
Fターム[5H115PC03]の内容
車両の電気的な推進・制動 (204,712) | 車両の形態 (11,802) | 軌道に沿って走行するもの (980) | ガイドウェイ (14)
Fターム[5H115PC03]に分類される特許
1 - 14 / 14
搬送車システム

【課題】搬送車システムにおいて、分岐案内時に分岐ガイドローラを回動自在に支持する回動支持部に作用するモーメント荷重を低減する。
【解決手段】分岐ガイドローラ機構24は、分岐ガイドローラ(36〜39)と、分岐ガイドローラ(36〜39)を支持する第1可動アーム101および第2可動アーム103と、第1可動アーム101および第2可動アーム103を走行車に回動自在に支持する回動支持部51,55(回動支持部)とを有する。分岐ガイドローラ駆動機構40は、走行車に設けられ、分岐ガイドローラ(36〜39)を分岐案内レール部分6eに対してガイド位置・非ガイド位置とで切り替えるために分岐ガイドローラ機構24を駆動する。回動支持部51,55の回動中心Cの高さ位置は、分岐案内レール部分6eにおいて分岐ガイドローラ(36〜39)がガイド位置で接触可能な部分の上下方向幅H1内にある。
(もっと読む)
搬送車システム

【課題】非接触給電方式を採用した搬送車システムにおいて、給電線とコアとの接触を減らす。
【解決手段】搬送車システム1は、軌道2と、非接触給電線209と、複数のホルダ213と、搬送車3と、ピックアップユニット221と、補助電源200とを備えている。軌道2は、直線部と、分岐部または合流部とを有する。非接触給電線209は、軌道2に沿って配置されており、軌道2の直線部(例えば、第1直線部201、第2直線部202、第3直線部204、第4直線部205)のみに配置されている。ホルダ213は、軌道2に沿って配置され、鉛直方向に延びて非接触給電線209を支持する。搬送車3は、軌道2を走行する。ピックアップユニット221は、搬送車3に設けられ、非接触給電線209に対して近接しており鉛直方向を向いた開口229,230を有する。補助電源200は、搬送車3に設けられている。
(もっと読む)
物品搬送装置
【課題】台車ユニットの蓄電手段に対する充電作業を安全に行うことができる物品搬送装置を提供すること。
【解決手段】搬送経路に沿って配設された走行レール3と、搬送物支持部材を吊り下げた状態で走行レール3上を走行可能な走行台車9を有する台車ユニットと、を備え、物品を搬送物支持部材に積載して搬送経路に沿って搬送する物品搬送装置において、台車ユニットは、走行台車9を走行レール3上で走行させる駆動手段と、駆動手段に電力を供給する蓄電手段と、を有し、蓄電手段を充電する充電手段6が搬送経路の一部に配置され、走行台車9には、充電手段6の給電部52に連結されて給電される被給電部24a,24dが設けられる。
(もっと読む)
物品搬送装置
【課題】走行レールが直線路であるか曲線路であるか、または被検出体が近接しているか否か等の台車ユニットの近傍の状況を確実に検出できる物品搬送装置を提供すること。
【解決手段】物品2を搬送物支持部材に積載して搬送経路に沿って搬送する物品搬送装置において、台車ユニットは、少なくとも前後2つの走行台車8,9と、走行台車8,9を走行レール3上で走行させる駆動手段17と、駆動手段17を制御する制御手段29と、を有し、少なくとも1つの走行台車8には、走行レール3上を走行可能であるとともに走行台車8の近傍の状況を検出する検出手段40,48,51を有する補助台車10が左右に揺動可能に連結され、検出手段40,48,51により検出された検出情報に基づいて制御手段が駆動手段17を制御する。
(もっと読む)
物品搬送装置
【課題】充電によって台車ユニットの運用効率の低下をまねくことなく、台車ユニットの蓄電装置を充電することができる物品搬送装置を提供すること。
【解決手段】搬送経路に沿って配設された走行レール3と、搬送物支持部材5を吊り下げた状態で走行レール3上を走行可能な走行台車6を有する台車ユニット4と、を備え、物品2を搬送物支持部材5に積載して搬送経路に沿って搬送する物品搬送装置において、走行台車6は、走行台車6を走行レール3上で走行させる駆動手段を有するとともに、台車ユニット4は、駆動手段に電力を供給する蓄電装置15を有し、この蓄電装置15が数秒から数分以内で充電可能となっている。
(もっと読む)
車両接地検出装置及びその方法並びに車両
【課題】車両の接地状態を検出することの可能な車両接地検出装置を提供する。
【解決手段】車両の車体と電気的に接続され且つ車両軌道に設置された接地部材に対して接触可能に配置された主導電部材と、前記主導電部材と並列に且つ前記接地部材に対して接触可能に配置された副導電部材と、前記主導電部材及び副導電部材を介して電流が流れるか否かを検出することにより、前記車両の接地状態を検出する電流検出回路とを用いて車両接地検出装置を構成する。
(もっと読む)
バッテリ充電システム
【課題】充電用搬送車の前方に充電を要しない荷物運搬用搬送車が位置している場合でも、その影響を受けずに、更にその先に存在する充電の必要な荷物運搬用搬送車に直結して充電用搬送車から充電することを可能にする。
【構成】荷物運搬用搬送車4の搬送車本体の底面14を所定距離だけ床面1より高くして充電用搬送車8が潜り抜けできる通過空間15を形成する。充電用搬送車8または荷物運搬用搬送車4には、非充電時に充電用搬送車8の潜り抜けを許す非作用位置とされ、充電時に荷物運搬用搬送車4または充電用搬送車8に達する作用位置まで突出する接続用柱19を設ける。荷物運搬用搬送車4または充電用搬送車8には、充電時に充電用搬送車8または荷物運搬用搬送車4から突出する前記接続用柱19を受け入れて、充電用搬送車8に搭載した充電装置18との電気的な接続をなす接続受け部21を設ける。
