
Fターム[5H004GA26]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | 人間の感覚に訴えるもの (16)
Fターム[5H004GA26]に分類される特許
1 - 16 / 16
多数の自由度系の思考可能なハンズフリー制御
スライディングモード制御装置及び車両の自動操舵制御装置
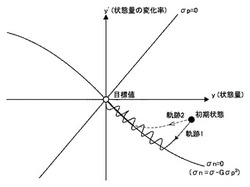
【課題】切り換え超平面への収束性を良好に維持しつつ、チャタリング現象を的確に低減することが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに状態量y及び状態量の時間変化率y’を収束させる。また、初期状態の制御対象の状態量y及び状態量の時間変化率y’の収束軌跡の傾きと切り換え超平面σnの傾きとの差が大きいほど値が大きくなるように境界層φを設定し、状態量y及び状態量の時間変化率y’を切り換え超平面σnに到達させるための非線形入力θnlを、境界層φにおいて減少させる。
(もっと読む)
ゆらぎ信号発生装置、ゆらぎ信号発生方法、及びゆらぎ信号発生プログラム

【課題】様々な傾きを有したゆらぎを発生させるとともに、人の要求する山場(ピーク)位置もある程度設定できるゆらぎ信号発生装置を提供する。
【解決手段】ゆらぎ信号発生装置10は、パワー密度を算出する関数とパワー密度を算出する関数のパラメータを入力する入力部11と、入力部によって入力されたパラメータとパワー密度を算出する関数に基づいて、各周波数のパワー密度を算出するパワー密度算出部12と、パワー密度算出部によって算出された各周波数のパワー密度を正弦波成分と余弦波成分に分けるパワー密度分割部13と、パワー密度分割部によって分割された成分に基づいて逆フーリエ変換により時系列データを生成する時系列データ生成部14と、時系列データに基づいて出力データを生成し出力するデータ出力部15と、を備えた。
(もっと読む)
動作制御方法、インタラクティブデバイス及びプログラム
【課題】インタラクティブデバイス及びプログラムにおいて、人に違和感を与えないように、動作を切り替えたり動作を再開する。
【解決手段】任意の動作モジュール11−1〜Nが生成した動作シーケンスに所属する複数のコマンドを、複数の駆動部毎に、且つ、複数のコマンドの開始時刻順に受け付ける手順31と、各駆動部に対するコマンドキューが動作モジュールの単位で格納されたコマンドキュー格納部33−1〜Nから任意の動作モジュールに該当するコマンドキューのコマンドを取り出す手順と、各動作シーケンスを識別する情報と各動作シーケンスの開始時刻の対応付けを含むシーケンス情報36及び各動作モジュールと各動作モジュールの優先度の対応付けを含む動作調停情報32に基づいて取り出したコマンドを実行して該当する駆動部124−1〜Nを制御する手順34をコンピュータに実行させる。
(もっと読む)
PID調整支援装置および方法
【課題】過剰な精度追求の可能性を低減する。
【解決手段】PID調整支援装置は、ユーザが制御対象のモデリングの目標量データに対して認識している認識誤差範囲を予め記憶する認識誤差範囲記憶部10と、目標量データと制御対象モデルに基づいて算出された制御応答波形であるモデル応答波形とをモデリング結果として表示部12にグラフ表示させる共に、認識誤差範囲記憶部10に記憶された認識誤差範囲をモデリング結果と重ね合わせて表示させる表示処理部11とを備える。
(もっと読む)
ロボット装置及び動作制御方法
【課題】 ロボット装置自身の感情や本能等の状態に基づいて自律的に行動することを可能とする。
【解決手段】 供給される入力情報S1〜S3に応じた動作を行うロボット装置1であって、順次供給される入力情報S1〜S3の履歴に応じた現在の動作及び次に供給される入力情報S1〜S3に基づいて現在の動作に続く次の動作を、コントローラ32内の動作決定部が決定することにより、ロボット装置1自身の感情や本能等の状態に基づいて自律的に行動する。
(もっと読む)
車載機器の制御装置及び制御方法
【課題】少なくとも一つの車載機器に対する複数の操作の提案順序を適切に決定できる車載機器の制御装置及び制御方法を提供する。
【解決手段】制御装置は、少なくとも一つの車載機器に対する二つの操作について、その二つの操作のうちの一方が実行された後に他方の操作が実行される遷移確率を記憶した記憶部(21)と、車載機器に関する少なくとも一つの推薦操作を選択する推薦操作決定部(23)と、推薦操作決定部(23)により複数の推薦操作が選択されたとき、その複数の推薦操作の提案順序を、記憶部(21)に記憶された遷移確率に従って決定する提案順序決定部(24)と、複数の推薦操作を、提案順序決定部(24)により決定された提案順序に従って、少なくとも一つの車載機器に対して実行する制御部(27)とを有する。
(もっと読む)
車両の駆動力制御装置
【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
車両用空調装置、車両用空調装置の制御方法および制御装置
