
Fターム[5H004KC27]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 予測制御 (384) | モデルを用いるもの (198)
Fターム[5H004KC27]の下位に属するFターム
モデルを作成、修正するもの (72)
Fターム[5H004KC27]に分類される特許
41 - 60 / 126
プラント運転制御装置
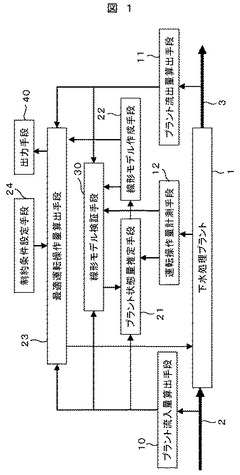
【課題】短い制御周期で運転操作量を算出するプラント制御装置を提供する。
【解決手段】プラントのプロセスを模擬した非線形モデルにより、流入量及び流入水質の履歴及び運転操作量の履歴から現在のプラント状態量を推定し、推定された状態量近傍で非線形モデルを線形化し、入力制約条件,出力制約条件及び最小化制約条件とを設定する制約条件設定手段と、流入水の流入量及び流入水質,制約条件に基づいて線形モデルを用いて運転機器の運転操作量を算出する運転操作量算出手段と、線形モデルにより算出された処理水質と、計測された処理水質との誤差である線形誤差が、線形許容誤差を超過した場合は、プラント状態量推定手段及び線形モデル作成手段により線形モデルを作成する線形モデル検証手段とを備えた。
(もっと読む)
分散型電力生産システムおよびその制御の方法
本発明は、2つ以上の電力ユニットが、電源属性のそれぞれの組を含む、分散型電力生産システムに関するものである。電源属性の各組は、個々の電力ユニットの動的動作状態に関連する。 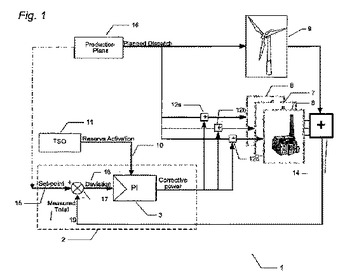 (もっと読む)
(もっと読む)
モデル不一致を補償するためチューニング可能積分コンポーネントを備えるモデル予測コントローラ
MPCコントローラ技法はMPCタイプのコントローラで今日一般的に使われている方法より良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で従来のMPC技法より良好に機能するMPCコントローラをもたらす。具体的には、チューニング可能積分ブロックをMPCコントローラに加えることでMPCコントローラの性能が強化される。このチューニング可能積分ブロックは、予測誤差や他の制御誤差を示す積分コンポーネントを形成し、このコンポーネントをMPCコントローラアルゴリズムの出力へ加えることで、予測誤差のそもそもの究極的理由であるモデル不一致の存在下でより迅速又は良好な制御を提供する。この技法により、MPCコントローラはより速やかに反応し、且つMPCコントローラのロバスト性を低下させることなく、モデル不一致の存在下でより良好な設定点変更及び負荷変動性能を提供することが可能となる。  (もっと読む)
(もっと読む)
インバータシステムの無駄時間補償装置

【課題】制御対象に非線形要素を含んでいても、直接制御対象モデルに組み込んでスミス予測器を具備した無駄時間補償装置及びその方法を提供する。
【解決手段】無駄時間を有する制御対象として、当該制御対象におけるフィードバック制御系の安定性を保つための無駄時間補償装置であって、非線形要素を含む制御対象G(s)e-sLと同じ応答特性を有するモデル回路P(s)を、オペアンプ回路によるアナログ計算機、又はFPGA回路のハードウエア回路で実装したスミス予測器を具備し、前記モデル回路P(s)に、前記制御対象と同じ信号を入力して出力信号を取得し、前記取得した出力信号をフィードバック制御系に負帰還させ、さらに前記取得した出力信号を、前記制御対象と同じ無駄時間要素e-sLに入力し、前記入力した無駄時間要素e-sLの出力信号と前記制御対象の出力信号の差分信号を、フィードバック制御系に負帰還させている。
(もっと読む)
多変量モデルによる製造工程の制御