(もっと読む)
充電システム及び充電方法
【課題】 大きな寸法の送電装置及び受電装置を使用し、かつ送電装置の駆動機構を無くしたり、あるいは簡素化することによって、十分な充電時間を確保することが可能となり、車両の上下動による送電装置と受電装置との接触を避け、地上側の送電装置を周辺機器と干渉させることなく設置するとともに、車両側の受電装置をデッドスペースなどを有効に利用して設置することが可能な充電システム及び充電方法を提供することにある。
【解決手段】本発明は、蓄電池3を搭載した車両1が、地上に設置された充電設備10から電力の供給を受け、予め設定された経路を走行する交通システムの充電システムにおいて、充電設備10に複数の地上送電装置14を縦置きにして設けるとともに、車両1の前後部側面に車載受電装置4を縦置きにしてそれぞれ設け、地上送電装置14と車載受電装置4とを互いに対向させて蓄電池3の充電を行うように構成している。
(もっと読む)
車両
【課題】障害物との接触を識別すると車両加速度の目標値を制限することによって、障害物に接触したときにも安定した走行状態及び安定した姿勢制御を実現することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の姿勢を考慮して路面勾(こう)配を推定する勾配推定手段と、障害物と接触したか否かを識別する接触識別手段と、該接触識別手段が障害物との接触を認識すると、前記勾配推定手段が推定した路面勾配に基づいて車両加速度の目標値を制限する加速度制限手段とを備える。
(もっと読む)
自動案内車両の接地装置
自動案内車両を電気的に接地することに関連して用いられる装置及び方法である。接地ストラップが自動案内車両から懸垂され、該接地ストラップが該自動案内車両の走行通路に沿って床に設置された導電性の接地部材と接触するように構成される。動作において、該接地ストラップは導電性部材と接触し、これによって該自動案内車両と関連して使用される電子機器を電気的に接地する。 (もっと読む)
線形誘導モーターを備える個別用高速輸送システムにおける制御及び安全制動方法及び装置
一つ以上のモーターを含む車両推進システムを含む個別用高速輸送システムにおける一つ以上の車両がトラックに沿って移動するとき、前記一つ以上の車両の車両速度を制御するための速度制御システムであって、それぞれのモーターは前記一つ以上の車両の中で一つの車両を推進するための推力を生成するようになり、個別用高速輸送システムにおける車両速度を制御するための速度制御システムは、前記一つ以上の車両の前記車両速度を制御するように、車両位置及び/または速度センサーから受信した一つ以上のセンサー信号に基づいて前記モーターの中で少なくとも一つのモーターによって生成された前記推力を制御するようになる速度調節サブシステム、及び前記一つ以上の車両の中でそれぞれの車両内に含まれて、前記速度調節サブシステムによる車両速度制御とは無関係に、前記車両上に装着された非常ブレーキを作動させるようになる車両制御システムを含む。 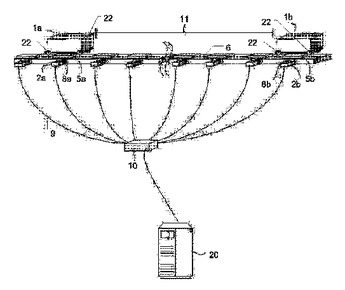 (もっと読む)
(もっと読む)
車両の誘導装置
【課題】車両走行経路側のガイドレール6の垂直案内面6aに車両1側の被案内部7を圧接移動させて当該車両1をガイドレール6に沿って自動追従走行させる車両の誘導装置において、車両1側に向けられる左右一対の駆動車輪3a,3bを向き固定して構成を簡単にする。
【解決手段】左右両駆動車輪3a,3bは直進方向に向き固定され、ガイドレール6に沿って車両1が走行するとき、被案内部7をガイドレール6の垂直案内面6aに押し付ける方向の操向力Sfを車両1に与えるように左右両駆動車輪3a,3bの回転速度Ls,Rsに差を与える制御手段9が設けられた構成。
(もっと読む)
自動走行台車
【課題】低コストで制御や製造をすることができ、不具合が生じにくく、さらに、走行経路を容易に変更することができる自動走行台車を提供すること。
【解決手段】走行経路3,4を自動走行する自動走行台車1,2であって、他の自動走行台車1,2の探知を行う障害物センサ13と、この障害物センサ13によって探知された他の自動走行台車1,2の位置が基準範囲14内であるときに走行停止制御または減速制御が行われる走行部と、前記走行経路3,4に沿って配置されたマーカ8,9,11,12を検出するマーカ検出部と、前記マーカ検出部によるマーカ8,9,11,12の検出結果に基づいて前記基準範囲14を変更する制御部7,10とを備えている。
(もっと読む)
共同輸送電動車両用タイヤ走行自動誘導接地恒久監視装置
本装置は誘導レールに沿って走行するローラー(26)と(27)によって各自動誘導ユニット(16)に取付けられる金属製誘導レール(2)上を走行する2つの摩擦または滑動のすべり座(28)と(29)のペアのユニットを特徴とする。誘導レール(2)と一緒に、すべり座(28)と(29)及び誘導レール(2)を経由する電気的接地が適切である時に、前記すべり座(28)と(29)は電流が流れる低圧(BT+ 及び BT-)発電機回路によって供給される安全回路を伴う検知器を含む電気回路を形成する。すべり座(27)および(28)における電気接触の質に応じて、安全回路が潜在的なリスクの有無を示して開閉する。本発明はタイヤ走行の自動誘導公共輸送車両のメーカーに有益なものである。  (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]