
Fターム[5H004JB01]の内容
フィードバック制御一般 (10,654) | 検出部(オブザーバを含む) (399) | 絶対値で検出するもの (155)
Fターム[5H004JB01]に分類される特許
1 - 20 / 155
バンプレス調節弁操作
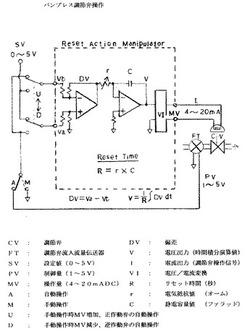
【課題】操作の安全性および弁の耐久性確保に不可欠な要件であるバンプレス調節弁操作を実現する手法を提供する。
【解決手段】制御系の開ループ手動操作で、適切なリセット時間で発生する操作量のランプ(傾斜)変化と、これに対する制御量応答とを計測および解析する。解析結果から、操作量から制御量までの定位性制御対象信号伝達特性値、すなわちゲイン定数Kと遅れ時間(等価時定数T+等価むだ時間L)とより、最適リセット時間RoをRo=4*|K|*(T+L)とする。ワンパラメータ(R)チューニングによりバンプレスな調節弁操作を行うことができる。
(もっと読む)
フィードバック制御回路、フィードバック制御システム

【課題】回路規模やコスト、消費電力を低減しつつ、信号伝達遅延を抑制することが可能なフィードバック制御回路、及びこれを一部に含むフィードバック制御システムを提供する。
【解決手段】入力信号を増幅する増幅手段12と、前記増幅手段の出力信号に対して積分演算を行う一段以上の積分手段30と、前記積分手段の少なくとも一部をバイパスして信号を伝達する一以上のフィードフォワード経路FF1と、前記積分手段から入力される信号と前記フィードフィードフォワード経路を介して入力される信号を加算する加算手段22と、前記加算手段の出力を量子化して出力信号を生成する量子化手段32と、前記量子化手段により生成される出力信号を、前記一段以上の積分手段のうち最終段の積分手段の入力側に伝達するフィードバック経路FB1と、を備えるフィードバック制御回路。
(もっと読む)
フィードフォワード制御装置およびフィードフォワード制御方法
【課題】制御回路の構成を複雑化させることなく、変化量演算の取り扱いを容易化したフィードフォワード制御装置およびフィードフォワード制御方法を提供する。
【解決手段】フィードフォワード制御装置50Aは、あるプロセス量を指標にして先行要素の量を決定するフィードフォワード制御部21Aを具備し、フィードフォワード制御部21Aは、現在のプロセス量を入力し、サンプリング周期毎に逐次記憶する記憶部を有し、この記憶部に記憶された過去のプロセス量を入力時から所定時間経過時に出力するサンプリング遅延器51aと、サンプリング遅延器51aに入力される現在のプロセス量と記憶部に記憶された過去のプロセス量とから所定時間で変化したプロセス量の変化分を算出する減算器24とを備え、先行要素の量を減算器24で算出されたプロセス量の変化分に基づいて調整するように構成される。
(もっと読む)
状態推定装置及び制御装置
【課題】制御対象の状態(例えば速度)を精度良く推定でき、且つ、サンプル遅れを防止可能な状態推定装置を提供する。
【解決手段】制御対象であるプラントへの制御入力と前記プラントの状態とに基づき前記プラントの状態変数を推定する、オブザーバを含んで構成された状態推定装置11において、前記オブザーバは、前記プラントの状態のサンプリング値であって時間間隔が互いにN(Nは2以上の整数)サンプル離れたサンプリング値と、前記制御入力の連続するサンプリング値とに基づいて、前記状態変数を推定する。
(もっと読む)
制御装置、制御モデル調整装置及び制御モデル調整方法
【課題】制御対象の入出力関係を模擬した制御モデルを用いて制御を行う際に、制御モデルと制御対象の特性の乖離により制御精度が低下しないようにする。
