
Fターム[5H004KC27]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 予測制御 (384) | モデルを用いるもの (198)
Fターム[5H004KC27]の下位に属するFターム
モデルを作成、修正するもの (72)
Fターム[5H004KC27]に分類される特許
101 - 120 / 126
プロセスモデルベースの仮想センサシステムおよび方法
仮想センサシステム(130)用の方法が提供される。本方法は、複数の検出パラメータ(306)と複数の測定パラメータ(302)との相互関係を示す仮想センサプロセスモデル(304)を確立するステップと、複数の測定パラメータに対応する一組の値を得るステップとを含む。さらに、本方法は、複数の測定パラメータに対応する一組の値と仮想センサプロセスモデルとに基づいて複数の検出パラメータの値を同時に計算するステップと、複数の検出パラメータの値を制御システム(120)に提供するステップとを含む。  (もっと読む)
(もっと読む)
火力発電プラントの起動スケジュール管理方法

【課題】 各系列の軸台数スケジュールを決めるには各起動モード毎に概略の時間表はあるが、各種条件により起動所要時間は大幅に変わってくるので、実際に系列制御用計算機に起動開始時刻を入力して時間の把握をしていた。そのために実際に発電プラントに起動スケジュールが登録され、登録の解除を忘れると起動操作が進行する恐れがある問題点があった。
【解決手段】 複数軸の発電ユニットを有する火力発電プラントにおいて、予め起動操作工程ごとに所要時間を計算するプログラムを用意し、該プログラムに従ってパソコン上に起動操作開始時刻から各起動操作工程の予想時間を算出し、各軸の運転のシミュレーションを行い、その後系列制御計算機に起動開始時刻を入力して登録して実際の起動操作を行うことを特徴とする。
(もっと読む)
制御装置

【課題】 位相遅れやむだ時間などが比較的大きい制御対象を制御する場合において、制御対象の入出力間での制御タイミングのずれの解消、および制御精度の向上をいずれも達成することができる制御装置を提供する。
【解決手段】 制御装置1のECU2は、状態予測器22およびDSMコントローラ24を備える。状態予測器22は、予測アルゴリズムに基づき、出力偏差VO2の予測値PREVO2を所定の算出周期ΔTkで算出し、DSMコントローラ24は、ΣΔ変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、目標空燃比KCMDを、予測値PREVO2の算出周期ΔTkよりも短い算出周期ΔTmで算出する。
(もっと読む)
適応多変数MPCコントローラ
プロセスの同定試験を用いて開発されたモデル予測コントローラからPIDコントローラのダイナミクスを除去することによって高速適応多変数コントローラを開発し、使用する方法を公開する。操作変数のような最終制御要素に基づき、生じた多変数コントローラは全てのPIDコントローラを手動に切り換えて新規の制御調節に用いられる。 (もっと読む)
エージェント学習装置、エージェント学習方法及びエージェント学習プログラム
【課題】 連続時間及び連続状態を取り扱うことができるとともに、環境から自律的且つ高速に学習を行うことができるエージェント学習装置を提供する。
【解決手段】 内部状態推定器201は、環境50からの観測変数yを観測し、責任信号推定器202は、当該観測変数yから推定された環境50の状態に基づいて責任信号を算出し、行動選択器101は、責任信号等を基に状態I及び行動Jを選択し、下位報酬関数選択器102は、選択された状態I及び行動Jに対応する下位報酬関数を制御信号出力器203へ与え、制御信号出力器203は、下位報酬関数を最大にするように環境50への制御出力を決定する。
(もっと読む)
プロセスの操業状態の制御方法、装置、及びコンピュータプログラム
【課題】 物理現象が複雑で非線形性が強い製造プロセスの時系列データベースに対し、指定した操業条件と類似の過去の操業事例を検索し、検索結果から将来状態を予測して操業状態を制御する方法を提供する。
