
Fターム[5H115SE05]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | エンジン (1,876)
Fターム[5H115SE05]に分類される特許
1,861 - 1,876 / 1,876
モータ冷却システム
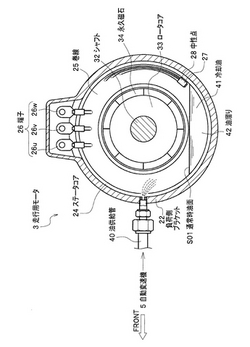
【課題】 ハイブリッド車等に搭載された走行用モータの中性点を効果的に冷却する技術を提供する。
【解決手段】 走行用モータ3の内部空間の下部には、油供給管40から供給されたATFを冷却油41として貯留する油溜り42が形成されている。中性点28は、ハイブリッド車1が平坦路で停止した状態で、油溜り21の通常時油面SO1の直上に位置している。加速走行時において、油溜り21に溜まった冷却油41は、慣性によって後方に寄り、その油面が通常時油面SO1(二点鎖線で示す)から傾いて高負荷時油面SO2に変化する。これにより、中性点28は、油溜り21中の冷却油41に浸漬される
(もっと読む)
ハイブリッド変速機搭載車のエンジン始動方法

【課題】バッテリがエンジンをクランキングできるほどに蓄電されていない電力不足状態の基でも、バッテリによって停車状態でのエンジン始動を可能にする。
【解決手段】S6でバッテリ蓄電電力がエンジン始動可能判定値Pb未満であると判定される場合、S7でパーキングブレーキの作動を指令すると共に、エンジンクラッチE/Cの解放を指令する。 次にS8で、モータ/ジェネレータMG1,MG2を起動し、S9で、MG1,MG2の回転に伴って生ずるイナーシャによりエンジンをクランキングさせる方向のトルクTmg1,Tmg2が発生するようMG1,MG2の回転数Nmg1,Nmg2を上昇させる。この時、エンジンに係わる回転要素は前進回転するが、S7でE/Cを解放しているため、エンジン回転数は0のままである。S10でTmg1≧Te、Tmg2≧Teと判定する時、S11でE/Cを締結させてエンジンをクランキングし、その間にエンジンへの点火を行うことで、MG1,MG2の回転に伴うイナーシャ(Tmg1,Tmg2)によりエンジンを始動させ得る。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法
【課題】 内燃機関を安定して目標回転数で運転しながら内燃機関側の反力を用いて発電機から駆動軸に駆動力を出力する。
【解決手段】 遊星歯車機構を介して内燃機関と発電機と駆動軸とが接続されると共に駆動軸に電動機が接続された自動車において、電動機が駆動不能状態となったときには、内燃機関の目標回転数と現在の回転数との偏差に基づいてフィードバック制御における関係式により基本スロットル開度を設定し、発電機から内燃機関側に作用するトルクと内燃機関の回転数の今回値と前回値とに基づいて発電機からの負のトルクの変化により内燃機関側に作用するトルクの変動をキャンセルする補正開度を設定し、両者の和により目標スロットル開度を設定する。内燃機関の反力を用いて発電機から負のトルクを出力して駆動軸に正のトルクを出力する際の発電機の負のトルクの変化に迅速に対応でき、内燃機関を安定して目標回転数で運転できる。
(もっと読む)
インタロック装置
【課題】 高電圧機器の保守および点検作業の早期の段階に安全を確保する。
【解決手段】 インタロック装置570は、インバータユニットが露出不可能な状態にするように設けられ、筐体500に対応する形状を有する上蓋502と、筐体500に接触すると、筐体500と電気的に接続状態となり、筐体500に接触しないと電気的に非接続状態となるインタロック検出端子540と、上蓋502を筐体500に固定するボルト566と、インタロック検出端子540が筐体500に接触されている状態においては、ボルト566の、上蓋502を取り外す動作を制限するブラケット530とを含む。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法
【課題】 エネルギ効率や動力性能の向上を図る。
