
Fターム[5D042BA07]の内容
磁気ヘッドの位置調整、追随 (3,641) | ヘッドの調整方向 (60) | トラック幅方向への移動 (31)
Fターム[5D042BA07]に分類される特許
1 - 20 / 31
磁気ヘッドのトラッキング制御方法、サーボ信号検査方法、磁気テープドライブおよびサーボライタ
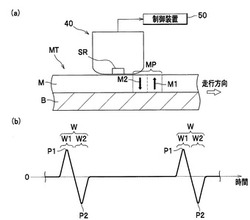
【課題】サーボ信号書込時の磁気テープの走行方向のゆらぎの影響を抑える。
【解決手段】磁気テープMTの厚み方向において一方向に磁化した後側成分M2と一方向とは逆方向に磁化した前側成分M1とからなる磁気パターンMPを磁気テープMTの走行方向に所定間隔で繰り返すサーボ信号が予め書き込まれた垂直磁気記録方式の磁気テープMTに対する磁気ヘッドのトラッキング制御方法である。磁気ヘッドのトラッキング制御方法は、サーボ信号を読み取って、磁気パターンMPに対応した互いに逆極性の一対のピークP1,P2を有する単位波形Wを繰り返すサーボ信号の波形を取得する波形取得工程と、取得したサーボ信号の波形を構成する各単位波形Wから、サーボ信号が書き込まれたときの磁気テープMTの走行方向における後側のピークP2を含む谷形の波形を選択する波形選択工程と、選択した波形に基づいて磁気ヘッドの位置を制御する位置制御工程と、を有する。
(もっと読む)
磁気テープ

【課題】高速かつ高精度にトラッキングサーボを行うことができるサーボ信号が書き込まれた、磁気テープを提供する。
【解決手段】少なくとも2本のサーボトラックを有し、一方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ供給側に記録され、他方のサーボトラックに、テープ変動情報を含むサーボ信号が磁気テープ上の所定位置よりもテープ巻き取り側に記録される。
(もっと読む)
磁気テープ
【課題】温度や湿度などによって変形したとしても、磁気ヘッドの追従を安定して行うことができる磁気テープを提供する。
【解決手段】データ信号を記録可能な複数のデータバンド3、4、12を備えた磁気テープであって、バースト信号で構成されたサーボパターン15を備え、前記サーボパターンは前記複数のデータバンドのうちの一つのデータバンド12において、当該磁気テープの長手方向に、所定間隔毎に形成されている。
(もっと読む)
サーボ・トラックのゼロ基準に対するスキュー・アクチュエータによるサーボ検出方法、及びそのシステム
【課題】 長手テープのサーボ・トラックを検出するための方法、サーボ・システム、サーボ検出システム、及びデータ・ストレージ・ドライブを提供すること。
【解決手段】 長手テープのサーボ・トラックを検出するためのサーボ検出システム。読み取り/書き込みヘッドにおいて、2つのサーボ読み取りヘッドが第1のヘッド・モジュール上で横方向に離間され、第1のモジュールから長手方向に離間された第2のヘッド・モジュール上の1つのサーボ読み取りヘッドが存在する。方法は、最初に第1のモジュールの1つのサーボ読み取りヘッド及び第2のモジュールのサーボ読み取りヘッドを用いてテープのサーボ・トラックを検知し、サーボ・トラックのスキューずれを判定することを含む。判定されたスキューずれを表すゼロ基準値が格納される。検出システムは、各モジュールの1つのサーボ読み取りヘッドから、第1のモジュールの2つのサーボ読み取りヘッドに切り換え、格納された値を用いて、読み取り/書き込みヘッドをゼロ・スキュー位置に位置決めする。次いで2つのサーボ読み取りヘッドを用いて2つのサーボ・トラックを読み取り、データバンドの識別及びスキューの制御を行う。
(もっと読む)
ヘッドスライダ及び磁気ディスク装置
【課題】媒体対向面の変形を抑制することが可能なヘッドスライダを提供する。
【解決手段】回転するディスク媒体上に浮上するヘッドスライダであって、データの書き込み及び読み出しを行う記録再生ヘッド21と、前記記録再生ヘッドから、前記ディスク媒体の周方向に対応する第1の方向および径方向に対応する第2の方向の少なくとも一方に離れて配置される発熱素子30と、少なくとも前記記録再生ヘッドと前記発熱素子との間に介在し、前記発熱素子の発熱に応じて膨張する膨張部材と、を含み、前記発熱素子の、当該ヘッドスライダの浮上方向に対応する第3の方向の幅が、前記第1の方向の幅および前記第2の方向の幅よりも小さい。