【解決手段】 製造プロセスの時系列データベースを逐次作成し、現在時刻から予め指定した過去時刻までの所定のプロセス変数値を量子化し、現在時刻と合わせて検索用テーブルに格納する。制御起点時刻を起点としたプロセス変数値を量子化し、該量子化値を検索キーとして検索用テーブルを検索する。類似度基準に従い、前記検索キーと類似する量子化値を有するプロセス変数値の時刻を特定し、該プロセス変数値の制御起点時刻の操作変数の値と制御実現将来時刻の制御変数の値を取り出し、制御実現将来時刻で制御変数の値が設定した目標値に近づく操作変数の値を決定する。
(もっと読む)
MPCモデルによるオンライン・ダイナミックアドバイザ
プロセスの同定試験を使用して開発された、モデル予測制御要素からPID制御要素のダイナミクスを除去するための方法が開示されている。そして、これにより、リアルタイムのデータにアクセスして、代替的な制御可能性のシナリオを調べる能力とともにプロセスの将来の状態の予測を継続するようにプロセスとともに作動する、オンラインのオペレータ・アドバイザに基づく非常に迅速な最終制御要素の生成が可能となる。 (もっと読む)
シミュレーション装置
【課題】 プロセス毎にシミュレーション・モジュール化し、各モジュールからのシミュレーション結果を統合してシステム全体の挙動解析を好適に行なう。
【解決手段】 実機上の各プロセスをシミュレーション・モジュール化するが、全体の計算時間のボトルネックとなるプロセスは実機上での実験に置き換える。シミュレーション・モジュールと実機の間には、入力制御部と出力制御部が介在する。入力制御部は、各シミュレーション・モジュールのシミュレーション結果を実機の制御に利用し易いデータ形式に変換し、出力制御部は、実機からの出力情報をシミュレーション・モジュールでの入力形態に形式に変換する。
(もっと読む)
制御装置
【課題】 制御対象が位相遅れやむだ時間などが比較的大きい動特性を示す場合でも、制御対象の入出力間での制御タイミングのずれを解消することができ、それにより、制御の安定性および制御性を向上させることができる制御装置を提供する。
【解決手段】 制御装置1は、制御対象の出力状態の予測値PREVO2を算出する予測値算出手段(ECU2、状態予測器22)と、Δ変調アルゴリズム、ΔΣ変調アルゴリズムおよびΣΔ変調アルゴリズムのうちのいずれか1つの変調アルゴリズムに基づき、算出された予測値PREVO2に応じて、制御対象の出力Voutを制御するための、制御対象への制御入力(目標空燃比KCMD)を算出する制御入力算出手段(ECU2、DSMコントローラ24)と、を備える。
(もっと読む)
制御システムの解析のための方法
本発明は、ブロック線図環境においてモデル化された複雑な非線形動的システムに対して、コントローラを系統的にユーザが解析し、設計することを可能とするフレームワークを提供する。非線形プラントモデル(ブロック線図)から線形化したモデルを抽出することにより、ユーザは、線形システムに対して、利用可能な1以上の制御設計およびチューニング方法を使用することができる。クロスカップリングや外因性の攪乱等の複雑な副次的作用を、設計中にリアルタイムで見て処理することができる。設計の結果は、自動的にブロック線図において実行される。
 (もっと読む)
(もっと読む)
モデル予測制御装置
【課題】 処理負荷の増大に対して対処可能で、かつロバスト性を確保するモデル予測制御を提供すること。
【解決手段】 モデル予測制装置1は、フィードバック処理部50を備え、制御対象2の状態量あるいは制御量の実測値をフィードバックして、最適操作量検索部10における検索範囲あるいは予測値、内部状態推定部20における推定値を実測値により補正する。すなわち、フィードバックされた状態量あるいは制御量の実測値に基づいて、操作量候補算出部による操作量の算出範囲を設定して(FB1)無駄な演算を省略する。また、モデル予測部13への入力である操作量候補、出力である制御量、又は制御対象へ入力する最適制御量を補正し(FB2〜5)、さらには内部状態推定部からの出力を補正して(FB5、6)、予測精度を高める。
(もっと読む)
モデル予測制御装置
【課題】 モデル予測制御装置の処理負荷を低減させること。
