
Fターム[5H004KA32]の内容
フィードバック制御一般 (10,654) | 制御部 (412) | サンプリング制御 (66) | デジタル制御 (36)
Fターム[5H004KA32]に分類される特許
1 - 20 / 36
PIDゲイン調整装置及びPIDゲイン調整方法
【課題】PIDゲインを確実かつ短時間に最適化する。
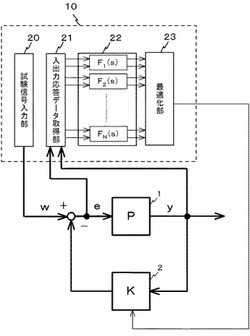
【解決手段】入出力応答データ取得部21は、線形時不変なプラント1における入出力応答データを取得する。動特性抽出部22は、入出力応答データ取得部21によって取得された入出力応答データを、サンプル周波数ωiを固有角周波数とするそれぞれ異なる複数のバンドパスフィルタFi(s)に通すことにより、複数の異なるサンプル周波数ωi各々に対するプラント1の動特性を抽出する。最適化部23は、プラント1を制御するフィードバック制御系のコントローラ2のPIDゲインに関して凸となる制約条件の下で導出された線形制約式に、動特性抽出部22によって抽出されたサンプル周波数ωiがそれぞれ異なるプラント1の動特性をあてはめることにより、複数の線形制約式を作成し、作成された複数の線形制約式に基づいて線形計画法を用いてPIDゲインの最適値を求める。
(もっと読む)
流体制御装置

【課題】デジタル制御を採用したバルブ制御器であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる圧力制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体の圧力を測定する圧力センサ3と、前記圧力センサ3で測定される圧力の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御器4と、を備え、前記バルブ制御器4が、入力される値に対して所定の演算を施して前記流体制御バルブ2の開度の操作量に関連する値を演算する操作量演算部41と、入力される値に対してデジタル制御により位相のずれを補償した値を出力する位相補償部42と、を備えた。
(もっと読む)
流体制御装置
【課題】デジタル制御を採用したバルブ制御機構であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる流体制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体に関する物理量を測定する流体測定部1と、前記流体測定部で測定される物理量の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御機構4とを備えた流体制御装置100であって、前記バルブ制御機構4が、前記測定値と前記設定値の偏差に基づいてデジタル制御によって前記流体制御バルブ2の開度の操作量を演算する操作量演算部41と、アナログ制御によって位相遅れを補償する位相補償部42と、を備えた。
(もっと読む)
プラント状態量の予測方法およびこれを用いたプラント動特性シミュレータ、プラント状態監視装置ならびにプラント予測制御装置
【課題】放射基底関数ネットワークを使用したプラント状態量の予測方法および装置を提供する。
【解決手段】本実施例は、放射基底関数ネットワーク13を用いる予測演算部1を有する。予測演算部1の入力値は、(1) 被予測状態量の動特性に影響を及ぼす状態量または操作量の現時刻より所定のサンプル前までの過去時刻サンプル値、(2) 現時刻サンプル値、(3) 被予測状態量の現時刻より所定のサンプル前までの過去時刻サンプル値とする。予測演算部1の出力値は、(4) 被予測状態量の現時刻サンプル値とする。放射基底関数ネットワーク13は、前記入力値及び出力値に基づいて、逐次的にサンプル周期を進めて次のサンプル時刻の被予測状態量の動特性を予測計算する。
(もっと読む)
フィードバック制御装置及びフィードバック制御プログラム
【課題】スイッチング素子のON/OFF動作に起因するノイズの影響を受けない形でフィードバック制御を行えるフィードバック制御装置を提供する。