(もっと読む)
複数のテープフォーマットとの互換性を有する磁気テープドライブ及び磁気テープヘッド
本発明の実施形態は、現行の磁気テープフォーマット(1820)並びに1つ又は2つ以上の以前の磁気テープフォーマット(1802,1804)との読み出し/書き込み上の互換性を揺する後方互換磁気テープドライブ(102)の設計及び実施に関するものである。本発明の実施形態は、異なるフォーマットに従ってフォーマットされた磁気テープに対して磁気テープドライブが読み出し及び書き込みを行うことを可能にするリード/ライトテープヘッド構成(1902,1904,1906,1908-1923,1930,1932,1934,2102)及びそれに対応する磁気テープドライブ構成要素(518)を含む。 (もっと読む)
サーボ信号記録装置、磁気テープ装置、磁気テープ
【課題】サーボ信号のS/N比を向上させて、磁気ヘッドのサーボ制御の精度を向上させる。また、磁気テープの速度変動とLTMとを正確に判別する。
【解決手段】幅方向に磁化量が異なるサーボストライプを磁気テープに備えたことにより、磁気テープ装置(ドライブ)でトラッキングサーボを行う際、サーボストライプの磁化量の変化によりヘッドユニットに対する磁気テープの相対位置を検出することができる。よって、従来のようにサーボ信号のタイミングのみを検出してトラッキングサーボを行う構成に比べて、サーボ信号のS/N比を向上させることができ、より精密にサーボ制御を行うことができる。
(もっと読む)
磁気テープ
【課題】温度や湿度などによって変形したとしても、磁気ヘッドの追従を安定して行うことができる磁気テープを提供する。
【解決手段】データ信号を記録可能な複数のデータバンド22を備えた磁気テープであって、バースト信号で構成されたサーボパターン部15を備え、サーボパターン部15は、複数のデータバンド22〜24において磁気テープ21の長手方向に所定間隔毎に形成され、各データバンド22〜24に形成されるサーボパターン部15は、磁気テープ21の長手方向の位置を互いに異ならせて形成されている。
(もっと読む)
読み書きヘッドと可撓性データ記憶媒体との間の位置合わせ不良を調整するためのシステム
【課題】 読み書きヘッド(10)と可撓性データ記憶媒体(66)との間の位置合わせ不良を調整するためのシステムを提供する。
【解決手段】 このシステムは、ヘッド・キャリッジ・アセンブリ(52)と、ヘッド・キャリッジ・アセンブリをピボット運動可能に支持するピボット部材(68)を含むリニア・アセンブリ(54)と、ヘッド・キャリッジ・アセンブリに結合された磁気アセンブリ(56)とを含む。ヘッド・キャリッジ・アセンブリを横切る媒体移動方向に対してヘッド・キャリッジ・アセンブリを動的に位置決めするために、電流が磁気アセンブリに流される。ヘッド・キャリッジ・アセンブリを横切って移動する媒体のトラック追従のために、第1の電流が磁気アセンブリに流される。ヘッド・キャリッジ・アセンブリを動的に回転位置決めし、ヘッド・キャリッジ・アセンブリを横切って移動する可撓性媒体の傾斜を補償するために、第2の電流が磁気アセンブリに流される。
(もっと読む)
磁気テープ、磁気テープカートリッジ、磁気テープドライブ、磁気ヘッドのトラッキング制御方法およびサーボライタ
【課題】磁気テープにおいて、高速応答を可能にするとともに、磁気テープの記録面を有効に利用して大記憶容量化が可能にする。
【解決手段】テープTの幅方向に山形または谷形の信号強度分布を有するサーボトラックSTを少なくとも一つ備えて磁気テープMTを構成する。サーボトラックSTは、例えば、幅方向に向いた磁気モーメント41が一つ配置されるように構成される。そして、サーボトラックSTの幅よりも小さい読取幅を有する誘導型のサーボ信号読取素子SRa,SRbによりサーボトラックSTからサーボ信号を読み取り、このサーボ信号の出力に応じて磁気ヘッドHをトラッキング制御する。
(もっと読む)
データをテープ状データ担体上に記録する方法及び磁気テープ
【課題】トラッキングの質を損なわずに、磁気テープ上の有効データの高い密度を提供することができる記録方法を提供すること。