【解決手段】安定した実績制御量が測定されたタイミングで制御対象から実績データを取り込み、モデル調整の実行許可タイミングを生成するモデル調整起動手段を備える。そして、モデル調整起動手段に起動されたタイミングで現状の制御モデルを用いて予測制御量を算出する第1の制御量算出手段と、モデル調整起動手段に起動されたタイミングで制御モデルの調整対象のパラメータをあらかじめ定められた値だけ変化させ、同様の演算で予測制御量を算出する第2の制御量算出手段を備える。更に、第1の制御量算出手段が推定した予測制御量、及び第2の制御量算出手段が推定した予測制御量、実績制御量等を取り込み、制御モデルの調整対象パラメータの修正量を算出する制御モデル修正量算出手段を備える。
(もっと読む)
電動パワーステアリング制御装置
【課題】ドライバがハンドルを切る際にはその操作感を損なわないようにしつつ、ハンドル戻し時には急な戻り感を低減して車両の収斂性を向上させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】路面反力に対するモータ速度の特性は、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法でモータを駆動する場合に比べて、従来のダンピング制御ありの場合の特性とほぼ同様に、所定の周波数帯域においてモータ速度が抑制される。一方、ハンドルトルクに対するモータ速度の特性については、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法の特性からほとんど変化がない。このように異なる2つの特性(仕様)を共に満たす制御装置を構成することで、ドライバのハンドル操作を妨げることなく車両の収斂性を向上させることが可能となる。
(もっと読む)
サーボ制御回路、アクチュエータの制御装置、および撮像装置
【課題】周波数が高い領域においても良好な制御特性を維持するとともに、集積回路化が容易なPID制御によるサーボ制御回路を提供する。
【解決手段】サーボ制御回路100において、差分演算部10は、制御対象から検出された検出信号xに比例した量と第1の信号fに比例した量との差uを出力する。A/D変換部21は、差分演算部10の出力uをデジタル変換する。積分部22は、A/D変換部21の出力Uをデジタル積分する。D/A変換部23は、積分部22の出力に比例した量Fをアナログ変換して、第1の信号fとして出力する。加算演算部15は、A/D変換部21の出力Uに比例した量と積分部22の出力Fに比例した量との和Dを出力する。デジタルPI制御部40は、加算演算部15の出力Dと目標値Rとの偏差Eに基づいて比例演算および積分演算を行なうことによって、制御対象を制御する制御信号Yを生成する。
(もっと読む)
調節計
【課題】所望のパラメータを速やかに表示することができる調節計を提供する。
【解決手段】複数のパラメータを用いて、調整対象を調整する調節計であって、パラメータを表示する表示部20と、複数のパラメータの表示順をパラメータに対応付けて記憶する設定パラメータ記憶部7と、表示順に応じた遷移経路にしたがって、表示器に表示されるパラメータを切換える表示切換用キーと、複数のパラメータのうち、ユーザによって選択された選択パラメータを記憶する選択パラメータ記憶部8と、表示部20に対して、前記選択されたパラメータを優先的に表示させる第1ユーザファンクションキーと、を備えている。そして、選択パラメータ記憶部8に記憶される1つの選択パラメータとして、2以上のパラメータを含むパラメータ群を設定可能になっている。
(もっと読む)
インバータシステムの無駄時間補償装置
【課題】制御対象に非線形要素を含んでいても、直接制御対象モデルに組み込んでスミス予測器を具備した無駄時間補償装置及びその方法を提供する。
【解決手段】無駄時間を有する制御対象として、当該制御対象におけるフィードバック制御系の安定性を保つための無駄時間補償装置であって、非線形要素を含む制御対象G(s)e-sLと同じ応答特性を有するモデル回路P(s)を、オペアンプ回路によるアナログ計算機、又はFPGA回路のハードウエア回路で実装したスミス予測器を具備し、前記モデル回路P(s)に、前記制御対象と同じ信号を入力して出力信号を取得し、前記取得した出力信号をフィードバック制御系に負帰還させ、さらに前記取得した出力信号を、前記制御対象と同じ無駄時間要素e-sLに入力し、前記入力した無駄時間要素e-sLの出力信号と前記制御対象の出力信号の差分信号を、フィードバック制御系に負帰還させている。
