
Fターム[5H004KA66]の内容
フィードバック制御一般 (10,654) | 制御部 (412) | 単一制御対象に対し複数制御部を持つもの (34) | 制御部を切り換えるもの (18)
Fターム[5H004KA66]に分類される特許
1 - 18 / 18
負荷適応型制御ループ切り替え方法及び負荷適応型帰還制御装置
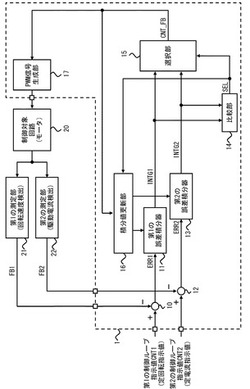
【課題】従来の制御ループの切り替え方法では、制御ループの切り替え時に制御対象回路が不安定になる問題があった。
【解決手段】本発明の制御ループの切り替え方法は、第1の誤差積分値INTG1に第1の誤差値ERR1を加算して第1の誤差積分値INTG1を更新し、第2の誤差積分値INTG2に第2の誤差値ERR1を加算して第2の誤差積分値INTG2を更新し、更新後の第1の誤差積分値INTG1と第2の誤差積分値INTG2とのうち小さな値を示す誤差積分値に基づきPWM信号のデューティ比を決定し、更新後の第1の誤差積分値INTG1とINTG2第2の誤差積分値とのうち小さな値を示す誤差積分値で更新後の第1の誤差積分値INTGと第2の誤差積分値INTG1のうちPWM信号のデューティ比の決定に用いられなかった誤差積分値を更新する。
(もっと読む)
被処理物の熱処理装置

【課題】 制御の追従性と定常特性の向上を図ることができる被処理物の熱処理装置を提供する。
【解決手段】 被処理物を熱処理する熱処理炉4と、熱処理炉を制御するための複数の設定値と複数の制御部選択信号を出力するシーケンサ10と、熱処理炉の複数の制御量を制御するために構成されている複数の制御系ループとを備え、各制御系ループに、前記シーケンサからの設定値と前記熱処理炉からの制御量とに基づいて操作量を出力する複数の制御部と、複数の制御部から出力される操作量のうち1つをシーケンサ10からの制御部選択信号に従って選択して熱処理炉4に出力する切替器3−1,3−2,3−3とをそれぞれ備えた被処理物の熱処理装置において、シーケンサ10は、複数の制御系ループの制御構成の切替をそれぞれ独立して行うための手段を有する。
(もっと読む)
パラメータ決定装置及び方法並びにプログラム
【課題】制御器の切替時において、切替後の制御の特徴を調整すること。
【解決手段】複数の制御器を備えるシステムにおいて、処理を行う制御器を切り替える場合に、切替後の制御器で用いるパラメータを決定するパラメータ決定装置13であって、異なる特徴を有する複数の演算式の組み合わせからなるとともに、異なる特徴の重みづけを変更可能とするパラメータ算出演算式を備え、パラメータ算出演算式の重み付けを切り替え前の制御器の状態に応じて決定し、決定した重み付けが与えられたパラメータ算出演算式を用いて切替後の制御器におけるパラメータを決定する。
(もっと読む)
パラメータ決定装置及び方法並びにプログラム
【課題】制御器の切替時において、切替後の制御の特徴を調整すること。
【解決手段】複数の制御器を備えるシステムにおいて、処理を行う制御器を切り替える場合に、切替後の前記制御器で用いるパラメータを決定するパラメータ決定装置であって、異なる特徴を有する複数の演算式の組み合わせからなり、該異なる特徴の重みづけを変更可能とするパラメータ算出演算式を備え、パラメータ算出演算式を用いることにより、切替後の制御器において使用されるパラメータを決定する。
(もっと読む)
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
(もっと読む)
位置決め制御装置及びレーザ加工機
【課題】
位置決め時間を短くする位置決め制御装置を提供する。
【解決手段】
モータの位置決め制御を行う閉ループ制御系の位置決め制御装置100であって、モータの目標位置が入力される目標位置入力ブロック1と、モータの実位置及び実速度をフィードバックして、目標位置入力ブロック1に入力された目標位置とモータの実位置との偏差に応じた第一の目標指令信号を生成する制御則A(17a)と、モータの実位置及び実速度をフィードバックして、目標位置とモータの実位置との偏差に応じた第二の目標指令信号を生成する制御則B(17b)と、目標位置に応じて、第一の目標指令信号と第二の目標指令信号とのいずれかをモータに入力するように切り替えるスイッチブロック5とを有し、制御則A及び制御則Bは、閉ループ制御系の極配置が互いに異なるように設定されている。
(もっと読む)
制御装置、制御プログラム及び方法
【課題】ニューラルネットワーク制御に係る処理負荷を軽減させる制御装置、制御プログラム及び方法を提供する。