【解決手段】書込ヘッドを用いて、複数のデータトラックをデータ担体上に同時に記録し、データトラックを順次連続してデータ部分に区分し、データ部分を、それぞれ1つの始端領域及び1つの有効領域に分割し、複数のデータトラックのうちの少なくとも1つを、書込ヘッド又はヘッドユニットのトラッキングコントロール用の1次コントロールトラックとして使用し、各データ部分の始端領域内に、少なくとも1つの第2のコントロールトラックを記録し、該コントロールトラックを、データ部分の有効領域全体に亘っては延在させない。
(もっと読む)
磁気テープ装置
【課題】摩擦係数の高い磁気テープであっても、磁気ヘッドの幅方向の動きに追従して動くことがなく、トラッキング精度が優れた磁気テープ装置を提供する。
【解決手段】磁気テープ5に対して情報を記録または再生可能な磁気素子8及び9を備えた磁気ヘッドユニット1は、磁気素子を備え磁気テープ5の幅方向全域に当接可能な大きさを有し磁気テープ5の幅方向に移動可能に配されている可動部材2と、可動部材2における磁気テープ搬送方向に隣接した位置に配された固定部材3とを備え、可動部材2は、トラッキングサーボ制御時に、トラッキングサーボ機構によって磁気テープ5の幅方向に移動される。
(もっと読む)
磁気テープ装置
【課題】摩擦係数の高い磁気テープであっても、磁気ヘッドの幅方向の動きに追従して動くことがなく、トラッキング精度が優れた磁気テープ装置を提供する。
【解決手段】磁気テープ5に対して情報を記録または再生可能な磁気素子8及び9を備えた磁気ヘッドユニット1は、磁気素子を備え磁気テープ5の幅方向全域に当接可能な大きさを有し磁気テープ5の幅方向に移動可能に配されている可動部材2と、可動部材2における磁気テープ搬送方向に隣接した位置に配された固定部材3とを備え、可動部材2は、トラッキングサーボ制御時に、トラッキングサーボ機構によって磁気テープ5の幅方向に移動される。
(もっと読む)
磁気媒体に長手方向のサーボトラックを書込むための機器
【課題】高精度の磁気テープなどの記録媒体上にサーボ信号を記録することを容易にする方法、機器およびシステムを与える。
【解決手段】フレーム間およびイントラフレームの配置の変動は、以前に書込まれたフレームまたはサブフレームの読取り要素による検出に基づいて、連続したフレームまたはサブフレームを書込むことによって実質的に減じられる。サーボ書込み要素に対するマルチギャップサーボ書込みヘッド上の読取り要素の適切な配置により、記録媒体上の連続したフレームの正確な配置を確実になる。
(もっと読む)
ヘッドトラッキングサーボ方法、記録再生装置、磁気テープ、および磁気テープカートリッジ
【課題】記録トラック幅が狭くなり、テープ速度が速くなった場合においても、磁気ヘッドを記録トラックに高速かつ正確に追従させることができるヘッドトラッキングサーボ方法を提供する。
【解決手段】カートリッジ20と磁気テープ21とからなり、予め測定により得られた磁気テープ21の長さ方向の各位置についての磁気テープ幅方向の位置の変動量の情報であるテープ変動情報を周波数変換したLTM周波数情報が記録された磁気テープカートリッジ23を用い、磁気テープカートリッジ23側からLTM周波数情報を読み出し、サーボトラックに記録されているサーボ信号を磁気ヘッドで読み出して、磁気テープ21に対する相対的なヘッド位置の情報を抽出して、オフトラック量を算出し、LTM周波数情報とオフトラック量とから磁気ヘッドの制御データを算出し、算出した制御データに基づき磁気ヘッドを磁気テープの幅方向へ移動させるものである。
(もっと読む)
VCM機構を有する磁気ヘッド試験用スピンドルステージおよび磁気ヘッド自動着脱装置
【課題】ピエゾ素子を使用せずに、安価なVCM機構により高精度なサーボフォローイングが可能な磁気ヘッド試験用スピンドルステージおよび磁気ヘッドを自動着脱できる磁気ヘッド自動着脱装置を提供する。
【解決手段】VCM機構により揺動駆動されるヘッドアーム部を有するヘッドアーム装置と、該ヘッドアーム部に装着されたHGAを回転するメディアの表面に対してロードして電気的、機械的な特性を測定する磁気ヘッド試験用スピンドルステージであって、前記ヘッドアーム部に、前記HGAのスウエッジ用ボスが着脱自在に嵌る嵌合部と、スウエッジ用ボスが前記嵌合部に嵌った前記HGAを係止する係止位置と、前記スウエッジ用ボスを前記嵌合部に自在に着脱できる解放位置とに移動するクランプ部材を備えた。