(もっと読む)
質量流量コントローラのシステムおよび方法
【課題】質量流量コントローラの製造中に使用されたものと異なる流体および/動作条件で動作するように質量流量コントローラを構成する方法を提供する。
【解決手段】さまざまな異なるタイプの流体および動作条件の下で一定の制御ループ利得を有するように質量流量コントローラを制御し、質量流量コントローラの製造中に使用されたものと異なる流体および/動作条件で動作するように質量流量コントローラを構成するシステムおよび方法。さらに、このシステムおよび方法には、非動作信号をソレノイド作動装置に供給することによってソレノイド作動装置のヒステリシスの影響を減らすことによって制御を提供することが含まれる。
(もっと読む)
制御パラメータ調整方法および制御パラメータ調整プログラム
【課題】一組の試験データから直接に制御パラメータを決定できるようにする。
【解決手段】制御対象11に開ループで操作量u(t)を与えて制御する制御装置12の伝達関数C(x)を決定する制御パラメータxを、目標値r(t)に対する制御対象11の制御量y(t)の応答が参照モデルMに近づくように調整する際に、制御対象に時刻とともに変化するテスト入力信号列u1(t)を与えて制御量の時間変化であるテスト出力信号列y1(t)を採取し、誤差‖Mr(t)−PC(x)r(t)‖を変形した評価関数Jを最小にするように制御パラメータxを決定する。評価関数Jは、y1(t)=Pu1(t)に注意すると、未知の制御パラメータxで表される制御装置12の伝達関数C(x)と、既知の伝達関数M、テスト入力信号列u1(t)およびテスト出力信号列y1(t)とで表されて、J=‖Mu1(t)−C(x)y1(t)‖となる。
(もっと読む)
プラント運転支援装置
【課題】動特性に影響を及ぼすパラメータであっても、プラント全体のバランスを考慮して調整できるプラント運転支援装置を実現すること。
【解決手段】オンラインシミュレータを用いたプラント運転支援装置において、実プラントの実測データに基づきオンラインでパラメータ調整を行いながらトラッキングモデルを生成するトラッキングモデル部と、このトラッキングモデルに基づき予測データを生成する予測モデル部と、生成された予測データと前記実測データを格納する予実データ記憶部とを備え、前記トラッキングモデル部は前記予実データ記憶部に格納されている予測データと実測データの差が最小になるようにパラメータを調整するとともにトラッキングモデルを更新することを特徴とするもの。
(もっと読む)
プラント運転支援装置
【課題】実プロセスに試験操作を与えることなくプロセス制御装置に適切な制御パラメータを求め、求めた制御パラメータを実プロセスに反映させることができるプラント運転支援装置を実現すること。
【解決手段】実プラントからオンラインで実測データを収集してその内部モデルを更新することにより高精度のシミュレーション結果を得るオンラインシミュレータと、制御性能確認部と制御パラメータ解析部を含む解析部と、これら実プラントおよび解析部に対する操作設定を行う操作設定インタフェースとを備え、
前記解析部は前記オンラインシミュレータから状態変数の値を受け取り試験操作を行ってプロセスの応答を得ることにより前記実プラントに適切な制御パラメータを求め、これら求めた制御パラメータを前記操作設定インタフェースを介して前記実プラントに反映させることを特徴とするもの。
(もっと読む)
電気機器の運転制御装置
【課題】停電中においても制御部の時計機能を長時間にわたって有効な状態に維持できるため停電からの復帰時にも停電前と略同様な運転制御を行え、しかも低コストに実施可能な電気機器、例えば貯湯式給湯機の運転制御装置を提供する。