【解決手段】フィードバック制御装置は、PWM信号発生部12に対する制御内容を決定するために必要な情報を得るためにセンサ21からのアナログ信号をADコンバータ17にAD変換させる際に、スイッチング素子14のスイッチング動作を停止させる構成(遅延回路16、2入力NANDゲート13)を備える。
(もっと読む)
制御装置
【課題】 バイラテラル(マルチラテラル)方式による同期制御において、制御系の導出や調整を簡易化しつつ、同期精度を向上させることを目的としている。
【解決手段】 同期誤差が入力される第1学習フィルタ及び第2学習フィルタを含み、第1学習フィルタの出力にもとづいて第1の制御対象に制御入力をフィードフォワードし、第2学習フィルタの出力にもとづいて第2の制御対象に制御入力をフィードフォワードする反復学習制御回路とを備える。さらに、第1学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含み、第2学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含む。
(もっと読む)
モータ制御装置
【課題】 フィードバック制御系のサンプリング速度とモデル制御系のサンプリング速度との差に起因する影響を、従来よりも少ない演算量で抑制して、モデル追従制御を実施できるモータ制御装置を提供する。
【解決手段】 速度制御器115は、モデル制御系105のサンプリング速度の遅れに相当する伝達関数を有するローパスフィルタ113と、速度積分器117を含む積分制御系116と、比例制御系118と、速度比例ゲイン乗算部119とを含んでいる。積分制御系116は、加算部SP2によって加算された速度指令とモデル速度指令とを合算した指令から、ローパスフィルタ113から出力された遅延速度情報を減算部SP4で減算した指令を、速度積分器117に入力する。
(もっと読む)
フィードフォワード信号を用いたディジタルサーボ制御装置
【課題】 モータ動作中の位置偏差を小さく、または、モータ位置決め時のオーバーシュート量を小さくすることができた、更に、モータ動作中の速度またはトルクフィードフォワード信号が量子化誤差の影響によるばたつきを低減して、モータが一定速度で動作している時の騒音を小さくすることができるフィードフォワード信号を用いたディジタルサーボ制御装置を提供する。
【解決手段】 フィードフォワード制御系が、位置指令に基づいて速度フィードフォワード信号vff0を生成する速度フィードフォワード作成部6と、前記位置指令に基づいてトルクフィードフォワード信号tffを生成するトルクフィードフォワード作成部8と、前記速度フィードフォワード信号vffおよび前記トルクフィードフォワード信号tffに基づいて速度フィードフォワード変更信号vffを生成する速度フィードフォワード変更部7と、を備える。
(もっと読む)
内燃機関の空燃比制御装置
【課題】経年変化によらず内燃機関の運転状態を正確に判定し、判定された運転状態に応じて高精度な制御が可能な内燃機関の空燃比制御装置を提供する。
【解決手段】内燃機関の空燃比制御装置が、実際の燃料噴射量である実燃料噴射量u及びその噴射による空燃比である実空燃比yを保存する記憶手段と、保存された実燃料噴射量u及び実空燃比yに基づいて所定時間経過後の内燃機関の運転状態である先読み運転状態fcを推定する運転状態推定手段と、保存された実燃料噴射量u及び実空燃比y並びに先読み運転状態fcに基づいて前記所定時間経過後の空燃比である先読み空燃比faを推定する空燃比推定手段と、先読み空燃比faに基づいて燃料噴射量を補正する燃料噴射量補正手段とを具備する。
(もっと読む)
油圧駆動システムの制御方式
【課題】制御上の工夫によって、サーボ弁等の高価なアクチュエータを用いなくても、アクチュエータを精度よく動作させることができる制御方式を提供する。
【解決手段】空間的及び時間的に連続した連続値制御信号uを出力する主制御部11,12と、アクチュエータ2との間に、切換部14を介して選択的にフィードバック変調器20を接続する。フィードバック変調器20は、アクチュエータ2における、入力信号の受付け可能時間間隔、入力信号の取り得る離散値、及び、入出力特性に基づいた変換式によって、連続値制御信号uを空間的及び時間的に離散した離散値制御信号uQに変換する。切換部14は、連続値制御信号uの値が変調領域に入っているときにはアクチュエータ2へ離散値制御信号uPが出力され、それ以外のときは連続値制御信号uが出力されるように、接続を切り換える。