【解決手段】 遊星歯車機構のサンギヤ,キャリア,リングギヤにそれぞれモータMG1の回転軸,エンジンの出力軸,駆動軸としてのリングギヤ軸32aが接続されると共に変速機60を介してリングギヤ軸32aにモータMG2の回転軸48が接続されたハイブリッド自動車において、モータMG2やその駆動用のインバータに異常が生じた時や高速巡航運転時には、エンジン22から遊星歯車機構を介してリングギヤ軸32aに出力される直達駆動力だけで走行する直行走行モードを設定し、ブレーキB1およびブレーキB2を共にオフとしてモータMG2の回転軸48をリングギヤ軸32aから切り離す。これにより、直行走行モード時にモータMG2が連れ回されることがないから走行抵抗を小さくできる。この結果、エネルギ効率や動力性能を向上させることができる。
(もっと読む)
ハイブリッド駆動装置
本発明は、内燃機関、発電機、及び駆動車輪のドライブトレインに確動的に連結された電動機間の電力分割変速装置を備える自動車のハイブリッド駆動装置に関する。ドライブトレインの回転速度は、毎回、互いに非対称な態様で冗長性のある2つの異なる経路で確定される。  (もっと読む)
(もっと読む)
ハイブリッド車両のエンジン始動時制御方法
【課題】EV走行中のエンジン始動時の加速ショックを低減する。
【解決手段】EV走行中ならば(ステップS10肯定)、実燃料噴射量Qfin、アクセル開度、車速等の走行情報を読み込み(S20)、仮想エンジン回転数NE0を算出し(S30)、当該回転数NE0とアクセル開度に基づいてガバナ特性マップから仮想燃料噴射量Qfin0を算出する(S40)。トルク換算マップを用い目標エンジントルクTEPnと実エンジントルクTETnを算出し、差分トルクΔTEnを算出する(S50)。エンジン始動指令時ならば(S60肯定)、始動直前のトルクTEP(n−1),TET(
n−1)から算出した差分トルクΔTE(n−1)を、始動時の差分トルクΔTEnとして
保持し(S70)、トルクアシスト量Tmgとする(S80)。エンジン始動時でないならば(S60否定)、現在の差分トルクΔTEnをそのままトルクアシスト量Tmgとする(S90、S80)。
(もっと読む)
動力出力装置および自動車並びに動力出力装置の制御方法
【課題】 内燃機関の運転に伴うこもり音の発生を抑制すると共にエネルギ効率の向上を図る。
【解決手段】 エンジンからの動力をプラネタリギヤと二つのモータMG1,MG2とによりトルク変換して駆動軸に出力して走行するハイブリッド自動車において、モータMG1の発電量Pchgに基づいてこもり音の発生を回避するエンジン22の動作ラインを設定し(S140)、この設定した動作ラインに基づいてエンジンとモータMG1,MG2を制御する(S150〜S200)。これにより、エンジンの運転に伴って生じ得るこもり音の発生を抑制すると共にできる限りエンジンを効率よく運転することができる。
(もっと読む)
情報処理装置、及びハイブリッド車両
【課題】 データ精度の低下を抑制しつつ、効率よく走行データを圧縮すること。
【解決手段】 走行データ処理部11は、車両が稼動している間、所定のサンプリングレート(例えば、100[msec]、500[msec]、・・・など)で走行データ(車速、位置情報、時刻など)をサンプリングして一時記憶装置に記憶する。走行終了時に、収集した走行データを分析し、車両が発進してから停止するまでの間の走行データを圧縮の単位とする。走行データの圧縮は、サンプリングした走行データのうち、一定車速に到達した時点(地点)、及び車速の変化が変曲点となる時点で取得した走行データを抽出することにより行う。そして、走行データ処理部11は、抽出した走行データを出力し走行データ記憶部15に記憶する。
(もっと読む)
電気機械的トランスミッションのパワーフロー管理のための方法及び装置
