
Fターム[5H004KB31]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | フィードフォワードを用いるもの (125)
Fターム[5H004KB31]の下位に属するFターム
Fターム[5H004KB31]に分類される特許
1 - 14 / 14
制御スケジューリング・システム及び方法
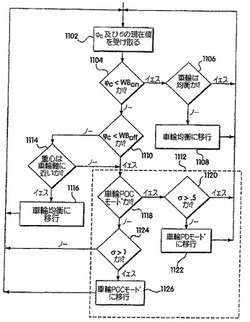
【課題】異なった制御モード間で円滑な変更を行う。
【解決手段】装置の第1の作動モードと第2の作動モードとの間で装置の制御を変更するシステムにおいて、装置を第1の作動モードで制御するための制御信号を生成するための第1の作動モードと関連した利得係数を利用し、且つ装置を第2の作動モードで制御するための制御信号を生成するための第2の作動モードと関連した利得係数を利用する制御ループと、装置が第1の作動モードから第2の作動モードに移行するとほぼ同時に第2の作動モードと関連した利得係数を用いて制御ループを動作させる利得セレクタと、モードの変化中に、制御信号における突然の変化を最小化するスムーザとを備える、システム。
(もっと読む)
加熱対象物の温度制御方法および温度制御装置

【課題】鋼板等の加熱対象物が低放射率である等の理由により温度計による所望精度での温度測定が見込めず、かつ所望精度でのモデル化も困難な加熱プロセスにおいても高精度な温度制御を行うことが可能な温度制御方法および温度制御装置の提供。
【解決手段】鋼板1の必要昇温量ΔTからモデル計算によりヒータ3の出力値を推定するための所要パワー計算モデル10と、ヒータ3による鋼板1の加熱後の温度を放射温度計4により測定し、この測定結果と温度目標値との偏差からヒータ3の出力値を算出する温度FB制御手段11と、モデル計算値をヒータ3へ出力指令するに際し、モデル計算値を温度FB制御出力値により補正する補正手段とを含む温度制御装置5である。
(もっと読む)
内燃機関の燃料噴射制御装置
【課題】内燃機関の運転状態の検出結果の信頼性が低下し、制御誤差が一時的に増大するような条件下でも、制御誤差を適切かつ迅速に補償でき、それにより、安定した燃焼状態を確保でき、燃焼時のノイズを抑制することができる内燃機関の燃料噴射制御装置を提供する。
【解決手段】制御装置1の噴射時期コントローラ30は、実着火時期Cmbを目標着火時期Cmb_TRGTになるように、FB項Inj_FBを算出し、図7,8のマップから算出した値Bs_Inj,IEGR_Injと、4つの修正値DBs_Inj,DBs_NVInj,DIEGR_Inj,DIEGR_NVInjとを加算することにより、FF項Inj_FFを算出し、FF項Inj_FFにFB項Inj_FBを加算することにより、目標噴射時期Inj_TRGTを算出する。2つの修正値DBs_Inj,DIEGR_Injは、追従誤差EIgが値0になるように算出される。
(もっと読む)
制御装置
【課題】 バイラテラル(マルチラテラル)方式による同期制御において、制御系の導出や調整を簡易化しつつ、同期精度を向上させることを目的としている。
【解決手段】 同期誤差が入力される第1学習フィルタ及び第2学習フィルタを含み、第1学習フィルタの出力にもとづいて第1の制御対象に制御入力をフィードフォワードし、第2学習フィルタの出力にもとづいて第2の制御対象に制御入力をフィードフォワードする反復学習制御回路とを備える。さらに、第1学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含み、第2学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含む。
(もっと読む)
外乱振動抑制制御器
【課題】パラメータ設定に多くの工数を要することなく、外乱により発生する振動を抑制する効果を最大化できる外乱振動抑制制御器を得る。
【解決手段】ローパスフィルタを内在し、目標電圧Vref及び検出電流信号Iactに基づいて推定外乱電圧Vestを演算する外乱電圧推定オブザーバ61と、推定外乱電圧Vestの低周波成分をカットした信号Vest_HPを演算するハイパスフィルタ62と、Vest_HPにゲインKWを乗じて目標外乱抑制電圧Vref_wを演算する外乱電圧制御器(外乱制御器)63とを設け、前記ローパスフィルタのカットオフ周波数とハイパスフィルタ62のカットオフ周波数の積の平方根が外乱周波数と一致するように、前記ローパスフィルタ及びハイパスフィルタ62のカットオフ周波数を設定する。
(もっと読む)
アクチュエータの角度伝達誤差補償方法
【課題】波動歯車減速機を備えたアクチュエータの角度伝達誤差に含まれている非線形弾性変形成分を効果的に抑制可能な補償方法を提案すること。
【解決手段】波動歯車減速機付きアクチュエータの角度伝達誤差に含まれる非線形弾性変形成分は、モータ軸の回転方向が変化した際に、可撓性外歯歯車の弾性変形により発生する角度伝達誤差の成分であるので、モータを正弦波状に駆動し解析を行うことができる。この解析結果から得られた非線形弾性変形成分モデル(非線形モデル)を用いて、モータ制御装置内にその補償のための関数あるいはデータを記憶させ、非線形弾性変形成分補償(θHys)をフィードフォワード補償用の補償入力(Nθ*TE)として、モータ軸角度指令(θ*M)に加える。この結果、非線形弾性変形成分(θHys)を効果的に低減でき、アクチュエータの位置決め精度を向上させることができる。
(もっと読む)
プロセス制御方法およびプロセス制御システム
【課題】圧延設備における板厚制御のような特性を有するプロセスの制御について、より安定的な制御を行えるようにする。
