
Fターム[5H004KC18]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 最適制御、最適化制御 (306) | H最適制御 (9)
Fターム[5H004KC18]に分類される特許
1 - 9 / 9
直進型及び回転型ロボットの制御装置
【課題】高精度な位置決めが要求される工作機械等において、比較的単純な構造を保ちつつ、迅速かつ高精度な位置決めを実現する直進型及び回転型ロボットの制御装置を提供する。
【解決手段】H無限大制御理論に基づく制御系であって、制御器は数式的に以下の3つの部分に分かれる。1)モータの速度が定常誤差なく追従できるように設計された速度制御器。2)速度制御ループを含めたモータに対して設計されたH∞角度制御器。3)ゲイン可変のフィードフォーワード制御器。制御対象の伝達関数に積分要素が含まれた場合における適切な制御が可能となる。
(もっと読む)
制御器の構成方法、システム及びプログラム
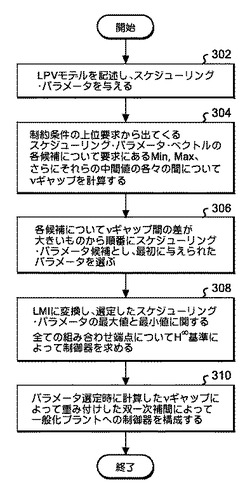
【課題】スケジューリング・パラメータ・ベクトルの各候補について、制御器を自動的に構成するための技法を提供する。
【解決手段】プラントのLPVモデルを記述し、スケジューリング・パラメータ数を与え、複数の要素からなるスケジューリング・パラメータ・ベクトルの各要素には、制約条件の上位要求から出てくる最大値と最小値が与えられ、その各候補について、Min、Max、それらの中間値の各々の間について、νギャップを計算し、νギャップ間の差が大きいものから順番にスケジューリング・パラメータ候補とし、最初に与えられたパラメータ数を選び、LMIに変換し、選定したスケジューリング・パラメータの最大値と最小値に関する全ての組み合わせ端点についてH∞基準によって制御器を求め、パラメータ選定時に計算したνギャップによって重み付けした双一次補間によって一般化プラントへの制御器を構成する。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法

【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
電動パワーステアリング制御装置
【課題】ドライバがハンドルを切る際にはその操作感を損なわないようにしつつ、ハンドル戻し時には急な戻り感を低減して車両の収斂性を向上させることが可能な電動パワーステアリング制御装置を提供する。
【解決手段】路面反力に対するモータ速度の特性は、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法でモータを駆動する場合に比べて、従来のダンピング制御ありの場合の特性とほぼ同様に、所定の周波数帯域においてモータ速度が抑制される。一方、ハンドルトルクに対するモータ速度の特性については、ダンピング制御なし(即ち基本アシスト量のみ)の従来の制御法の特性からほとんど変化がない。このように異なる2つの特性(仕様)を共に満たす制御装置を構成することで、ドライバのハンドル操作を妨げることなく車両の収斂性を向上させることが可能となる。
(もっと読む)
位置制御装置
【課題】加減速の小さい動作領域において、制御対象プラントが振動特性を有していても、外乱抑制性能の向上を達成する位置制御装置を提供する。
【解決手段】指令応答性能を重視したPI制御器とロバスト外乱抑制性能を重視したロバスト制御器を並列配置した速度制御器を構成し、加速度情報に基づいて、これらを切換えて制御する。切換え時におけるロバスト安定性の確保と円滑な切換え動作を実現するため、切換え時間を持った漸次切換えやトルク補償を行う。
(もっと読む)
フィードバック制御系の設計方法、設計プログラム、および設計支援装置
【課題】効率的に安定かつロバストな現実のシステムを設計すること。
【解決手段】制御系の共振モードを補償するノッチフィルタおよび共振モードを合成した全域通過フィルタがモデル化され(ステップS105)、全域通過フィルタを含む設計用制御対象が決定される(ステップS106)。そして、制御器に含まれる重み関数が導出された後(ステップS111)、設計者が設定した目標ゲイン交差周波数および位相余裕が用いられて、重み関数のゲインが調整される(ステップS112)。その後、位相進み重みに含まれる位相変数が決定されて、重み関数が確定される(ステップS113)。このようにして確定された重み関数および設計用制御対象に対してH∞ループ整形法が適用され(ステップS114)、H∞制御器が導出される(ステップS115)。
(もっと読む)
パンタグラフの集電方法及び装置、並びに電動式パンタグラフの実装方法及び装置
【課題】電動式パンタグラフの実装を可能にし、すり板とトロリー線の接触力の変動を早い速度で精度よく抑制し、構成を簡略化してメンテナンスを軽減し、万一電動アクチュエータが故障した場合にもパンタグラフの機能を維持してパンタグラフの信頼性を高める。
【解決手段】少なくともすり板11が先端ばね12で支持された弾性支持装置9を電車屋根部7に配置してすり板11をトロリー線6に押付けて集電を行う際に、弾性支持装置9を押付緩衝装置と電動アクチュエータ19の両方を用いて電車屋根部7に支持し、すり板11に設置した加速度計24と先端ばね12に設置した歪み計25の信号に基づいたH∞制御器23からの制御信号uにより電動アクチュエータ19を駆動して、すり板11とトロリー線6との接触力の変動が抑制されるようにすり板11の押付け力を制御する。
(もっと読む)
マルチレート制御方法及び装置
【課題】 本発明はマルチレート制御方法及び装置に関し、磁気ディスクの位置決め性能を向上することができるマルチレート制御方法及び装置を提供することを目的としている。
【解決手段】 あるサンプリング周波数で観測した観測量若しくはそれと目標値との差を用いて直接的にサンプル間の制御入力を生成する、連続的若しくは準連続時間のホールド関数付きの1型サーボ制御器生成手段2と、前記ホールド関数を区間毎に定数となる関数で近似する近似手段3と、1型サーボを実現する最適な制御入力を生成するホールド関数生成手段4と、前記2つのホールド関数の合成ホールド関数を生成する第1の生成手段5と、前記合成ホールド関数を任意の時間に任意の時間長だけホールドして制御入力波形を生成する第2の生成手段6とを有して構成される。
(もっと読む)
サーボ制御装置
【課題】 光ピックアップのアクチュエータ等のディジタルサーボ制御装置において、近似法を用いることなく連続時間系の制御対象を離散時間系の補償器で制御することにより、低コストで高精度の制御を可能とする。
【解決手段】 バネ支持されたアクチュエータのディジタルサーボ系において、連続時間制御対象を「リフティングを用いたサンプル値H∞制御理論」によって近似なく設計した離散時間補償器を有することで、比較的サンプル時間の長いシグナルプロセッサを用いたディジタルサーボ系においても、また、高転送レート化の図られる光ディスクシステムにおいても、信号の離散化によるサンプル点間の近似化を回避し、優れたノミナル性能とロバスト安定性を有する光ピックアップを提供する。
(もっと読む)
1 - 9 / 9
[ Back to top ]