
Fターム[5H004KA31]の内容
フィードバック制御一般 (10,654) | 制御部 (412) | サンプリング制御 (66)
Fターム[5H004KA31]の下位に属するFターム
デジタル制御 (36)
むだ時間を考慮したもの (9)
連続検出不可能な対象を制御するためのもの
サンプリング周期を可変とするもの (6)
Fターム[5H004KA31]に分類される特許
1 - 15 / 15
スライディング・モード制御方式において、制御器を構成する方法、プログラム及びシステム
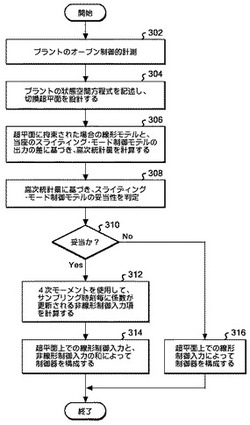
【課題】 プラントにおいて、スライディング・モード制御を適用すべきかどうかを、必要最小限の計測実験データから自動判別すること。
【解決手段】 システムは先ず、プラントを、オープン制御的に計測し、その計測データを用いて、既存のシステム同定手法と次数決定法により、プラントの状態方程式を記述する。スライディング・モード制御の切換超平面を設計する。次に、超平面に拘束された時の線形モデルの制御入力のみを用いた場合の出力と、スライディング・モードの制御入力を用いた場合の出力との間の差分について、3次モーメントと、4次モーメントという高次統計量を計算する。3次モーメントの値が所定の閾値より大きいかまたは、4次モーメントの値が所定の閾値より大きい場合、線形制御入力項と、非線形制御入力項の和として、制御器を構成する。3次モーメントの値と4次モーメントの値がどちらも、所定の閾値より小さいと判定した場合、システムは、線形制御入力項のみを用いて制御器を構成する。
(もっと読む)
フィードバック制御回路、フィードバック制御システム

【課題】回路規模やコスト、消費電力を低減しつつ、信号伝達遅延を抑制することが可能なフィードバック制御回路、及びこれを一部に含むフィードバック制御システムを提供する。
【解決手段】入力信号を増幅する増幅手段12と、前記増幅手段の出力信号に対して積分演算を行う一段以上の積分手段30と、前記積分手段の少なくとも一部をバイパスして信号を伝達する一以上のフィードフォワード経路FF1と、前記積分手段から入力される信号と前記フィードフィードフォワード経路を介して入力される信号を加算する加算手段22と、前記加算手段の出力を量子化して出力信号を生成する量子化手段32と、前記量子化手段により生成される出力信号を、前記一段以上の積分手段のうち最終段の積分手段の入力側に伝達するフィードバック経路FB1と、を備えるフィードバック制御回路。
(もっと読む)
プロセス制御データを収集する方法および装置
【課題】プロセス制御データを収集するための方法、装置、および製造物品を開示する。
【解決手段】プロセス制御データを収集するための例示的方法は、測定されるパラメータおよび測定サンプリングレートを記述する電子デバイス記述を登録することと、その測定サンプリングレートに基づいてパラメータを測定することと、測定されたパラメータを代表するデータをデータ構造に保存することと、データの要求、データと関連付けられる状態、またはデータと関連付けられるイベントのうちの少なくとも1つに応答して、プロセス制御ネットワークを介して、データ構造内のデータを第1のプロセス制御デバイスに転送させることと、を含む。
(もっと読む)
多変数制御装置
【課題】制御プロセスの一部分として操作値軌跡を生成するために、モデル予測制御モデル(MPC)を使用し、被制御システムのシステムモデルの反復有限区間最適化を決定する1つまたは複数の物理的構成要素を有する被制御システムの予測モデル制御の方法およびシステムを提供する。
【解決手段】時間tにおいて被制御システム100の現在の状態をサンプリングし、操作変数MV軌跡を最小化する費用関数が将来の比較的短い時間区間の間にMPCモデルを用いて計算され、MPCは最適解を見つけるために二次計画(QP)アルゴリズムを使用し、QPアルゴリズムは、勾配射影に基づいておよびニュートンステップ射影を使用して、単純制約を有するアクティブセットソルバクラスアルゴリズムを使用して解かれる。操作値軌跡の移動が実行され、制御プロセスは、予測区間を前にシフトし続けることにより前に移動される。
(もっと読む)