【課題】特定状況に対応する所定の設定操作を行う推薦確率を算出する確率モデルの構築に用いた複数の学習データのうち、その特定状況に関する学習データのみを削除し、残りの学習データを別の学習に利用できる車両用空調装置およびその制御方法を提供する。
【解決手段】車両用空調装置(1)は、複数の状態情報をそれぞれ学習データとして記憶する記憶部(61)と、確率モデルを構築する学習部(66)と、算出した推薦確率に応じて、乗員の設定操作に関連する設定情報等を、所定の設定操作となるように修正する(64)と、修正された設定情報等にしたがって空調制御を行う空調制御部(65)とを有する。学習部(66)は、複数の学習データを用いて確率モデルを構築する確率モデル構築手段(663)と、構築された確率モデルに学習データを入力し、得られた推薦確率が第1の閾値以上のとき、その学習データを削除する学習情報整理部(666)を有する。
(もっと読む)
運動制御システム
運動制御システム(10)は、オペレータ入力部材(20)を有するオペレータインターフェース(13)と、オペレータ入力部材に駆動連結される制御可能な力フィードバック装置(18)とを含む。運動制御システムはまた、第2の操作パラメータの目標値(TARv)と第2の操作パラメータの実際値(ACTv)との間の制御誤差(Ec)に少なくとも部分的に関係するように第1の操作パラメータを調整することを含めて、1つ以上の可動構成要素(12)の運動を調整する制御部(14)を含むことが可能である。第2の運転パラメータの目標値は、オペレータ入力部材の運動に少なくとも部分的に基づくことが可能である。制御部はまた、制御誤差に少なくとも部分的に関係するように、および制御誤差に対するフィードバック力の導関数が少なくとも部分的に制御誤差に応じて変化するように、制御可能な力フィードバック装置を操作してフィードバック力をオペレータ入力部材に提供することが可能である。  (もっと読む)
(もっと読む)
モデル予測コントローラの解の解析プロセス
多変数予測コントローラ(MPC)からの解は解析されて、MPCコントローラの解のコントローラ制限を変更することの効果について定量的な入力をオペレータに提供することにより説明される。この情報により、オペレータは変化に対して迅速に対応することができ、プロセス運転の最適化が促進される。 (もっと読む)
ハイブリッド制御デバイス
ロボット用ハイブリッド制御システムは、ニューロン制御部分と非ニューロン制御部分とを含むことができる。 (もっと読む)
制御装置および方法、並びにプログラム
【課題】 自立的な行動を制御できるようにする。
【解決手段】 入力期待値計算部502は、現状の行動を維持したときに環境に与える影響を所定の方法により算出する。行動後入力期待値計算部504は、現状の行動とは異なる行動を起こしたときに環境に与える影響を所定の方法により算出する。算出されたこれらの値の差が最も大きくなる行動が、行動探索部505により探索される。探索された行動を実行するためのデータが、行動生成部506に供給され、アクチュエータなどが駆動されることにより探索された行動が実行される。実行された行動に関するデータは、保持部507に供給され、所定のタイミングで、写像学習部508による学習が行われ、次回の行動にその学習結果が生かされるシステムとされている。本発明は、自律行動を行うロボット装置に適用することができる。
(もっと読む)
装着式動作補助装置及び制御用プログラム
【課題】 装着者の個人差や体調等の変動要因によらず、制御方法に応じた効果を発揮することのできる装着式動作補助装置及び制御用プログラムを提供することを解決すべき課題とする。
【解決手段】 動作補助装置10では、装着者12に装着された状態において当該装着者12固有の動力学パラメータをパラメータ同定部160により同定し、該同定した動力学パラメータを代入した運動方程式に基づき制御装置100により駆動源140を制御するように構成してあるため、装着者12の個人差や体調等の変動要因によらず、制御装置100に適用される制御方法に応じた効果を発揮することができる。
(もっと読む)
パソコン・バイオ・ナノ・IT機器装脱着施術設置など々、の生活ナレッジナノクローンシステム携帯電話機ロボット(以下ロボットと記す)
【課 題】 人間は、神様の創造物であるとするならば、ロボットは、人間の創造物であり、パートナーとすることで、人間に役だつ機能を具備構成し、日常生活に手助け有効な生活ナレッジナノクローンシステム携帯電話機ロボツトが、人間を上廻る知能を、なしえない事もやってくれるロボットを提供する。
【解決手段】 携帯電話機本体がロボット(検索ロボット呼称など)の役目をする。有線、無線基地局、インターネットプロトコル電話局などと通信して、情報交換、制御データベース変換、履歴ファイル処理、データに基づいた画・映像表示、言語翻訳音声認識、記憶、プログラム入出力指示、発着信指示、駆動指示、電波電源タイムスイッチ切り替え指示入出力部、通信、データモード、識別コード、GPS位置情報等々有し構成する。通信網を介して、ITバイオインフォマティクスロボット、センサーで安全に飛行するロボットを、車の代用とする。又多種多様のロボットを提供できる。
(もっと読む)
1 - 16 / 16
[ Back to top ]