【解決手段】互いにネットワーク構成が異なる複数のニューラルネットワークのうち、所定のニューラルネットワークである第1ニューラルネットワークを選択し、複数のニューラルネットワークのうち、第1ニューラルネットワークとは異なるニューラルネットワークである第2ニューラルネットワークを選択し、第1ニューラルネットワークによる制御と、第2ニューラルネットワークによる制御とによる制御誤差を測定し、第1ニューラルネットワークによる制御誤差と、第2ニューラルネットワークによる制御誤差とを比較し、より制御誤差が低いニューラルネットワークを判断する選択部16と、選択部16によってより制御誤差が低いと判断されたニューラルネットワークによりシステムの動作を制御する算出部16及び最終コントローラ102とを備える。
(もっと読む)
サーボ制御方法、サーボ制御装置
【課題】オープン制御から適応スライディングモード制御へと移行する際の制御性の悪化を回避する。
【解決手段】オープン制御から適応スライディングモード制御へと移行する際に、適応スライディングモードコントローラ51の制御入力を移行直前のオープンコントローラ52の制御入力に一致させるべく、適応スライディングモードコントローラ51の状態量を算定するようにした。
(もっと読む)
プラントの制御装置、及び火力発電プラントの制御装置
【課題】本発明の目的は、予測モデルの特性が実際のプラントの特性と相違する場合でも、プラントの制御特性を良好に維持できるプラントの制御装置を提供する。
【解決手段】本発明のプラントの制御装置は、プラントに対する操作信号を生成する操作信号生成手段と、プラントの特性を模擬するモデルと、モデルで模擬した出力信号が予め設定された目標を満足するようにモデルの入力信号を生成する学習手段と、学習手段での学習結果に従って学習信号を計算する学習信号生成手段とを備え、更に、ある操作信号及び更新した操作信号をプラントに与えた結果として取得した該プラントの第1の計測信号及び第2の計測信号とその目標値との誤差である第1の誤差及び第2の誤差をそれぞれ計算する操作結果評価手段と、第2の誤差が第1の誤差よりも大きい場合に操作信号生成手段で生成する操作信号の補正信号を生成する補正信号生成手段とを備えるように構成した。
(もっと読む)
プロセス工場において制御冗長性をアップグレードおよび提供するための方法と機器
【課題】プロセス工場において制御冗長性をアップグレードおよび提供するための方法と機器を提供する。
【解決手段】例示的な開示されるプロセス制御システムの制御装置のためのソフトウェアをアップグレードするための方法には、ソフトウェアの置換構成部分をインスタンス化することと、既存の構成部分から置換構成部分に状態データをコピーすることと、置換構成部分の第1の状態が既存の構成部分の第2の状態と一致する場合に置換構成部分を能動モードに変更することとが含まれる。
(もっと読む)
流体温度制御装置及び方法
【課題】流量制御弁の固体差に対応でき、オーバーシュートが良好に抑制でき、負荷外乱に十分に対応できる流体温度制御装置を提供する。
【解決手段】作動流体を熱交換器で冷却水により冷却し、ランプヒータで加熱して目標温度にする。冷却水の流量制御弁の制御では、熱交換器の非線形な冷却特性を補償するテーブルと、比例弁の非線形な流量特性を補償するテーブルとの2種類のテーブルを使用する。比例弁特性を補償するテーブルは、各パルス数位置に対して、その位置から1パルス数だけ移動したときに生じる流量の変化率を定義している。比例弁特性を補償するテーブルは、比例弁の固体差を表したパラメータを適用することで、個々の比例弁の特性に適合したものになる。過渡時には、現在温度の変化速度に応じて比例弁制御を行なう。整定時には、ランプヒータの出力を所定の適正出力範囲内に収めるように比例弁を制御する。
(もっと読む)
監視制御装置の二重化切換方式
【課題】より簡潔な論理で監視制御装置の切換を行うことができる監視制御装置の二重化切換方式を提供することにある。
【解決手段】監視制御装置S−1、S−2は制御部S−11、S−21と処理部S−12、S22とを有し、二重化されている制御部と処理部とは一方を運転系として動作させ、他方を待機系として動作させるものにおいて、運転系処理部が異常となり、制御部との通信が異常となったとき、制御権を放棄するとともに待機系に対して制御権取得命令を送信して待機系への移行処理を行うものである。
(もっと読む)
シーク制御方法、シーク制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御によるシーク制御制御装置において、シーク制御からフォローイング制御への切り替え時の電流段差を防止する。
