
Fターム[5H004GA12]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 信号の急変防止 (14)
Fターム[5H004GA12]に分類される特許
1 - 14 / 14
制御装置及び制御方法
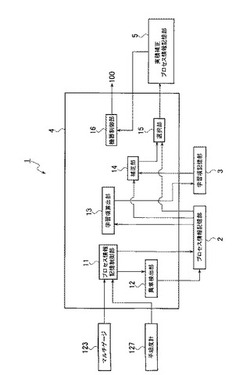
【課題】一方の測定器から他方の測定器へ切り替えられた場合においても、測定値を突然変化させることなく熱間圧延装置の制御を適切に継続する。
【解決手段】第1のプロセス値として測定するマルチゲージ123(第1の測定部)と、第2のプロセス値として測定する平坦度計127(第2の測定部)と、マルチゲージ123(第1の測定部)の異常を検出する異常検出部12と、プロセス情報を記憶するプロセス情報記憶部2と、第2のプロセス値を補正するための学習項Zを算出する学習項算出部13と、学習項Zを記憶する学習項記憶部3と、補正板幅値(補正プロセス値)を生成する補正部14と、異常が検出された時点以前における第1のプロセス値と、異常が検出された時点以降における補正板幅値(補正プロセス値)とを選択する選択部15と、選択されたプロセス値及び補正プロセス値に基づいて、圧延ラインの制御を行う機器制御部16とを備える。
(もっと読む)
初期化操作方法

【課題】目標操作量まで滑らかに変化するように接続できるとともに応答性を改善し得る初期化操作方法を提供する。
【解決手段】積分器3からの出力が比例成分項を含む多項式で表わされる制御器1を用いて制御を開始する際、その時点での目標値rと制御量yとの差である制御偏差を無くすようにする初期化操作方法であって、初期化時に、多項式の内、少なくとも1つの比例成分項を積分バイアス量xbとして分離し、独立した式として設定することを特徴とする。
(もっと読む)
PID制御器のモード切替装置
【課題】PID制御器の動作モードを手動モード及び自動モードに切り替える場合、モードの切替によって発生する衝撃を除去し、安定してモードを切り替えることができるPID制御器のモード切替装置を提供すること。
【解決手段】本発明は、手動モード切替信号及び自動モード切替信号に応じて、自動モード及び手動モードのPID演算を行って、駆動信号を発生するPID演算部、前記手動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を処理して、負荷駆動機に出力する手動モード緩衝部、及び、前記自動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を分析して、前記PID演算部に出力する速度差積分信号計算部を含む。
(もっと読む)
制御スケジューリング・システム及び方法
【課題】異なった制御モード間で円滑な変更を行う。
【解決手段】装置の第1の作動モードと第2の作動モードとの間で装置の制御を変更するシステムにおいて、装置を第1の作動モードで制御するための制御信号を生成するための第1の作動モードと関連した利得係数を利用し、且つ装置を第2の作動モードで制御するための制御信号を生成するための第2の作動モードと関連した利得係数を利用する制御ループと、装置が第1の作動モードから第2の作動モードに移行するとほぼ同時に第2の作動モードと関連した利得係数を用いて制御ループを動作させる利得セレクタと、モードの変化中に、制御信号における突然の変化を最小化するスムーザとを備える、システム。
(もっと読む)
パラメータ決定装置及び方法並びにプログラム
【課題】制御器の切替時において、切替後の制御の特徴を調整すること。
【解決手段】複数の制御器を備えるシステムにおいて、処理を行う制御器を切り替える場合に、切替後の制御器で用いるパラメータを決定するパラメータ決定装置13であって、異なる特徴を有する複数の演算式の組み合わせからなるとともに、異なる特徴の重みづけを変更可能とするパラメータ算出演算式を備え、パラメータ算出演算式の重み付けを切り替え前の制御器の状態に応じて決定し、決定した重み付けが与えられたパラメータ算出演算式を用いて切替後の制御器におけるパラメータを決定する。
(もっと読む)
電空コントローラにおいて駆動値の変更を制限する方法および装置
電空コントローラにおいて駆動値の変更を制限する例示の方法および装置が開示される。開示する例示の方法は、制御信号およびフィードバック信号を受信することと、制御信号およびフィードバック信号から駆動値を算出することと、駆動値と以前の駆動値との差異が電空コントローラのスルー限界よりも大きいか否かを決定することと、スルー限界に基づいて算出された駆動値を変更することとを含む。 (もっと読む)
プラント制御装置及び方法
【課題】複数の操作対象を個別に手動操作できると共に、操作対象へ出力される操作量の突変を防止するトラッキングを廃止してコストを低減できること。
【解決手段】プラントのプロセス値PVと制御設定値SVとの制御偏差eを入力し、操作弁A、Bに対する操作量偏差ΔMVを演算する速度型PID制御手段13と、この速度型PID制御手段からの操作量偏差を各操作弁側へ切り換えて出力する切換手段14と、各操作弁に対応して複数設けられ、操作弁の制御モードに基づき、切換手段から出力された操作量偏差を積分して算出した操作量MV−A、MV−B、及び手動設定された値に基づく操作量MV−A、MV−Bのいずれか一方を、対応する操作弁へ出力する積分機能付手動操作手段15、16と、各操作弁の制御モード及び各操作弁へ出力される操作量に基づき、切換手段の動作を制御する切換制御手段19とを有する。