多変量モデルを用いて製造工程(バッチ型または連続型)を制御する方法、コントローラ、およびシステムを説明する。従属変数データおよび操作変数データが受信される。従属変数データは、複数のセンサからの非制御工程パラメータの値を代表する。操作変数データは、複数の工程ツールの制御可能工程パラメータの制御または設定点値を代表する。予測動作値、多変量統計量、または両方が、受信したデータに基づいて決定され、製造工程の動作パラメータが、予測スコア、多変量統計量、または両方に基づいて決定される。  (もっと読む)
(もっと読む)
予測制御方法および予測制御システム
【課題】制御対象の出力である被制御量が複数ある多目的制御問題において、制御調整者の経験や試行錯誤による調整作業の労力を低減し、制御対象の特性変化にも適合する。
【解決手段】制御対象の動的モデルを使い、未来の制御対象の出力である被制御量を予測し、それらの予測値がそれぞれの目標値に近づくように操作量を決定する予測制御方法である。複数の被制御量に対する目標値である希求水準の入力を受け入れて希求水準を設定し、希求水準に近い最適解を算出し、最適解を表示し、最適解が所定の基準を満たしていない場合に希求水準を変更する入力を受け入れて希求水準の設定を変更し、上記ステップを繰り返し、最適解が所定の基準を満たしている場合における最適解となる操作量を決定する。
(もっと読む)
プラント制御システムおよび制御方法
【課題】同定波形採取のための同定実験を行わず、プラントの立ち上げデータを用いてプラントの同定、及び、制御パラメータの調整を実現可能とするプラント制御システムを提供する。
【解決手段】システム支援ツール100は、制御装置200内の各部(MPC制御部210,PID制御部220)および制御対象230の起動制御を行って各部を起動する。各部を起動することで、制御量(PV),操作量(MV),設定値(SV)に関する各ゾーン毎のデータを、システム支援ツール100のデータロギング機能を用いて採取する。システム支援ツール100は、立ち上げデータを元に同定機能を用いて、プラントのモデルパラメータを推定する。そして制御パラメータ調整機能を用いて、モデル予測制御(MPC)部210及びPID制御部220に係る制御パラメータを同定結果のモデルパラメータを使って計算する。
(もっと読む)
エネルギ消費効率を制御するシステム及び方法
制御装置は、ビルディングオートメーションシステムと情報を交換するように構成されている。制御装置は、実時間の動作効率を決定して、予測又は理論上の動作効率をシミュレートして、これらを比較して、次に、建物のHVACシステムによって利用されている機器に対する1つ以上の動作パラメータを調節するために、様々な実行可能命令を含んでいる。制御装置は、HVACシステムの動作効率を調節するように動作する。制御装置によって利用される調節モジュールは、様々なHVACの機器が、自然動作曲線近くで、オンラインで、並列に動作する可能性に基づいて、HVACの機器のパラメータを修正し得る。更に、調節モジュールは自己学習の態様を含み得る。自己学習の態様により、制御装置は、同様の将来の調節を必要に応じてより効率的に行うことができる。 (もっと読む)
システム操作者支援のための支援制御装置を備えたシステム、制御操作支援装置、制御操作支援方法、運転操作支援装置、及び運転操作支援方法
走行目標経路生成回路が、制御対象物の現在位置から制御対象物が将来走行することができる走行目標経路を算出し、理想制御信号算出回路が、走行目標経路Pに沿って走行するための制御プロフィールS’を算出し、差異算出回路が、理想制御の大きさS’と制御の現在の大きさS’との差異δを算出する。そして、制御システム支援制御装置は、算出された差異δの大きさに基づいて制御システムを制御することにより、操作者の制御操作を支援する。これにより、理想的な制御状態、操作者の制御操作状態、環境状態及び要求される操作精度からの差異δの大きさの関数である制御操作の支援を運転者に提供することができるので、操作者、環境及び制御対象物を特徴づける諸条件に適した制御操作支援制御を出力することができる。 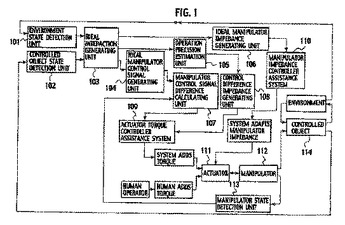 (もっと読む)