フィードフォワード制御装置およびフィードフォワード制御方法
【課題】制御回路の構成を複雑化させることなく、変化量演算の取り扱いを容易化したフィードフォワード制御装置およびフィードフォワード制御方法を提供する。
【解決手段】フィードフォワード制御装置50Aは、あるプロセス量を指標にして先行要素の量を決定するフィードフォワード制御部21Aを具備し、フィードフォワード制御部21Aは、現在のプロセス量を入力し、サンプリング周期毎に逐次記憶する記憶部を有し、この記憶部に記憶された過去のプロセス量を入力時から所定時間経過時に出力するサンプリング遅延器51aと、サンプリング遅延器51aに入力される現在のプロセス量と記憶部に記憶された過去のプロセス量とから所定時間で変化したプロセス量の変化分を算出する減算器24とを備え、先行要素の量を減算器24で算出されたプロセス量の変化分に基づいて調整するように構成される。
(もっと読む)
状態推定装置及び制御装置
【課題】制御対象の状態(例えば速度)を精度良く推定でき、且つ、サンプル遅れを防止可能な状態推定装置を提供する。
【解決手段】制御対象であるプラントへの制御入力と前記プラントの状態とに基づき前記プラントの状態変数を推定する、オブザーバを含んで構成された状態推定装置11において、前記オブザーバは、前記プラントの状態のサンプリング値であって時間間隔が互いにN(Nは2以上の整数)サンプル離れたサンプリング値と、前記制御入力の連続するサンプリング値とに基づいて、前記状態変数を推定する。
(もっと読む)
システム同定方法及びシステム同定装置
【課題】 誤った推定を与えないM系列信号を生成してシステム同定を行うシステム同定方法及びシステム同定装置を提供する。
【解決手段】 第1のサンプリング周期T1、及び、第1のシフトレジスタ数n1で特徴付けられる第1のM系列信号と、第1のサンプリング周期T1と異なる第2のサンプリング周期T2、及び、第2のシフトレジスタ数n2で特徴付けられる第2のM系列信号とを合成して第3のM系列信号を生成し、これを入力信号としてシステム同定を行う。
(もっと読む)
道路トンネル換気制御装置及び道路トンネル換気制御方法
【課題】対面通行型トンネルまたは一方通行型トンネルにおいて、火災発生地点からの煙の拡散効果を短時間で確実に抑えることができ、より安全なトンネル環境を維持できるようにする。
【解決手段】トンネル本線上で、火災発生時にトンネル内の風速を低風速化する低風速化演算部と、トンネル本線において、施工後の換気システムの性能評価を行うための性能評価手段と、を備える。この低風速化演算部は、火災発生地点から両坑口に設置された風向風速計の内、どちらを使用するかを判定する制御判定手段と、風向、風速からジェットファンの運転台数及び回転方向を設定するための演算手段からなるジェットファン運転台数・回転方向設定手段とを含み、これら両坑口に設置された風向風速計とトンネル内に設置されたジェットファンを用いて、火災発生地点の風速を制御する。
(もっと読む)
鋳型内の湯面定在波変動検出方法、湯面定在波制御方法、湯面レベル制御方法および連続鋳造方法
【課題】1つの湯面レベルセンサーから得られる湯面変動から高精度に定在波変動分と体積変動分とを分離し、湯面定在波・湯面レベルを制御する、鋳型内の湯面定在波変動検出方法、湯面定在波制御方法、湯面レベル制御方法および連続鋳造方法を提供することを目的とする。
【解決手段】連続鋳造機の鋳型内の所定位置における湯面レベル変動の定在波変動分の定在波周波数を、鋳型幅から算出し、その周波数で定在波をsin関数とcos関数で記述して、その記述された定在波の係数を測定した湯面レベル変動からオンライン推定することにより、定在波変動分を求める。
(もっと読む)
プロセス制御装置及びプロセス制御システム
【課題】容易にプロセス制御機能を変更することができるプロセス制御装置を得る。
【解決手段】監視装置2の自動選択指令手段2aからの指令信号によりプロセスの動特性を測定し、測定結果に基づき制御命令群メモリ12に記憶された制御命令群の中から所定の制御命令を選択してループタグテーブルメモリ15のFUNCコードメモリエリア15aにコードとして記憶させる自動選択手段20と、FUNCコードメモリエリア15aに記憶された制御命令を参照しながら所定のプログラムを実行することによりプラントのプロセスを制御するCPU16とを備えた。自動選択手段20によりプログラムが参照する制御命令を変更するので、プログラムを変更することなく容易に制御機能を変更できる。