(もっと読む)
サーボモータの駆動制御装置及び駆動制御方法
【課題】少ないメモリのCPUでも学習制御を可能とし、さらに学習時間の短縮を実現可能なサーボモータの駆動制御装置を提供する。
【解決手段】駆動制御装置10は、位置ループ制御系に追加された学習制御部24を有し、学習制御部24は反転動作前後の所定時間に限って学習制御を行うように構成されている。学習制御によって得られる速度指令を解析して求められる速度補正データは、反転動作時に発生する位置偏差を低減すべく速度指令の補正を行うために使用される。
(もっと読む)
サーボ制御方法、サーボ制御装置
【課題】オープン制御から適応スライディングモード制御へと移行する際の制御性の悪化を回避する。
【解決手段】オープン制御から適応スライディングモード制御へと移行する際に、適応スライディングモードコントローラ51の制御入力を移行直前のオープンコントローラ52の制御入力に一致させるべく、適応スライディングモードコントローラ51の状態量を算定するようにした。
(もっと読む)
制御機器および制御方法
【課題】通常時は操作量の急変を抑制し、外乱抑制時などの緊急時には必要とされる操作量の急変を抑制しないようにする。
【解決手段】制御機器は、外部から入力された制御量目標値SPnの変化率の変化率を上限値と下限値の範囲内に制限する上下限処理を行い、上下限処理後の制御量目標値SPn’を算出する目標値変化量変化量制限部3と、算出された制御量目標値SPn’と制御量PVとの偏差に基づいて操作量MVを算出して制御対象に出力するPID制御演算部4とを備える。
(もっと読む)
ベルト駆動制御装置及び画像形成装置
【課題】無端状ベルトの回転むらを原因とする各色の位置ずれを防止することができるベルト駆動制御装置及び画像形成装置を提供する。
【解決手段】無端状ベルトの回転速度が目標速度となるように、規定の制御周期毎に、速度検出手段によって検出された無端状ベルトの速度に基づいて、ステッピングモータの単位時間当たりの駆動パルス数をフィードバック制御する回転制御手段を具備し、回転制御手段は、規定の制御周期毎にフィードバック制御するステッピングモータの単位時間当たりの駆動パルス数について、前回の単位時間当たりの駆動パルス数に対する今回の単位時間当たりの駆動パルス数の増減値である制御値を規定の範囲に制限する。
(もっと読む)
制御装置
【課題】制御対象の非線形特性および周波数特性の少なくとも一方が変化したときでも、制御分解能および制御精度をいずれも高いレベルに維持することができる制御装置を提供すること。
【解決手段】位相制御入力Ucainによりカム位相Cainを制御する制御装置1は、2つのコントローラ102,103を備える。2自由度応答指定型コントローラ102では、追従制御入力Rsldが、カム位相を目標カム位相Cain_cmdに追従させるように制御するための値として算出される。DSMコントローラ103では、追従制御入力Rsldを変調することにより、位相制御入力Ucainが算出されるとともに、その際、位相制御入力Ucainの演算周期が、エンジン回転数NE、カム位相CainおよびバルブリフトLiftinに応じて、2つの演算周期ΔT1,ΔT2の中から選択される。
(もっと読む)
制御装置
【課題】状態量差が小さくなるように制御する際に、操作量の飽和を緩和し、本来の目的である状態量差を小さくするという効果が損なわれることを回避する。
【解決手段】制御装置は、各制御ループの状態量計測値を状態量変換行列により各状態量計測値を線形結合した値に変換する状態量計測値変換部5と、変換された状態量計測値とこれに対応する状態量設定値との制御偏差に基づき各制御ループの操作量を算出するPID制御演算部6−1〜6−3と、算出されたn個の操作量を操作量変換行列により各制御ループに配分されるように変換する操作量変換部7と、状態量設定値に対して急変動を抑制するフィルタリング処理を施す状態量フィルタリング設定値算出部3−1〜3−3とを備える。
(もっと読む)
制御装置および制御方法
【課題】
制御対象の制御動作を継続している間に制御パラメータが急激に切り替えられた場合であっても、操作量(制御器出力)が適切に出力される制御装置および制御方法を提供する。
【解決手段】
目標値と初期状態量と制御パラメータとが供給され、前記目標値と前記制御パラメータと過去の制御器状態量に対応して現在の制御器状態量を計算する計算手段と、 前記現在の制御器状態量に基づいて操作量を決定し、前記操作量に基づいて制御対象を制御する制御器とを具備する制御装置を構成する。 ここで、前記計算手段は、前記制御パラメータが切替えられる条件にあてはまるかどうかを監視する。そして、切替条件にあてはまる場合は、制御パラメータを切り替えるとともに、切替え後の制御パラメータを用いて、制御器状態量を再計算する。そして、前記制御器は、その再計算された状態量を使用して操作量を計算する。
(もっと読む)
1 - 14 / 14
[ Back to top ]