【解決手段】シーク制御からフォローイング制御への切り替え時に、電流段差解消軌道生成部(28)が、電流値u(n),u(n−1)の差分から段差分の電流値Udiffを計算し、この計算値を相殺する目標位置軌道r‘(n)(又は目標電流軌道)を、フォローイング用コントローラ(22)に供給する。このため、出力電流の電流段差が解消される。
(もっと読む)
ゲインスケジューリング制御のためのシステム
ゲインスケジュールドフィードバックコントローラ10、11、30、40によって起動することができる、非線形プラント18を制御するシステム。様々なゲインを有する幾つかの線形サブコントローラ13、25、26、101、102を1つのユニットとしてまとめることができる。外因性パラメータ又は内因性パラメータに従って、1つのサブコントローラ13、25、26、101、102から別のサブコントローラに切り換えることによって、コントローラ10、11、30、40全体を変更させることができる。切換器に対する信号21は、特定の時点に発生するプラント18の動作範囲を反映し、それらの時点においてプラント18の出力信号17及び入力信号16に関連してシステムから所望されるゲインを示すことができる。本手法の利点は、大域的及び局所的の両方の、公称安定性及びロバスト安定性を保証すること、産業実務者によく知られている制御構造の使用を可能にすること、及び本手法の実施のために高度な数学的技法を一切必要としないことを含むことができる。 (もっと読む)
制御装置および制御方法
【課題】可能な限り少ないアクチュエータ数で状態量制御を実現する。
【解決手段】制御演算分岐部5は、第1のアクチュエータが稼働し、第2のアクチュエータが停止している際に、操作量MVaが上限値に到達している状態が特定時間Tahを経過して継続した場合は、第2のPID演算部3aに第2のアクチュエータを制御させ、第1のアクチュエータが最大出力を維持するよう第1のPID演算部3bに指示し、第2のアクチュエータが稼働し、第1のアクチュエータが最大出力を維持している際に、操作量MVbが下限値に到達している状態が特定時間Tblを経過して継続した場合は、第2のアクチュエータを停止するよう第2のPID演算部3bに指示し、第1のPID演算部3aに第1のアクチュエータを制御させる。
(もっと読む)
誘導性負荷制御装置
【課題】 誘導性負荷の電流を広範囲に精度良く制御可能で、しかも安価な誘導性負荷制御装置を提供する。
【解決手段】 ソレノイドの通電経路に設けられた駆動用トランジスタと、ソレノイドの通電経路に設けられた電流検出用抵抗と、その抵抗の両端電圧を増幅して出力する増幅回路とを備え、ソレノイドに流れている電流(負荷電流)を上記増幅回路の出力電圧から算出して、その算出した負荷電流が目標電流となるように上記トランジスタの駆動信号のデューティ比を制御する、電流フィードバック制御を行う装置において、目標電流が、増幅回路の出力電圧と負荷電流とが比例しない電流範囲に入った場合には(S120又はS130:NO)、負荷電流を目標電流にするためのデューティ比を、負荷電流の検出値に依らず、フィードバック制御実施時に記憶しておいた負荷電流とデューティ比との関係に基づいて設定するオープン制御を実施する(S150)。
(もっと読む)
調節装置
データ側で並列に接続され、出力側で切換ユニット(6)を介して1つの共通の信号出力端(8)に接続されている複数の調節器モジュール(4、4´)を有する調節装置(1、1´)において、特に簡単な手段及び信頼し得るやり方で個々の調節器モジュール間のバンプレス切換を可能にしようとするものである。そのため本発明に従えば、切換ユニット(6)にデータ側でそれぞれ調節器モジュール(4、4´)に所属する複数の微分要素(12)が接続され、また積分要素(14)が接続されている。  (もっと読む)
(もっと読む)
サーボモータの制御装置
【課題】速度追従から力追従への自動切換を安定して行うサーボモータの制御装置を簡便に実現する。
【解決手段】電動モータ1と、その駆動電流を帰還制御する電流制御手段12と、この電流制御手段12を介して電動モータ1の速度を速度指令Vcに追従させる速度制御手段11と、電動モータ1にて駆動される作動部2に生じた力Ffを検出する力検出部4と、電流制御手段12を介して電動モータ1の出力を力指令Fcに追従させる力制御手段24とを具えたサーボモータの制御装置において、力指令Fcと力検出部4の出力Ffとの差ΔFを演算する第1差演算手段24aと、速度指令Vcと電動モータ1の速度Vfの差ΔVを演算する第2差演算手段11aと、それらの差ΔF,ΔVを比較してその大小に応じて選択的に速度制御手段11と力制御手段24との何れか一方を電流制御手段12に結合させる選択切換手段22+23とを備える。
(もっと読む)
1 - 18 / 18
[ Back to top ]