(もっと読む)
能動型防振適応制御装置
【課題】安定領域を算出する際に近似式ではなく適応制御アルゴリズムに用いる関数そのものを用いることができる適応制御アルゴリズムによる能動型防振適応制御装置を提供する。
【解決手段】誤差信号e(t)などを用いて、正弦成分と余弦成分の相関を利用して、防振対象振動の推定未知関数dh(t)の振幅ahおよび位相φhを算出する。算出された防振対象振動の推定未知関数dh(t)の振幅ahおよびφh、および、伝達関数の推定値Gh(s)に基づき、制御信号u(t)の振幅Ahおよび位相Φhを算出し、且つ、制御信号u(t)の振幅Ahおよび位相Φhを更新する。
(もっと読む)
駆動制御装置
【課題】広範囲な角速度指令に対して、安定で高精度な角速度追従特性と角度精度を実現可能にする。
【解決手段】応答可能範囲を拡大すべく駆動指令を生成していた過程に、立ち上がり、立下りを考慮したプロファイル型指令生成器4と、高精度な追従特性を得るべく2自由度型モデル追従補償器7とで構成された制御系を具備するとともに、該制御系の上位制御器として、要求される角速度で安定に駆動すべく要求プロファイルや補償器を適応的に切り替えたり、全体システムの安定性に関する評価指標をリアルタイムで算出しながら、コントローラを自動的に設定する最適制御器9を備えた構成を採用する。
(もっと読む)
ディジタル制御装置
【課題】入出力確認試験における作業を軽減し、入出力確認試験の期間短縮が可能なディジタル制御装置を提供する。
【解決手段】プラントに対する制御を行うためプラントとの間で信号の入出力を行う制御基板10に、試験コネクタ14と切換回路13を設ける。切換回路13は、試験コネクタ14に試験ツール30の試験ツールケーブル31が接続されるとき、入出力回路の接続先を正規コネクタ12から試験コネクタ14に切り換えて、試験ツール30を入出力回路11と接続させる。これにより、試験ツール30により、制御基板10に対する入出力確認試験を行えるようにする。
(もっと読む)
サーボ制御装置及び制御パラメータ決定方法、並びに制御パラメータ決定プログラム
【課題】サーボ制御系に対して明確な制御パラメータを簡便に設定する。
【解決手段】制御系の周波数特性を複素数で表現し、制御パラメータ生成部28で開ループ周波数特性のゼロクロス周波数fxに基づいて複素数の零点を指定する。ディスク回転周波数等から決定された制御器の低域カットオフ周波数asを決定し、目標とするゼロクロス周波数fxを決定する。次に、制御パラメータ生成部28の制御パラメータ算出部41において、制御器の複素数の零点cs、dsを開ループ周波数特性のゼロクロス周波数fxに基づいて決定し、制御器ゲインKpの暫定値を決定する。次に、サーボをかけて開ループ周波数特性を測定し、開ループ周波数特性のゼロクロス周波数が目標とするゼロクロス周波数fxに一致するよう制御器ゲインKpを決定する。続いて、開ループ周波数特性から位相余裕を確認し、位相余裕が42°から32°であれば、このときの制御パラメータを最終的な制御パラメータとして決定する。
(もっと読む)
サーボ制御装置
【課題】 光ピックアップのアクチュエータ等のディジタルサーボ制御装置において、近似法を用いることなく連続時間系の制御対象を離散時間系の補償器で制御することにより、低コストで高精度の制御を可能とする。
【解決手段】 バネ支持されたアクチュエータのディジタルサーボ系において、連続時間制御対象を「リフティングを用いたサンプル値H∞制御理論」によって近似なく設計した離散時間補償器を有することで、比較的サンプル時間の長いシグナルプロセッサを用いたディジタルサーボ系においても、また、高転送レート化の図られる光ディスクシステムにおいても、信号の離散化によるサンプル点間の近似化を回避し、優れたノミナル性能とロバスト安定性を有する光ピックアップを提供する。
(もっと読む)
1 - 15 / 15
[ Back to top ]