(もっと読む)
磁気テープ記録再生装置の記録ヘッドの調整方法及び磁気テープ記録再生装置
【課題】 磁気記録再生装置のn個の回転記録ヘッドで、狭小・均等なトラックを自己形成できる調整方法を得る。
【解決手段】 記録可能としたテープ10に、n個(i=1〜n)のうちの1つの記録ヘッドHWiにより計測信号と消去信号を各々隣接するトラックに記録する処理をn個の記録ヘッドについて行うと共に、標準動作状態でn個の記録ヘッドHW1〜HWnにより計測信号をn本のトラックに略同時に記録する。そして、得られた2種のトラックについて再生ヘッドをトラック幅の方向に変位させ、トラックのずれ(オフトラック)量に対する計測信号の再生信号波形振幅の特性曲線を得、この特性曲線の半値幅を便宜的にトラックの幅とし、2種のトラックの各々からその幅に対応する変数Rioptimumと変数Rinowを得る。そして、この変数Rioptimumに対する変数Rinowの偏差が所望値より小さくなるように記録ヘッドHWiの位置をアクチュエータで調節するようにした。
(もっと読む)
リニアテープドライブのサーボ装置
【課題】 二次の共振周波数を飛躍的に上げ、位相進み補償を可能にして、サーボ帯域を一次共振周波数を超え現状の数倍に上げ、トラッキング密度の大幅な向上を可能ならしめたリニアテープドライブのサーボ装置を提供する。
【解決手段】 複数の磁気ヘッド素子がトラック幅方向に配列された磁気ヘッドチップ112と、磁気ヘッドチップ112のトラック幅方向両端に対向配設され、各一端が固定された1対のバイモルフ素子114を有した第1の微動追従機構113と、同様に構成した第2の微動追従機構213とを備え、前記2対のバイモルフ素子114、214の各変位端を、前記磁気ヘッドチップ112のトラック幅方向両端にチップベース115、215を介して連結し、前記第1の微動追従機構113のバイモルフ素子114の変位端および固定端を結ぶ線が、第2の微動追従機構213側のそれと直交又は略直交するように配設する。
(もっと読む)
磁気記録再生装置のトラック再生方法及び磁気記録再生装置
【課題】 磁気テープの曲ったトラックの再生のときのアクチュエータによるMRヘッドの追従制御を、ユーザーデータ領域をあまり使用せず行なう。
【解決手段】 MR(磁気抵抗効果型)ヘッドによる再生ヘッドHRが設けられた磁気記録再生装置1で、伝送をパーシャル・レスポンス・クラス1で行ない、ユーザーデータの再生ヘッドHRによる再生波形のアイパターンを得ると共に、このアイパターンの検出点での最大値,中央値,最小値の3値を得る。そして、MRヘッドによる出力波形でのアシンメトリの特性値Qを、A=最大値−中央値、B=中央値−最小値としてAとBから例えば((A−B)/(A+B))×100として算出する。そして、再生ヘッドHRがオントラック走行でQ=0、オフトラック走行でQ≠0となりオントラック位置からずれる方向によりQの符号が異なることを用いて、再生動作中にオントラック走行する方向にアクチュエータで再生ヘッドHRを駆動して曲ったトラックに追従させるようにした。
(もっと読む)
ディスクドライブ装置用のマイクロアクチュエータ及びヘッドジンバルアセンブリ
【課題】 記録・再生ヘッドの位置調整を正確に行うことができるマイクロアクチュエータを提供する。
【解決手段】 本発明のマイクロアクチュエータ212は金属フレーム252を含み、該金属フレーム252は、ヘッドジンバルアセンブリのサスペンション216に連結されている底支持板256と、ヘッドジンバルアセンブリのスライダ214を支持する頂支持板254と、底支持板256と頂支持板254をお互いに連結する一対のサイドアーム258、259と、を含む構成である。サイドアーム258、259は、底支持板256と頂支持板254のそれぞれの側辺から直交するように延在している。各サイドアームには圧電素子242,243が装着されている。また、各圧電素子242,243は複数の圧電部260,262を含み、各圧電素子242,243の通電によりサイドアーム258,259を選択的に移動させる。
(もっと読む)
1 - 20 / 31
[ Back to top ]