
Fターム[5H004KC27]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 予測制御 (384) | モデルを用いるもの (198)
Fターム[5H004KC27]の下位に属するFターム
モデルを作成、修正するもの (72)
Fターム[5H004KC27]に分類される特許
81 - 100 / 126
計算機支援による技術システムの開ループ制御および/または閉ループ制御のための方法
本発明は技術システムの計算機支援による開ループ制御および/または閉ループ制御のための方法に関する。本方法は技術システムを記述する高次元の状態空間を効率的により低い次元に縮小するために用いられる。本発明によれば、状態空間の縮退は人工的なリカレントニューラルネットワークによって実行される。状態空間を縮小することにより、専ら低次元状態空間向けに設計されている公知の学習法を、元来大きな状態空間を有する複雑な技術システムに対しても適用できるようになる。それも、従来の方法をこの縮退した状態空間内で実行することにより可能になる。本発明による方法は任意の技術システムに対して、とりわけガスタービンに対して使用することができる。  (もっと読む)
(もっと読む)
ボイラプラントの制御装置

【課題】制御対象を模擬したモデルと実際の制御対象との挙動との間に誤差がある場合でも、局所最適解に陥るリスクを極力排除して制御対象を安全で安定に運転制御して最適解を探索できるボイラプラントの制御装置を提供する。
【解決手段】ボイラプラントの計測データを入力してプラント運転特性を模擬したプラントモデルに基づいてボイラプラントへの運転操作指令値を演算して運転を行うボイラプラントの制御装置に、運転データを蓄積した運転実績データベースと、蓄積した運転データから操作量の変化傾向を演算してボイラプラントの状態を判定する運転状態判定手段と、プラントモデルで計算したプロセス値とボイラプラントの計測値との誤差を計算するモデル誤差評価手段と、蓄積された過去のデータを含むプロセス値と操作指令値との相関関係をモデル化する運転データモデル化手段と、前記誤差値を用いて操作指令候補値を計算する探索点決定手段とを備えた。
(もっと読む)
ロボットシスシステム及びロボット制御装置

【課題】所望の時刻での位置を高精度に推定することが可能なロボットシスシステム及びロボット制御装置を提供する。
【解決手段】 モータによって所定部位が動作するロボット2と、モータをサーボ制御するサーボ制御器と、個々のサーボ制御器21等に対して動作指令を送信するロボット制御装置1と、を有するロボットシステムにおいて、ロボット2には、モータの回転角度に基づく位置データを検出するセンサと、が設けられ、ロボット制御装置1には、サーボ制御器21等への動作指令を生成するとともに、位置データを受信するホスト制御器10と、現在又は将来の位置データを推定する推定器13と、が設けられ、推定器13は、動作指令とサーボ制御器21等のサーボ制御パラメータを使用したシミュレータ出力を、既に知られた過去の位置データで補正することによって、現在又は将来の位置データを推定する。
(もっと読む)
プロセス制御装置
【課題】目標値変化に対する追従性を向上させると共に、外乱応答性を向上させる。
【解決手段】制御目標値SVに対して比例演算を行う比例演算器3と、無駄時間経過後予測制御量に対して比例演算を行う比例演算器5と、制御対象7の制御量PVと操作量MVとを入力して無駄時間経過後予測制御量を求める制御量予測器9と、制御目標値と無駄時間経過後予測制御量との偏差eを求める偏差演算器11と、制御量予測器9で過去に予測された現時点の制御量予測値と制御対象7における現時点の制御量PVとの差分を演算する予測制御量補正器13と、偏差演算器11の出力である偏差eと予測制御量補正器13の出力である差分とを加算する加算器15と、加算器15の出力を積分する積分演算器17と、比例演算器3と比例演算器5と積分演算器17の各出力を加算して制御対象7に対する操作量MVを生成する加算器19とを備える。
(もっと読む)
制御装置
【課題】制御量以外の参照パラメータの検出結果の信頼性の低下などに起因して、制御誤差が一時的に増大するような条件下でも、制御誤差を適切かつ迅速に補償でき、それにより、高い制御精度を確保できる制御装置を提供する。