(もっと読む)
デジタルPID制御装置
【課題】デジタル制御化されたPID制御装置の制御動作を低振動化および低騒音化し、制御精度を向上させる。
【解決手段】デジタルPID制御装置であって、制御対象1の現在のアナログ状態量を検出する検出器2と、現在のアナログ状態量を現在のデジタル状態量に変換するAD変換器11と、制御対象1の目標のデジタル状態量と現在のデジタル状態量との差分である偏差量を入力とし、制御対象1に対するデジタル操作量を生成するデジタルPID制御手段9とを備え、デジタルPID制御手段9は、偏差量の絶対値が設定値以下の場合には偏差量を抑圧して出力する積分用不感帯部12および微分用不感帯部13のうち少なくとも一方を備え、積分用不感帯部12の出力に対するデジタル積分演算及び微分用不感帯部13の出力に対するデジタル微分演算のうち少なくとも一方の演算を実行することによりデジタル操作量を生成する。
(もっと読む)
ディジタル制御器の設計方法及びディジタル制御器及びプログラム
【課題】従来よりも少ない処理負荷で、制御対象を制御できるようにする。
【解決手段】制御プログラムを生成するに際しては、まず採用する伝達関数を、部分分数分解して、当該伝達関数を、分解前における伝達関数を構成する分母の次数よりも、小さい次数の分母で表される分数式(部分分数)の和に変換する(S110)。そして、伝達関数を構成する部分分数の内、ゲインの小さい部分分数を、演算周期を長くする部分分数に決定する(S130)。また、演算周期を長くする部分分数の係数を、新たに設定する演算周期に合わせて修正する(S150)。そして、演算周期に合わせて各部分分数に対応する演算プログラムを設計し、これらの演算プログラムを組み合わせて、制御対象を制御するための制御プログラムを生成する(S170)。
(もっと読む)
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
閉ループ制御方法、および多チャンネルフィードバックを有する閉ループ制御装置
多チャンネルフィードバックを有する閉ループ制御方法を説明する。該方法では、サンプリングレートfAで閉ループ制御変数xをサンプリングすることにより決定されるフィードバック変数r1、および、期間TSにわたる閉ループ制御変数xを平均化することにより決定される、さらなるフィードバック変数r2を、ガイド変数wとそれぞれ別々に比較する。処理において決定される制御エラーe1,e2のそれぞれを、個別閉ループ制御出力変数m1,m2をそれぞれ生成する分離されたコントローラ31,32に入力する。最後に、個別閉ループ制御出力変数m1,m2から生成される閉ループ制御出力変数mを、閉ループ制御変数xがガイド変数wを追従するように、閉ループ制御変数xを調節するために用いる。 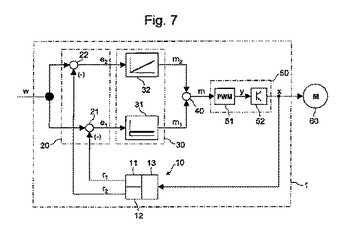 (もっと読む)
(もっと読む)
ディジタル制御装置
【課題】
オブザーバの補償ゲインおよび制御器の主要部のゲインを大きく上げることによって、外乱の影響を十分に抑制するとともに、フィードバック信号を目標指令に高速高精度に追従させることができるディジタル制御装置を提供する。
【解決手段】
ディジタルオブザーバ20を備えたディジタル制御装置において、ディジタルオブザーバ20は、制御出力と推定出力との偏差をオブザーバ補償器19に入力し、メイン操作量とオブザーバ補償器19の出力をオブザーバ制御対象18に入力し、ディジタルオブザーバ20のループに離散系における安定な極を持たせるようにオブザーバ補償器19を構成し、オブザーバ制御対象18の出力を推定出力とし、推定出力より位相進みとなる信号を位置または速度のフィードバック信号とする。
(もっと読む)
サーボ制御装置とその制御方法
【課題】 モータのフィードバック速度にかかわらず外乱抑制性が高く滑らかな制御ができるサーボ制御装置とその制御方法を提供する。
【解決手段】 速度制御器(1)、電力変換器(2)、オブザーバ(5)、第1フィルタ(6)、第2フィルタ(7)、加算器(8)を備え、オブザーバから出力される推定速度Vfb^を第1フィルタ(6)でフィルタ処理した信号と速度検出値Vfbを第2フィルタ(7)でフィルタ処理した信号とを加算した信号を速度制御器(1)で使用する速度フィードバックVfb2として使用するようにした。