(もっと読む)
温度制御方法、温度制御装置および温度制御用プログラム
【課題】反応プロセスにおいて、反応状態の変化など不測な外乱が生じた場合でも良好な温度制御性を確保できる温度制御方法、温度制御装置および温度制御用プログラムを提供する。
【解決手段】反応塔のように反応容器内に温度分布を持ち、反応容器内を流体が入口方向から出口方向に向かって流れる反応プロセスの多点温度制御において、操作量と制御量の関係を表した予測モデルに、流動による温度検出部位間の熱伝達を考慮したモデルを設けて予測制御することで、反応状態の変化など不測な外乱が生じた場合でも良好な温度制御性を得ることができる。
(もっと読む)
繰り返して実行される作動サイクルを持つ制御対象のフィードバック制御を行うための方法および制御配列
繰り返して実行される作動サイクルを持つ配列のフィードバック制御に際しては、例えばエンジン・テストスタンドにおいては、被験体(例えばエンジン)により、前記配列の作動周波数域で共振が励振されることがたびたびあるが、これは、フィードバック制御により減衰することができる。そのために本発明により、フィードバック制御の一つの現時点の実際値rist_aktと、以前に行われたいずれか一回の作動サイクルにおける実際値に基づいて、間近に生じるシステム・ディレイを随伴しない一つの実際値を予測した一つの値とから、一つの修正後の実際値rist_modを算出して、これを制御にフィードバックする制御コンセプトが提案される。 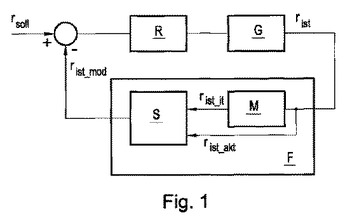 (もっと読む)
(もっと読む)
車両の駆動力制御装置
【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
モデル予測制御装置、プログラム
【課題】制約付きモデル予測制御において制約の緩和回数が増えて実行時間オーバを起こす可能性を低くする。
【解決手段】条件付き最適化計算に用いる制約の復帰処理において、現在の制御量検出値yが特定の制約復帰条件を満たすかどうかを判断し(ステップS21)、満たす場合のみ制約緩和レベルは一段復帰させる(ステップS22)。所定の制約復帰条件を満たさない限り制御量制約の復帰を行わないようにすることで、制約付き最適化計算において解なしとなる可能性を低くし、以って、制約の緩和が再度必要になる可能性を低くできる。これより、計算負荷が大きい制約付き最適化処理の頻度が大きくなることを防止し、実行時間増大を防止できる。
(もっと読む)
モデル予測制御装置
【課題】モデル予測制御の実行中になんらかの制御計算上の不具合が発生した場合に、安全のため上位のモデル予測制御系を切り離し、滑らかに下位制御系のみの制御へ移行して制御を継続することができるモデル予測制御装置を提供する。
【解決手段】目標値生成器10、モデル予測制御器(MPC)20、切替器100、下位制御器(LC)30、および、制御対象(P)40から構成される。通常では、切替信号FLG_LCはフラグが0の状態に置かれてMPC20による最適化処理が実行される。しかし、MPC20内の最適化処理が重くなり、たとえば実行時間が制御周期内に収まらない事態が発生したと判断された場合には、MPC20は切替信号FLG_LCのフラグを1に切り替える。このフラグ“1”は切替器100に伝えられ、切替器100はMPC20利用の状態から下位制御系のみの状態へ滑らかに移行する。
(もっと読む)
制御装置
【課題】複数の制御対象箇所を有する制御対象プロセスの物理状態を制御する制御装置において、各制御対象箇所を特定の制御対象箇所に追随させながら全体的に制御することが可能なモデル予測制御装置を提供すること。
【解決手段】目標とする物理状態を示す目標値とその目標値との差分、プロセスモデル、制約条件および物理状態に関して検出した検出値に基づいてモデル予測制御を行い、操作量を出力する際、第1の制御対象箇所に関する検出値と第2の制御対象箇所に関する検出値との差分を算出し、第1の制御対象箇所に関する検出値と算出した差分とを物理状態検出情報としてモデル予測制御への入力に用いる。