【解決手段】制御装置1の空燃比コントローラ100は、連結重み関数Wcpiを空燃比誤差推定値Eafなどに乗算して、修正誤差Weafiを算出し、この値Weafiが値0になるように、値Dlift_bsiを算出し、連結重み関数Wcpiを値Dlift_bsiなどに乗算して、値Dlift_lsiを算出し、この値Dlift_lsiの総和である値Dliftを値Liftinに加算することにより、値Liftin_modを算出し、この値Liftin_modに応じて、空燃比をフィードフォワード制御するための第1推定吸気量Gcyl_vtを算出し、空燃比をフィードバック制御するための空燃比補正係数KAFを算出し、これらに応じて燃料噴射量TOUTを算出する。
(もっと読む)
パワーアシスト制御システム及びパワーアシスト装置
【課題】システム全体の性能を低下させることなく、入力信号にノイズを有するような制御システムにおいて制御を安定化させることができる制御システムを提供する。
【解決手段】オペレータHの動作を検知する動作検知部4,53によって入力された入力信号によってユーザー制御対象3,51が制御され、そのユーザー制御対象3,51からのフィードバック信号を受けて前記オペレータHから前記ユーザー制御対象3,51への操作量の入力を補助するパワーアシスト制御則5、52を有するパワーアシストシステム2に、前記オペレータHから前記ユーザー制御対象3,51へ伝達されるパワーを観測する仮想パワーモニタ11を備えたパワーアシスト制御システム1において、前記入力信号が前記ユーザー制御対象へ入力される制御信号経路中に前記制御信号経路中に発生するノイズをカットするノイズカッター6を備える。
(もっと読む)
非同期センサ情報に基づく測定値予測を使用して抄紙機または他の機械を制御する装置および方法
方法は、
プロセス(204)を制御するために、コントローラ(202)によって使用される測定値または状態を予測することを含む。予測される測定値または状態は、プロセス(204)のモデルを使用して生成される。方法は、また、予測される測定値または状態をコントローラ(202)に提供することであって、それにより、コントローラ(202)は、予測される測定値または状態をコントローラ(202)のサンプリングレートで使用する、提供することを含む。さらに、方法は、センサからのアイテムの特性に関連する測定値を使用して、予測される測定値または状態の少なくとも一部を更新することを含む。モデルは、離散時間モデル(304)を表してもよく、方法は、また、プロセス(204)の連続時間モデル(302)を使用して離散時間モデル(304)を生成することを含んでもよい。測定値は、複数のセンサ(122、124)から受信されることができ、センサのうち少なくとも2つは、異なるサンプリング時間を有する。 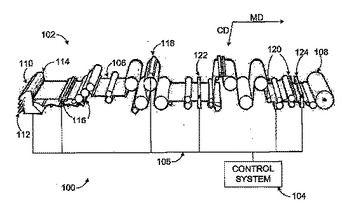 (もっと読む)
(もっと読む)
2自由度位置制御方法、2自由度位置制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御による位置制御装置において、演算による出力遅延による位置精度劣化を防止する。
【解決手段】オーバーラン防止のための二自由度制御系において、二自由度制御の出力の遅延(演算遅延及び駆動アンプ、D/Aコンバータ等のハード遅延)を考慮して、サンプル時点から遅延分進んだTdの推定状態を演算し、この推定状態から出力を演算する。サンプル時点から、計算中に状態変化があっても、出力遅延の影響を防止し、精度の高い位置制御が可能となり、オーバーランを防止できる。
(もっと読む)
シミュレーション装置、シミュレーション方法及びシミュレーションプログラム
【課題】精度の高い出力データを求めることのできるシミュレーション装置を提供する。
【解決手段】シミュレーション装置は、対象の状態を推定するモデルを作成する装置である。このシミュレーション装置では、シミュレーションモデルに入力データを入力して得られる出力データと出力データに対応する実測データとの誤差に対応する物理量の実測データを求め、出力データを、誤差に対応する物理量の実測データで補正してから、修正関数で補正する。このようにすることで、出力データを実測データに精度良く近似することができる。
(もっと読む)
モデルゲイン行列修正方法
不確定性を伴う多変数予測制御、計画または最適化モデルの定常状態ゲインを調整するための方法が提示されている。ユーザーは、予測モデルまたはサブモデルについての所望の行列相対ゲイン基準を選択する。これは、底数を計算するために使用される。モデルゲインは、予測モデルから抽出され、その大きさは、計算された底数の四捨五入された数の累乗となるように修正される。 (もっと読む)
システムの最適制御方法
【課題】予見不可能な時変目標値に追従する有限評価区間の非線形最適制御問題の制御則を導くことが課題である.
