
Fターム[5G046AC34]の内容
磁界電界応動スイッチ (4,887) | 検出手段 (853) | 抵抗の変化を用いるもの (45) | 検出抵抗 (24) | 電極と接地間の抵抗 (12)
Fターム[5G046AC34]に分類される特許
1 - 12 / 12
タッチスイッチ
【課題】指先の操作面に対する当接面積の変化に対して、検出精度の低下が抑制されるようにした、新規な構造のタッチスイッチを提供すること。
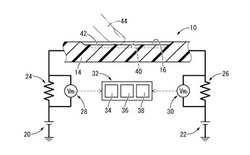
【解決手段】導電部材14に対して電圧が印加されており、導電部材14における通電状態に基づいて手指44の導電部材14上での接触の有無および接触しながらの移動を検出するタッチスイッチ10において、手指44が接触する導電部材14の操作面16を、手指44の先端部分よりも狭幅の所定幅寸法で延びる帯状とした。
(もっと読む)
タッチスイッチ

【課題】使用者の意識的な操作を妨げることなく、意図しない接触による入力を防止することができる、新規な構造のタッチスイッチを提供する。
【解決手段】導電部材18に対して複数箇所から電圧が印加されており、導電部材18における通電状態に基づいて被検出導電体56の導電部材18への接触の有無と接触位置を検出するタッチスイッチ10において、導電性の接触確認部材20を設けて、導電部材18に電圧を印加する電源28,34の接地側電極36を接触確認部材20に接続し、接触確認部材20に対する導電部材18の導通状態下で被検出導電体56の導電部材18への接触の有無と接触位置を検出する。
(もっと読む)
保護パネル及び電子機器
【課題】表面側基板のスイッチ部が経時的に大きく凹むことがなく、外観の劣化を防止することができ、接点の耐久性が問題とならない、保護パネル及び電子機器を提供する。
【解決手段】周辺スイッチ用上部電極6Gと周辺スイッチ用下部電極5Gとに接触するとともに基材用接着層17の貫通孔10内に感圧導電部材25を配置し、周辺スイッチ12に作用する力が、上部電極基材と上部電極とを介して感圧導電部材に伝達され、電流が流れることにより上部電極と下部電極との間で導通が行われる。
(もっと読む)
接触検出装置および接触検出装置を適用したロボットシステム
【課題】ノイズに強く、アプリケーションに応じて接触検出器の数の増減が容易で、接触位置も特定可能な接触検出装置を提供する。
【解決手段】 2接点スイッチと抵抗値のそれぞれ異なる抵抗器から構成される複数の接触検出器を、リファレンス電源線、アース線および信号線からなる接続ケーブルで信号処理部に接続する。信号線には接触有無と接触時のその位置を表す信号が検出され、この信号から信号処理部で接触状態と接触位置を判別し検出する。また、この接触検出装置をロボットの腕、胴、頭など各部位に装着しその接触状態を検出する。
(もっと読む)
抵抗シート、感圧スイッチおよびそれを用いた入力装置
【課題】各種電子機器の操作に用いられる感圧スイッチに関し、押圧力を検出すると共に高精度に押圧方向を検出しうる抵抗シート、感圧スイッチおよびそれを用いた入力装置を提供することを目的とする。
【解決手段】感圧スイッチの抵抗体層に接続された端子を定圧電源に接続し、感圧スイッチの電極に接続された端子を前記制御手段に接続し、制御手段は前記抵抗体層を押圧した押圧方向を、制御手段に感圧スイッチの電極を介して入力された入力電圧に基づいて推定するものであり、操作者が押圧する方向の変化に従って変化する所定の電圧分布を抵抗体層に生じさせるため、操作者の押圧方向検出を高精度に行うことができ、押圧方向検出に好適な抵抗シート、感圧スイッチおよびそれを用いた入力装置を得ることができる。
(もっと読む)
スライド操作装置
【課題】操作子に加わる静電気の放電経路を確保しつつ、操作されている操作子を認識するタッチセンス機能を実現する。