(もっと読む)
柔軟アームを有する移動ロボット
【課題】柔軟アームを有する移動ロボットにおいて、柔軟アームの振動および姿勢を、走行路面の環境に左右されることなく、安定的にかつ有効に制御すること。
【解決手段】走行機体およびブーム104にセンサ110〜116を取り付けて最小限の状態変数を計測し、計測できない状態変数はオブザーバによって推定して、ブーム104の姿勢および振動を状態フィードバック制御する。また、フィードバック制御に加えて、目標値変動補償用のフィードフォワード制御および外力軽減用のフィードフォワード制御を併用する。
(もっと読む)
パルス幅変調式負荷駆動装置
【課題】ノイズに強く、出力部が複数であってもそれぞれの出力部において正確なパルス状出力信号を得られ、入力端子数を少数に抑えることが可能なパルス幅変調式負荷駆動装置を提供することを目的とする。
【解決手段】第1駆動タイミング信号(c)に応じて第1出力信号(e)を負荷(5)の一端に印加する第1出力手段(3)と、第2駆動タイミング信号(d)に応じて第2出力信号(f)を負荷(5)の他端に印加する第2出力手段(4)と、所定の区間毎に前記負荷(5)の両端に電位差を発生させる時間情報(以下、差電圧時間情報と呼ぶ)を任意のビット数で表したシリアル信号の駆動入力信号(a)をパラレル信号(b)に変換する信号変換手段(1)と、前記パラレル信号(b)に応じて前記第1,第2駆動タイミング信号(c,d)を生成する駆動タイミング生成手段(2)とを設け、前記第1,第2出力信号(e,f)のパルス幅を増減し負荷(5)を駆動する。
(もっと読む)
外乱補償判断装置、外乱補償判断方法、記録媒体及びディスクドライブ
【課題】外乱補償判断装置及び方法とそれを利用したディスクドライブを提供すること。
【解決手段】プラントを制御する制御入力信号と制御入力信号に相応するプラントのサーボ出力信号とを入力して、プラントに印加された外乱値を推定する外乱観測器1000と、外乱観測器1000で推定された外乱値の絶対値を一定周期内で累積しつつ、累積された推定外乱の値を初期設定された条件によって評価して外乱補償オン/オフモード転換を決定する外乱評価器270と、外乱補償オン/オフモード転換決定によって、外乱観測器1000で推定された外乱値のフィードバックオン/オフをプラントの制御ループにスイッチングするスイッチング手段280とを備えることを特徴とする外乱補償判断装置を提供する。
(もっと読む)
制御装置
【課題】ゲイン変更時に生じる速度変動を抑制することができ、リアルタイムにゲインの変更をしても、指令値に対する軌跡精度が低下することがない制御装置を提供する。
【解決手段】制御装置は、位置指令を生成する指令生成部2と、所定のタイミングでゲインを変更し、サーボ制御部2に出力するゲイン制御部3と、指令生成部2より出力される位置指令を補正し、補正位置指令を生成する位置指令補正部4と、補正位置指令と、ゲイン制御部3からの変更後のゲインに基づいてモータを駆動するサーボ制御部1とを備えている。
(もっと読む)
一般化予測制御(GPC)を基礎とする軸の位置制御方法
軸(2)のための位置調節器(1)に、瞬時位置実際値(x(0))、瞬時位置目標値(x*(0))および予測位置目標値(x*(ti))と、各予測位置目標値(x*(ti))についてそれぞれ直前の位置目標値(x*(0),x*(ti))に対するそれの時間的ずれ(δti)を表わす値とが入力されている。位置調節器(1)が、軸(2)のモデル(6)に基づいて、瞬時操作量(S(0))と、予測位置目標値(x*(ti))についてその都度期待操作量(S(ti))および期待位置実際値(x(ti))とを算出する。位置調節器(1)が、瞬時操作量(S(0))、期待操作量(S(ti))および期待位置実際値(x(ti))を、瞬時位置実際値(x(0))および期待位置実際値(x(ti))と対応する位置目標値(x*(0),x*(ti))との総偏差(G)が予め定められた評価関数にしたがって最適化されるように算出する。位置調節器(1)が軸(2)を瞬時操作量(S(0))に応じて制御する。  (もっと読む)
(もっと読む)
1 - 20 / 36
[ Back to top ]