【解決手段】Receding Horizon制御を用いた非線形最適制御問題の近似解法を開発し,非線形システムの実時間制御に適用できる一般的手法を導いた.
具体例としてRR車の旋回限界域におけるDYCの目標横すべり角追従制御に適用した結果、一般的な比例制御に比べ追従性(応答性と収束性とも)が大幅に向上できることを確認した.また旋回限界域においてもニュートラルステア特性を実現できることを明らかにした.
(もっと読む)
シミュレーション方法、シミュレーション装置およびプログラム
【課題】新しいモデルを用いた比較的簡単なシミュレーション方法、シミュレーション装置およびプログラムを提供する。
【解決手段】モデルの対象の状態に応じて、モデルの構造を、熱容量項8−1,8−2を含む第1の構造、熱容量項8−1,8−2および熱伝導項9を含む第2の構造、または、熱容量項8−1,8−2、熱伝導項9および熱伝達項10−1,10−2を含む第3の構造に切り替えるようにしている。
(もっと読む)
リアルタイムコントローラにおけるモデル予測制御のための方法及び装置
【課題】機械(30)への負荷を制御するための方法(300)及び装置を提供する。
【解決手段】本方法は、機械の予測モデルを使用して、プロセス変量と関係した制御出力値を予測周期にわたって実質的に一定に保持しながら、プロセス変量の最大値を決定する段階(304)と、決定したプロセス変量の最大値が許容限界範囲内にある場合には、制御出力値をインクリメントする段階(312)と、制御出力値を、プロセス値に許容範囲を越えることを引き起こさせなかった最終のプロセス変量値に設定する段階(318)とを含む。
(もっと読む)
状態判定装置および状態判定方法
【課題】不可測な外的要因に依存して操作量の平衡点が移動する可能性のある制御対象に対しても適切な状態判定を行う。
【解決手段】状態判定装置は、制御量PVと操作量MVの時系列データについてステップ応答前半の過渡状態のデータを特定する過渡状態データ特定部3と、制御量PVと操作量MVの時系列データのうちの過渡状態のデータにより制御対象のモデル数式を同定する制御対象モデリング部4と、モデル数式に基づいて動的プロセスゲインとプロセス時定数との比率を算出するゲイン時定数比算出部5と、制御対象が特定の状態にある場合の比率の数値範囲を示す判定基準を予め記憶する判定基準記憶部6と、比率と判定基準とを比較して、制御対象の状態が特定の状態にあるか否かを判定する状態判定部7とを有する。
(もっと読む)
ロボット制御装置
【課題】 コンベア等の搬送装置におけるロボットの作業対象物の移動量の変化が大きくても高速高精度な追従作業を実行可能なロボット制御装置を得る。
【解決手段】 ロボット制御装置において、搬送装置位置検出部と、搬送装置位置生成部と、搬送装置位置生成部で得られたロボットの指令値を生成する搬送装置移動量生成部と、ロボットの搬送装置に対する追従誤差を記憶しておく追従誤差記憶部と、ロボットの追従遅れを補正する追従遅れ補正量を求め、追従遅れ補正量と追従誤差記憶部に記憶された追従誤差より追従目標移動量を生成する追従遅れ補正部と、追従遅れ補正部で生成された追従目標移動量から次制御周期の追従移動量を生成する追従移動量生成部とを備えるようにした。
(もっと読む)
最適制御方法、最適制御システム、統括制御装置およびローカル制御装置
【課題】複数の制御パラメータの最適化を可能とし、かつ、その制御システムの構築に要する時間と工数とを低減することを可能にする。
