
Fターム[5H004KC52]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | 設定値の変動に対するもの (12)
Fターム[5H004KC52]に分類される特許
1 - 12 / 12
モータ制御回路
【課題】モータの速度を可変制御するモータ制御回路において、設定されるモータの速度に応じた適切な制御ゲインを自動的に設定可能なモータ制御回路を提供する。
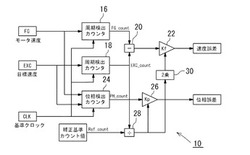
【解決手段】本発明に係るモータ制御回路10は、速度検出手段FGから入力される検出信号の周期FG_countと外部から入力される基準信号EXCの周期EXC_countとの差に応じた周期誤差信号を出力する周期誤差信号出力手段20と、周期誤差信号に速度ゲインを乗算して得られる速度誤差信号を出力する速度誤差信号出力手段22と、基準信号EXCの周期EXC_countに対する補正基準周期Ref_countの比を補正量とし、その補正量を2乗して速度誤差信号出力手段22が備える所定の速度ゲインKfに乗算することにより、所定の速度ゲインKfを補正するゲイン補正手段28、30とを備えている。
(もっと読む)
プラント運転支援装置及びプラント運転支援方法

【課題】オペレータの操作負担を軽減できる運転支援装置及び運転支援方法を提供する。
【解決手段】 入力インターフェース71は、予測シミュレーションの目的を指定し、判定手段72は、仮想操作変数に基づく定常状態予測シミュレータ5による予測結果が、前記目的を満たすか否かを判定する。判定の結果、前記予測結果が前記目的を満たさない場合に、入力手段73は、前記仮想操作変数を更新して前記定常状態予測シミュレータ5に入力する。
(もっと読む)
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
物理量制御装置、物理量制御方法及び物理量制御プログラム
【課題】ザゼンソウ型制御アルゴリズムと、従来の汎用制御アルゴリズムとを融合させ、広範囲な制御対象に対して適応した物理量制御アルゴリズムを提供する。
【解決手段】温度制御装置は、遅延器1、温度センサー3、第1のザゼンソウ型制御部、第2のPID制御部11、エネルギー発生器4,ヒーター5、混合器21を備え、第1のザゼンソウ型制御部は現在温度と前回温度との時間変化勾配をパラメータとし、第2のPID制御部11は現在温度と目標温度との差をパラメータとし、第1のザゼンソウ型制御部と第2のPID制御部11が並列に接続されることを特徴とする。
(もっと読む)
適応制御装置
【課題】 人工衛星の姿勢について適応制御を行う際、未知のパラメータの随時更新によって、推定及び更新項がフィードバック制御系ゲインに加えられることになり、見かけ上ゲインが変更されたことになり、制御系安定性に影響を与えるため、制御系設計上の制約が大きくなるという問題があった。
【解決手段】 未知パラメータの推定及び更新を、姿勢変更開始から終了までの間で非随時とすることで、姿勢変更時に発生する姿勢角度誤差を、当該更新以降で抑制することによって、制御系の安定性を損なうことなく外乱を抑制することができる。
(もっと読む)
プラントの制御装置
【課題】 偏差に基づく補償動作の遅れを補い、目標値の変動に遅れなく追従し、応答性を向上させる。
【解決手段】 設定された目標値と制御量との偏差に基づいて、フィードバック制御するプラントの制御装置30であって、バルブ13に入力されるバルブ開度Vと制御対象から出力される流量fとの入出力特性をあらかじめ記憶し、この入出力特性に基づき、目標値に対応するバルブ開度Vを特定するとともに、目標値が変動するタイミングにおいて、変動する目標値から特定されるバルブ開度Vをバルブ13に入力するフィードフォワード制御手段と、を備える構成としてある。
(もっと読む)
システムを制御するための装置および方法
【課題】適応制御は通常、システムパラメータを推定するために、精密なプロセスモデル又はこれらのモデルの近似を必要とする。