【解決手段】入力量Aと入力量Bがあり、影響係数が入力量Aに相関しているプロセス31を制御対象とし、当該制御対象プロセスの状態量33からの制御量38による積分制御を含むフィードバック制御を入力量Bに対して行うようにされているプロセス制御方法について、第1の積分器55と第2の積分器56を第1の入力量の状態に応じて使分けることで得られる第1の積分器からの第1の積分出力58と第2の積分器からの第2の積分出力59によりフィードバック制御の制御出力60を得ることにより、第1の入力量が一定に保たれる定常領域について、先行の定常領域での制御出力が後続の定常領域に影響するのを抑制することで、より安定的な制御を行えるようにしている。
(もっと読む)
段ボールシート製造装置の制御システム
【課題】製造された段ボールシートの反り、接着不良を高精度に抑制すること。
【解決手段】段ボールシート製造装置の制御システム100は、FF/FB制御装置101と、PIDコントローラ102と、知識データベース103とを含んでいる。FF/FB制御装置101は、知識データベース103によって動特性と静特性との補償分の判別を行い、FF制御とFB制御とを切り替える。PIDコントローラ102は、2自由度のPIDアルゴリズムに基づいており、知識データベース103からの情報に基づいてフィードバックゲインが調整される。
(もっと読む)
制御パラメータ決定方法及び装置
【課題】 FF+PID制御を行いオーバーフローすることなく迅速に目標値に達成するための制御パラメータを求めることのできる制御パラメータ決定装置を提供すること
【解決手段】 初期操作量ゲイン学習部3は、操作量を複数の区分に分割し、実際の制御中に取得した操作量以下の区分の存在時間を求め、閾値以上の存在時間の区分の中で最も大きい区分の操作量の下限値を求める。FFゲイン学習部4は、目標値に達した際の操作量と、制御終了時の操作量に基づいてFFゲインを求める。そして、初期操作量ゲインは、上記求めた下限値に最大操作量を掛けたものを目標値で割って得られた値と、FFゲインを比較し、大きい値を初期操作量ゲインに決定する。これにより、FF+PID制御するコントローラにおける初期操作量ゲインとFFゲインを設定する。
(もっと読む)
冷凍装置
【課題】被冷却物の冷却特性に応じた温度制御系統の構築を図ることである。
【解決手段】蒸発器(14)で冷却された冷却油を工作機械の主軸(21)との間で循環させる冷却油回路(20)を備えている。冷却油の冷却温度の変動状態を示す複数の評価パラメータに対して重み付けを定める重み付け設定部(33)と、蒸発器(14)における冷却状態を調節するための複数の制御パラメータを重み付けに応じて各評価パラメータを評価しながら各制御パラメータの最適値を学習制御する学習制御部(34)とを備えている。
(もっと読む)
フィードフォワード型閉ループ制御装置の状態修正によりコンポーネントを制御する方法及び装置
装置(10)は、フィードフォワード機構(16)及び閉ループ制御装置(18)を含む。フィードフォワード機構(16)は、システムの変化を求めるように構成されている。該システム変化は、システムのコンポーネント(12)の出力からは独立している。フィードフォワード機構(16)は、さらにシステム変化を表すフィードフォワード信号を生成するように構成されている。制御装置(18)は、フィードフォワード信号に応じて制御装置(13)の状態を修正し、また、その修正された状態に基づいてコンポーネント(12)の閉ループ制御を実行するように構成されている。これ関連した方法も開示する。 (もっと読む)
非線形モデルを利用したプラントにおける運転制御システム及び運転制御方法
【課題】 非線形の特性を有し、かつ、条件数の多いプロセスにおいて、広範囲に高精度で速やかにフィードフォワード制御を行なうことのできる運転制御システムを提供する。
【解決手段】 非線形モデルを用いて蒸留塔や反応炉等のプラントの運転制御を行う運転制御システムであって、前記非線形モデルを用いて制御対象の操作量に対する製品性状の予測を行う予測部1と、この予測部1の予測結果が入力され、前記予測結果に基づいて制御対象に対し所定の操作量を出力するとともに、入出力マトリックスにおいて対角要素に制御成分が設定されてなる制御器3と、この制御器3に前記予測結果を入力するに先立ち、静的モデルである非線形モデルに動的特性を付与する動特性化手段2とを有する。
(もっと読む)
サーボ制御装置
【課題】 目標指令とモータ出力との偏差を最小とする最適なフィードフォワードゲインを自動で設定できるようにする。
【解決手段】 目標指令とモータ2の出力との偏差絶対値の最大値を最小とするようなフィードフォワード制御器におけるフィードフォワードゲインを自動で設定できるフィードフォワードゲイン変更手段5を備える。フィードバック制御器4は目標指令とモータ2の出力とを一致させるような制御入力をモータ制御器3に与え、フィードバック制御器6は、目標指令を入力として加減速度一定時、及び速度一定時の偏差が零となるような複数の補償信号にフィードフォワードゲイン変更手段5において設定されたフィードフォワードゲインを乗じた複数のフィードフォワード信号をモータ制御器3に与え、モータ制御器3はモータ2を制御する。
(もっと読む)
モータ制御装置及び対応する制御方法
速度制御においては、動特性が変わることなく電流リプル及び速度リプルが減ぜられるべきであり、その際付加のハードウエア費用ができるだけ低く保持されるべきである。そのため、制御信号、特に速度偏差(ev)を少なくとも2つの信号成分(evhi及びevlo)に分割することが行われる。少なくとも2つの信号成分(evhi及びevlo)の各々は、異なる方法で処理される。特に、低い値の成分(evlo)は低域フィルタ(F)によって平滑化される。出力側に接続された加算器(Sum6)において、異なる処理をされた信号成分は最後に再び別の制御のために加算される。  (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]