【解決手段】 モデル予測制御装置1は、最適操作量決定部10、内部状態推定部20及び記憶データベース30を備えるとともに、内部状態推定制御部40を備えている。内部状態推定制御部40は、所定の条件を満足した場合に、内部状態推定部20の状態推定を省略して、処理負荷を低減させる。その条件は、(1)最適操作量決定部10における最適化回数が上限を超えるほど処理負荷が大きくなった場合、又は(2)制御対象から検出される制御量の実測値が目標制御量に対してほぼ等しく安定している場合である。
(もっと読む)
モデル予測制御装置及び方法
【課題】 故障や誤動作を回避できるモデル予測制御装置及び方法を提供すること。
【解決手段】 モデル予測制御装置1の最適操作量検索部10は、制御対象のモデルを用いて制御量を予測し、これに基づいて評価値を算出して、操作対象の最適操作量を検索する。操作対象検索部50は、最適操作量検索部10における予測制御量又は評価値が許容範囲を超えて、現在の操作対象による操作では有効な制御ができない場合、新たな操作対象を検索して決定する。最適操作量検索部10は、新たな操作対象に関してモデル予測制御を行なって最適操作量を検索する。このようにして、故障や誤動作を未然に回避する制御が行なえる。
(もっと読む)
温度推定装置およびこれを用いた制御装置
【課題】 処理対象にセンサを直接配置しなくとも、処理対象の温度を適切、正確に推定できるようにする。
【解決手段】 システム同定部33は、熱処理される処理対象19に加えられる第1の制御量PV1と、予め第1の制御量PV1が加えられて処理対象19から直接得られる第2の制御量PV2との関係から、第1の制御量PV1に基づき第2の制御量PV2の得られるシステムを同定する。システム同定部33は第2の制御量PV2が得られる第1の制御量PV1の演算に用いられる推定パラメータを導出する。処理状態検出部35は処理対象19が熱処理可能状態であれば検出信号を出力する。初期値設定部37は処理対象19の推定温度演算に用いる推定初期値を有する。推定演算部21は検出信号が入力されると、推定初期値、推定パラメータ、第1の制御量PV1に基づき処理対象19の温度を推定演算する。
(もっと読む)
歩行パターン作成装置、2足歩行ロボット装置、歩行パターン作成方法、2足歩行ロボット装置の制御方法、プログラムおよび記録媒体
【課題】パラレルリンク機構の2足歩行ロボット装置に安定した2足歩行を行わせることができる歩行パターンを作成する歩行パターン作成装置を提供することを目的とする。
【解決手段】足部(足底部)を備えた脚部と腰部とから成る2足歩行ロボット装置の歩行パターンを作成する歩行パターン作成装置であって、足部において目標ゼロモーメントポイントを設定し、設定した目標ゼロモーメントポイントに応じて腰部のモーメント補償軌道を算出し、絶対座標系における腰座標系の原点と絶対座標系における足座標系の原点とから腰座標系から見た足部の位置を算出し、絶対座標系から見た足座標系の姿勢を表わす回転行列と絶対座標系から見た腰座標系の姿勢を表わす回転行列とから腰座標系から見た足座標系原点の姿勢を表わす回転行列を算出して足座標系原点の姿勢を表わす回転行列により足部の姿勢を算出する。
(もっと読む)
モデル予測制御装置
【課題】 どのような制御量に対しても、予測精度を確保しつつ処理時間を短縮できるモデル予測制御装置を提供する。
【解決手段】 制御対象のモデルを用いて予測し、これを評価して最適制御を行なうモデル予測制御装置において、異なるサンプリング周期をもつ制御対象モデルを備え、サンプリング周期の切替えに対応して制御対象モデルを切替えるようにして、演算処理時間の短縮と予測精度の確保を両立させる。また、制御対象モデルの切替えは、制御対象モデルの離散化式のみを切替えても、離散化のための入力時定数を切替えてもよい。評価値は、長サンプリング周期で得られた出力を短サンプリング周期の出力に変換して算出することができる。または異なるサンプリング周期に対応して評価式の重み付けを異ならせて算出することもできる。
(もっと読む)
モデル予測制御方法
【課題】 モデル予測制御において、最適化演算の処理時間を短縮し、かつ演算精度の低下を抑える。