【解決手段】最適制御システム10は、ローカル装置4を制御するローカル制御部31と、複数のローカル制御部31を統合的に制御する統括制御装置2と、ローカル制御部31と統括制御装置2との間にあって、その間で送受信される制御情報を標準化する制御情報標準化インタフェース1とからなる。そして、制御情報標準化インタフェース1は、ローカル装置4の制御について所定の標準物理量で表した制約条件、評価関数、属性情報を記憶した制御条件情報記憶部12と、ローカル装置4から取得されるローカル物理状態量を標準物理状態量に変換するとともに、統括制御装置2によって算出された最適制御目標値をローカル制御目標値に変換する物理量変換部11とを備える。
(もっと読む)
シミュレータ、シミュレーション方法、及びプログラム
【課題】電磁誘導が生じるインダクタンス素子を含む回路において、インダクタンス素子のインダクタンスの時間的変化を精度よく算出しつつ当該回路を高速にシミュレートすることができるシミュレータを提供すること。
【解決手段】コイルを含む回路及びコイルに磁気的に結合された可動部の運動をシミュレートするシミュレータは、所定の時間ステップとその前の時間ステップとの間におけるコイルへの電流値及び可動部の位置のそれぞれの差である電流変化量及び位置変化量が所定の閾値より大きいか否かを判断し、電流変化量又は位置変化量が閾値より大きい場合に所定の時間ステップにおける電流値及び可動部の位置に基づいてコイルのインダクタンスLを算出し、算出したLを記憶するとともに記憶したLを出力する。電流変化量及び位置変化量が閾値以下である場合にはLを算出させず、記憶されている前の時間ステップにおけるLを出力する。
(もっと読む)
解の開始推定が実行不可能かつ一貫性のない二次計画法において、効力をもつ制約の良好な開始推定を利用するシステムおよび方法
【課題】初期推定(xf)が実行不可能な場合であっても、開始時に問題を緩和しないアルゴリズムが提供される。
【解決手段】従来の方法のかわりに、このアルゴリズムでは、有効制約集合の初期推定を使用して、問題を緩和せずにEQPを解く。この最初のEQPの解が最適ではないが実行可能な場合、これを実行可能な点の推定として使用することができる。これは、初期有効制約集合と一貫性のある実行可能な点であるという利点を有するが、従来の方法で使用される初期推定は、必ずしもそうではない。
(もっと読む)
制御対象のパラメータ同定方法
【課題】大掛かりなアルゴリズムを必要とせず、現場でオンラインの状態にあっても制御対象のパラメータを特定できるパラメータ同定方法を提供する。
【解決手段】数学モデルで近似できかつ伝達関数のパラメータが未知の制御対象を持つシステムにおいて、制御対象の伝達関数を数学モデルに基づいて状態変数線図に展開した状態変数制御ブロックを作成し、制御対象への入力uを状態変数制御ブロックにも入力し、当該状態変数制御ブロックの出力Ymと制御対象の出力Ypとの偏差eを求め、偏差eと偏差eの積分値または微分値とを一方に係数を掛けた上で加算し、当該加算値hが0より大きければ+1を、0より小さければ−1を出力するシグナム関数に入力し、シグナム関数の出力fを積分した積分値を状態変数制御ブロックの操作入力とし、状態変数制御ブロックの直達項乃至状態変数の係数を変化させる。
(もっと読む)
同時プロセスシミュレーションを伴う多目的予測プロセス最適化
プロセスを制御するためのシステムと方法には、プロセスのシミュレーションを行いプロセスの模擬出力を生成することと、プロセスからの被測定入力に基づき、且つプロセスシミュレーターからの模擬出力に基づいて、一式の目標値を開発することと、プロセス制御システムの各作動サイクル中に一式の目標値に基づいてプロセスを制御するように構成された複数の制御出力を生成することとが含まれる。模擬出力には、プロセスの定常状態にいたるまでの一つ又は複数の予測将来値が含まれる。  (もっと読む)
(もっと読む)
81 - 100 / 126
[ Back to top ]