(もっと読む)
内燃機関の空燃比制御装置
【課題】経年変化によらず内燃機関の運転状態を正確に判定し、判定された運転状態に応じて高精度な制御が可能な内燃機関の空燃比制御装置を提供する。
【解決手段】内燃機関の空燃比制御装置が、実際の燃料噴射量である実燃料噴射量u及びその噴射による空燃比である実空燃比yを保存する記憶手段と、保存された実燃料噴射量u及び実空燃比yに基づいて所定時間経過後の内燃機関の運転状態である先読み運転状態fcを推定する運転状態推定手段と、保存された実燃料噴射量u及び実空燃比y並びに先読み運転状態fcに基づいて前記所定時間経過後の空燃比である先読み空燃比faを推定する空燃比推定手段と、先読み空燃比faに基づいて燃料噴射量を補正する燃料噴射量補正手段とを具備する。
(もっと読む)
データ処理装置、データ処理方法、及びプログラム
【課題】ロボット等のエージェントが、汎化が可能な範囲で目標をたて、その目標を達成する行動を、迅速にとる。
【解決手段】生成装置20では、時系列データ予測部21が、時系列データを予測するための予測モデルとしてのRNNを用い、時系列データの入力に対して、時系列データの予測値を求める。さらに、目標決定部22が、時系列データの予測値に基づき、時系列データの目標値を決定し、誤差計算部23が、予測値の、目標値に対する誤差を計算する。そして、時系列データ探索部24が、予測値の誤差を減少させる、RNNへの時系列データの入力である誤差減少データを探索する。本発明は、例えば、ロボット等のエージェントを制御する場合に適用できる。
(もっと読む)
プロセス制御システムにおける統合型モデル予測制御および最適化
【課題】最適化ルーチンおよび多重入力/多重出力制御ルーチンを実現する統合型最適化・制御ブロックを作成または閲覧する際に利用されるプロセス制御コンフィギュレーションシステムを提供する。
【解決手段】コンフィギュレーションシステムにより、オプチマイザまたは制御ルーチンをユーザが表示または設定できるようになる。格納ルーチンは、最適化ルーチンおよび/または制御ルーチンにより用いられる複数の制御変数および補助変数ならびに複数の操作変数に属する情報を格納しうる、表示ルーチンは、前記複数の制御変数および補助変数ならびに前記複数の操作変数に属する前記情報に関する表示画面をユーザに提示しうる。
(もっと読む)
モーションコントローラ、シミュレーション方法及びシミュレーションプログラム
【課題】装置実機を必要としないシミュレーションを実時間で行うことのできるモーションコントローラ、シミュレーション方法及びシミュレーションプログラムを提供すること。
【解決手段】モーションコントローラは、装置の動作を制御するためのモーションプログラムの実行処理を所定時間毎に行う動作実行部と、所定時間毎に行われる動作実行部による処理後の空き時間に、装置の動作のシミュレーションを行うシミュレーション実行部と、を備える。
(もっと読む)
モデル予測制御を使用した離散供給チェーンの制御および最適化のためのシステムおよび方法
システムは、1つの処理設備100、500に関連する複数の処理110、510〜570を監視し、処理設備を最適化するための制御データを生成するよう構成された第1のコントローラ120を含む。システムは、制御データの少なくとも一部を変更するために変動計算の確率解析を使用するよう構成された第2のコントローラ130も含む。第2のコントローラは、離散供給チェーンの制御および最適化を処理設備に提供し、離散供給チェーン製造処理によって製造される製品に対する複数の需要要件および複数の出荷要件のうちの少なくとも1つを記録するよう構成されている。システムは、さらに複数の処理を制御し、処理設備を最適化するために制御データに従って動作するよう構成された複数の第3のコントローラ125a〜125fも含む。  (もっと読む)
(もっと読む)
41 - 60 / 126
[ Back to top ]