【解決手段】 制御対象の動的モデルを用いて操作量の各変数について数値微分を行って微分値を求め、微分値を要素とするヤコビアン行列に基づいて評価点を移動させ、移動した評価点ごとに評価を行なって最適操作量を決定するモデル予測制御方法において、微分値を所定値と比較して(S13)微分値が所定値より小さい場合、評価省略フラグをオンにする(S14)。次回のヤコビアン行列作成プロセスでは微分値を0として、数値微分を省略できる。この場合、微分値を0とする数値微分ステップが終了すると評価省略フラグをオフにして(S18)、その次の数値微分ステップでは数値微分を行なうようにすると、演算精度が向上する。
(もっと読む)
モデル予測制御装置およびモデル予測制御方法
【課題】 モデル予測制御において、予測演算時間を短縮しかつ安定制御を実行する。
【解決手段】 最適操作量候補検索部31により、最適操作量の候補を検索し、モデル予測部33により、制御対象20の動特性モデルを用いて制御量を予測し、評価部35により、予測された前記制御量と目標値との偏差をとって評価し、最適操作量を決定する。最適操作量候補の検索に先立って、操作量検索範囲設定部4により制御対象の動特性モデルを用いて検索範囲を設定し、無駄な検索を行なわないようにする。また、今回の予測制御を開始するにあたって、前回の最適操作量を今回の最適操作量の候補として予測した制御量と目標制御量との偏差が所定範囲内にある場合、前回の最適操作量を今回の最適操作量と決定するようにすれば、さらに予測に要する時間を短縮することができる。
(もっと読む)
モデル予測制御装置及びモデル予測制御方法
【課題】 モデル予測制御装置において、処理負荷の低減と安定な制御との両立を図る。
【解決手段】 モデル予測制御装置において最適操作量を決定する際の制約条件および評価式とその重み係数を、制約条件設定部32、評価式設定部36、重み設定部38に複数記憶しておき、制御目標量と現在の制御量との偏差に基づいて、すくなくとも1つを切換えて使用する。また、予測制御に際して、まず現在の操作量により制御量を予測し、該予測制御量と制御目標量とが所定範囲内にあれば、現在の操作量を最適操作量と決定する。
(もっと読む)
最適化された大気汚染制御
多段階制御機(610)は、工程を行うシステム(620)の稼動を指示する。前記工程は、複数の工程パラメータ(MPP)(625)を有するが、MPP(625)の1つ以上が制御可能な工程パラメータ(CTPP)(615)であり、MPP(625)の1つが目標設定工程パラメータ(TPP)(625)である。前記工程は、長さTPLAAV2の定義された時間におけるTPP(625)の実際平均値(AAV)に対する第1の限界を示す定義された目標値(DTV)を有する。前記AAVは、定義された期間におけるTPPの実際数値(AV)に基づいて計算される。第1論理制御器(630)は、少なくとも長さがTPLAAV2であり、現在時点T0から未来時点TAAV2まで延長される第1未来時間(FFTP)においてTPPの未来平均値(FAV)を予測し、このとき、前記TAAV2以前にTPP(625)が定常状態に移動する。FAVは、(i)長さがTPLAAV2以上であり、過去時点T−AAV2から現在時点T0まで延長される第1過去時間(FPTP)における様々な時点でのTPP(625)のAAV、(ii)MPP(625)の現在値、及び(iii)DTVを基にして予測される。第2論理制御器は、TPLAAV2の長さより短くTPLAAV1と等しい長さを有し、現在時点T0から未来時点TAAV1まで延長される第2未来時間(SFTP)の間にTTP(625)のAAVに対する第2の限界を示す追加的目標値(FTV)を確立する。FTVは、FFTPにおいて予測されたTPP(625)のFAVのうちの1つ以上に基づいて確立される。また、第2論理制御器は、(i)TPLAAV1の長さを有し、過去時点T−AAV1から現在時点T0まで延長される第2過去時間(SPTP)における様々な時点でのTPP(625)のAAV、(ii)MMP(625)の現在値、及び(iii)FTVに基づき、CTPP(615)各々に対する目標設定点を決める。第2論理制御機は、前記CTPP(615)に対して決められた目標設定点に従ってCTPP(615)各々の制御を指示する論理をさらに有する。 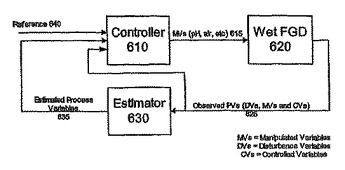 (もっと読む)
(もっと読む)
101 - 120 / 126
[ Back to top ]