【解決手段】金属製のメインケース10は、ミキサ装置を通じて接地状態となる。移動体70は、ゴンドラ71に操作子80が固定されてなる。メインケース10内において、ゴンドラ71が、上側ガイドバー78及び下側ガイドバー79に対して摺動自在になっている。摺接用組体60の板バネ61は、操作子80の導電メッキ部28、摘み部81及び固定部82に対して電気的に導通状態にあって且つ接地されていない。移動体70の移動全行程において、摺接用組体60の絶縁シート64が下側ガイドバー79に対して摺接関係となって、板バネ61が、絶縁シート64の厚み分の間隔を保って常時近接し、絶縁シート64の貫通穴65が、操作子80に加わる静電気の放電経路となる。
(もっと読む)
タッチスイッチ装置、照明装置、及びキッチンユニット
【課題】水分が付着しても誤動作が生じにくいタッチスイッチ装置を提供する。
【解決手段】接触電極7がその表面7aを露出させて本体部材5の取付部に取り付けられている。この接触電極7における電気信号に起因して制御手段はオン・オフ信号を切り換えて出力する。接触電極7と前記取付部との間に座部材9が介在しており、座部材9は接触電極7の表面7aと取付部の表面6aとの間に跨る水膜の形成を抑制する。
(もっと読む)
ロータリーエンコーダー及びタッチセンサー付き回転操作ノブ
【課題】 回転操作ノブへの操作を途中無接点にて電気的に外部に出力することができる、耐久性及び信頼性に優れたロータリーエンコーダー及びタッチセンサー付き回転操作ノブを提供することを課題とする。
【解決手段】 ホルダー10に回動可能に保持される回転操作ノブ14と、回転操作ノブ14を操作する人の手指が接触する位置に設けられた接触電極55と、接触電極55に接続されて回転操作ノブ14の回転操作に応じて移動する可動電極52と、可動電極52の移動軌跡に対向して可動電極52から離間して複数設けられた固定電極22と、接触電極55を通じて人体に接続された可動電極52の移動による接近によって各固定電極22に現れる電気的変化を検出する人体検知手段81、82とを設けた。
(もっと読む)
タッチキーとこれを用いた家電機器
【課題】感度変動なく安定確実に動作するタッチキーを提供することを目的とする。
【解決手段】入力条件に応じて変化する基準電圧を出力する基準電圧設定部7を有しているものである。これによって、検知感度を変える各種要因に応じて基準電圧を変化させるため、感度が高い場合には基準電圧を高くして、より大きな電圧変化がないとタッチしたと判定せず、また感度が低い場合には基準電圧を低くしてより小さな電圧変化でもタッチしたと判定することができる。したがって、感度変動なく安定確実に動作するものである。
(もっと読む)
電子機器
【課題】 少ないキースペースで、焦点合わせと撮像動作を実施する入力部を搭載する。
【解決手段】
筐体120の背面に背面電極59を設けると共に、テンキーを配置した面に、表面が導電性のシャッターボタンを設け、制御回路が、前記背面電極59とシャッターボタンの表面がグランドに落ちたと判定すると、焦点合わせの動作を行い、続いてシャッターボタンが押下されたと判定すると、撮像動作を実行する。
(もっと読む)
接触・非接触一体型コードスイッチ
【課題】信頼性の面で優れている接触型の検知機能も保持しつつ、物体が接触する前に検知できる非接触型の検知機能も併せ持つ接触・非接触一体型の検知装置を提供する。
【解決手段】空隙5を有する断面中空絶縁体3の内面に沿って、2本の電極線1,1を所定の間隔を保ちながら長手方向に螺旋状に配置すると共に、断面中空絶縁体3の外周に導電層7を被覆し、かつ導電層7の端部の2箇所にスリット9,9を設けてコードスイッチ10とする。
(もっと読む)
タッチセンサ
【課題】タッチセンサのタッチ電極が金属のために触れると冷たい、感触が固いという課題を解決する手段を提供する。
【解決手段】タッチセンサ回路10aのタッチ部電極1aを導電糸を用いた導電布、導電繊維糸を用いた導電繊維布または導電繊維糸を用いた導電繊維編地などで構成する。人が触れるとタッチ部電極1aの大地間静電容量が増加し、タッチセンサ回路10aがこの容量変化によって負荷11への出力をオン・オフしてタッチ部電極1aへの接触を検出する。タッチ部電極1aの材料は金属に比べてソフトであり、また熱伝導率も低く、さわっても冷たく感じない。
(もっと読む)
1 - 12 / 12
[ Back to top ]