【解決手段】交流電源1にスイッチング電源2を介して接続された制御部10を有する貯湯式給湯機の運転制御装置である。停電検出手段20を備え、また、制御部10とは並列にバックアップコンデンサ28を接続する。上記停電検出手段20は、停電時のスイッチング電源2のコンデンサの放電が終了する前の段階で停電検出信号を出力可能に構成する。そして、停電検出信号が出力されたときに制御部10がスタンバイモードへと移行する。スイッチング電源2のコンデンサ放電の後は上記バックアップコンデンサ28から制御部10へと給電を行う。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】搬送アクチュエータの振動を抑制すると共に、各駆動軸の回転動作が他の駆動軸に与える影響を低減する。
【解決手段】右搬送アクチュエータ32が伸縮動作する場合、中央制御装置10の制御部12は、縮み位置から伸び位置へ移動させるための位置指令を右搬送アクチュエータ制御装置30に出力し、現状を維持するための0°の位置指令を旋回アクチュエータ制御装置40に出力し、現状を維持するための距離0の位置指令を左搬送アクチュエータ制御装置20に出力する。右搬送アクチュエータ制御装置30は制振制御用の位置ゲインを用いて制振制御を行い、旋回アクチュエータ制御装置40は駆動軸42−Kが回転しないように維持制御を行い、左搬送アクチュエータ制御装置20は通常の位置ゲインを用いて駆動軸22−Kが回転しないように維持制御を行う。
(もっと読む)
オートチューニング方法、温度調節器および熱処理装置
【課題】加熱冷却制御において、1回のオートチューニングによって、加熱側および冷却側の制御パラメータを得られるようにすることを目的とする。
【解決手段】加熱側の比例帯が2位置制御によるリミットサイクル波形の設定温度SPを基準とした昇温側の振幅Aupに比例する加熱側の算出式、および、冷却側の比例帯が、前記リミットサイクル波形の設定温度SPを基準とした降温側の振幅Adownに比例する冷却側の算出式をそれぞれ用いて、加熱側の比例帯および冷却側の比例帯を算出するようにしている。
(もっと読む)
制御パラメータ調整システム
【課題】制御パラメータの調整テストを適切に終了させることが可能な制御パラメータ調整システムを提供する。
【解決手段】制御パラメータ調整システムは、制御パラメータ調整装置10とテスト監視装置20とを備える。テスト監視装置20は、予め定められた終了条件を満たす場合、制御パラメータ調整装置10にテスト終了信号を送出する。制御パラメータ調整装置10は、テスト監視装置20からテスト終了信号を受信した場合、該テスト終了信号受信時に算出された制御パラメータを制御装置6に適用する。
(もっと読む)
パラメータ同定装置及びパラメータ同定プログラム
【課題】複数のパラメータの同定を適切に行う。
【解決手段】同定パラメータの変化量と表間数の変化量の関係(影響度)を調べる(ステップ11)。影響度に応じて各パラメータの影響度が所定の関係になるように補正量を求める(ステップ12)。求めた補正量により修正ゲインを補正する(ステップ13)。
(もっと読む)
制御装置、温度調節器およびゲイン調整装置
【課題】温度制御などにおいて、干渉の強い制御対象であっても、ハンチング等が生じない安定な制御を可能とする。
【解決手段】各チャンネルのコントローラC1,C2の比例ゲインを、各チャンネル間の干渉を考慮して、操作量を変化させたチャンネルのみの検出温度の応答に基づいて求められる比例ゲインよりも小さな比例ゲインとしている。
(もっと読む)
誤差評価装置、誤差評価方法、誤差評価プログラム、および監視装置
【課題】観察対象の系から出力されたランダム信号をサンプリングして得られたランダム時系列データに基づいて求められたARMAパラメータの誤差を高精度に評価する。
【解決手段】ARMAパラメータの算出とは別にその系の伝達関数を求め、それよりゲインを算出し、
に基づいて誤差を求める。
(もっと読む)
1 - 20 / 155
[ Back to top ]