【解決手段】適応カスケード比例積分微分コントローラは、固定比例積分微分コントローラコマンド及び固定フィードフォワードコントローラコマンドを含む固定コントローラ出力と、適応カスケードPIDコマンド及び適応フィードフォワードコマンドを含む適応コントローラ出力とを生成し、上記コマンドはすべて参照コマンドから得られる。固定コントローラ出力及び適応コントローラ出力は、加算されて、被制御システムのための制御コマンドを生成する。当該被制御システムは、コントローラに対するフィードバックとして、出力の測定値及び出力の変化率を提供する。
(もっと読む)
システム制御装置及びシステム制御方法
【課題】出力と、出力率フィードバック信号と、参照コマンドとを使用して、適応PIDゲインを動的に調整するための、適応PIDコントローラ及び方法を提供する。
【解決手段】適応並列比例積分微分コントローラは、固定比例積分微分コントローラコマンド、及び固定フィードフォワードコントローラコマンドを含む、固定コントローラ出力と、適応並列PIDコマンド及び適応フィードフォワードコマンドを含む、適応コントローラ出力とを生成する。上記コマンドはすべて参照コマンドから得られる。固定コントローラ出力及び適応コントローラ出力は、加算されて、被制御システムのための制御コマンドを生成する。当該被制御システムは、コントローラに対するフィードバックとして、出力の測定値及び出力の変化率を提供する。
(もっと読む)
複数入力/出力制約を有する複数入力/出力システム用の多変数コントローラの設計方法
【課題】 複数入力及び/又は出力制約を有する複数入力/出力システム用の多変数コントローラの設計方法を提供する。
【解決手段】 複数の入力及び出力制約を有する複数入力複数出力(MIMO)システム(208)を動的に制御するための方法であって、本方法が備えられる。本方法は、入力及び出力制約が無い状態でシステム(208)の複数の制御参照入力の閉ループトラッキングを実装するようにMIMOトラッキングコントローラ(202)を構成する段階と、複数の制御参照入力に適用される参照修正値を生成することによってMIMOシステム(208)の入力及び出力制約を実現するようにMIMO制約コントローラ(210)を構成する段階とを含む。
(もっと読む)
サーボモータの制御装置
【課題】速度指令あるいは位置指令のプロファイルに左右されることが少なく、滑らかな追従性あるいは整定性を発揮するサーボモータを提供する。
【解決手段】速度指令は指令前置フィルタ106を通過した後、フィードバックループ104に入力される。フィードバックループ104は、サーボモータ101に接続されたエンコーダ103の出力信号に従って、サーボモータ101を速度指令あるいは位置指令に追従するように制御する。フィードバックループ104に内包される制御パラメータの値は、パラメータ設定手段105によって剛性設定に従って設定され、同時に指令前置フィルタ106の遮断周波数もパラメータ設定手段105によって剛性設定に従って設定される。
(もっと読む)
制御装置
【課題】比較的高い周波数で変動する指令入力に制御対象の出力を遅れることなく追従させる制御装置を提供する。
【解決手段】指令入力の変動分の基本波成分の周期の1/N倍の時間毎に1からNまでの整数を鋸波状にインクリメントして出力する位相選択器と、N個のフィルタ群と、前記フィルタ群の中から前記位相選択器の出力で選択された1つのフィルタの入力にフィードフォワード演算器の出力を接続し前記フィルタの出力を選択して出力するフィルタ選択器とを具備し、前記フィルタ選択器の出力を安定化補償装置の出力に加算する。
(もっと読む)
サーボ機構制御系のための適応コマンドフィルタリング
本発明の好適な実施例は、コマンドトラジェクトリの間および/またはその後のサーボ誤差を減少させるために、コマンドトラジェクトリ、サーボ機構制御系(10)のアーキテクチャまたはその両方を修正するための方法を実施する。反復微調整手順は、サーボ機構制御系で使用するために補正入力duを生成し、この補正入力は、サーボ機構制御系出力の要求された値(yd)と、その現実値(y)との間の誤差(e)を著しく減少する。一実施例では、独特に識別されたプラントモデルは、微調整手順の性能および信頼性を改善する近似傾斜を計算するために、反復微調整手順で使用される。他の実施例では、実際のプラント応答が反復微調整手順の特定モデルに代えて使用される。これは、補正入力信号duを更新するために、それをプラント(12)に適用する前に、トレーニング運転から蓄えられた誤差信号を時間反転することによって成し遂げられる。 (もっと読む)
1 - 12 / 12
[ Back to top ]