基づいて第1の領域を抽出する。第2の領域抽出部105は複数の領域から第1の項目とは異なる第2の項目に基づいて第2の領域を抽出する。被写体領域決定部106は撮影シーンが所定のシーンであると判別されると、第1の領域を被写体領域とし、撮影シーンが所定のシーンでないと判別されると、第2の抽出領域を被写体領域とする。
(もっと読む)
1 - 20 / 637
[ Back to top ]