車両用途に指定速度比内で動作する電気機械的パワースプリット無限可変トランスミッション(102)のパワー管理方法。トランスミッションは、パワーを受け取るために駆動エンジン(100)の出力シャフトに連結される入力シャフト(103)、駆動シャフト(104)、電気的機械E1,E2、各々が太陽部材S、リング部材R、一組の遊星部材P及び惑星キャリアCを有する一対の遊星トレーンU1,U2、1以上のトルク移送装置Lを含み、トルク伝達のために遊星トレーンU1,U2の部材を連結・切断する。駆動シャフトは車両のファイナルドライブ(106)と連結され、車両駆動ホイール(105)へのパワーの供給・取出を行う。E1,E2はパワー制御ユニット(120)を通して電気相互接続され、遊星トレーンU1,U2の部材と連結される。パワー管理方法は、入力シャフトと駆動シャフトの現在速度、トルク、所望動作パラメータに基づき選択される。
 (もっと読む)
(もっと読む)
連続無段変速機を有する動力装置の制御方法及び装置
本発明は、エンジントルク抽出モードで、連続無段変速機を有する動力装置の制御方法及び装置に関する。関係するシステムは、熱エンジンと「エンジントルク抽出モード」で動作する連続無段変速機が装備された車両である。本発明によれば、非線形の多変数の包括的なモデルが、分離装置(35)へ送られる複数の中間の値(V1、V2、V3)の変数が、調整装置(34)によって作られるように、決定装置(36)の中で実行される。使用される測定値の信号は、連続無段変速機の電気変速機の電気機械の回転数及びトルクと、電気変速機のエネルギバッファ要素の端子間の電圧である。発生される制御値は、電気機械と熱エンジンのトルクの指令値の信号である。 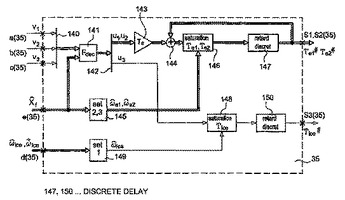 (もっと読む)
(もっと読む)
分離された機械的制御と電気的制御を有する動力装置の制御方法及び装置
本発明は、車両の動力装置の制御方法に関する。本発明は、動力装置による車両の特定の駆動モードに存する。エンジントルク抽出モードにおいては、本制御方法は、電気エネルギのバッファ要素の充電レベル(Ucapa)の測定値と、上記電気機械(Me111、Me212)の回転数(ωe1、ωe2)及び電気機械から供給されるトルク(Te1、Te2)の測定値のみを利用して、第1段階において、熱エンジンのトルク(Tice#)を計算し、車輪へ加えられるトルクと熱エンジンの回転数を同時に調整しながら、推定された機械的な特徴を表わす機械的な制御信号(u0)を作成し;次いで、第2段階において、機械的な制御信号に基づいて第1及び第2の電気機械のトルク(Te1#、Te2#)を計算し、エネルギレベルを調整するエネルギ的な制御信号を作成する;ことからなる。 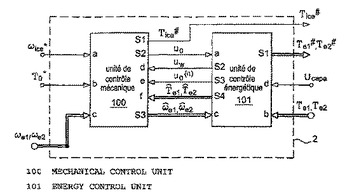 (もっと読む)
(もっと読む)
水陸両用車用の推進システム
水上を滑走することのできる図1に係る水陸両用車(10)は、原動機(20)と、動力伝達手段(30)と、水上推進手段(40)と、陸上推進手段(50)とを備えた推進システムを有する。車(10)は水上モードまたは陸上モードで作動可能である。陸上および水上で共通制御装置が使用される。操舵制御走行は各モードで同一とすることができる。動力は、水上モード時には水上推進手段に、陸上モード時には水上推進手段と陸上推進手段の両方に伝達される。陸上および水上推進手段の間の動力伝達比率は、陸上モード時に変動することができる。推進制御手段(60)は電子処理手段および/または電気的、機械的、油圧式、もしくは電子機械的作動装置、またはそれらのいずれかの組合せとすることができる。原動機(20)は内燃機関、電気モータ、燃料電池、ハイブリッドエンジン、またはそれらのいずれかの組合せとすることができる。伝達手段は機械的、電気的、または油圧式とすることができる。 (もっと読む)
ハイブリッド自動車
【課題】バッテリの残容量SOCを適切な状態に管理してハイブリッド自動車の走行性能を十分に発揮する。
【解決手段】モータからの動力だけで走行するモータ走行モードと、エンジンからの動力を使用して走行する他の走行モードとを選択する際に用いるモータ走行モード判定用マップにおけるモータ走行モードの範囲をモータに電力供給するバッテリの残容量SOCが適正値となるように更新可能とする。これにより、バッテリの残容量SOCをより適切な状態に維持でき、ハイブリッド自動車の走行性能を十分に発揮することができる。
(もっと読む)
エンジンの停止時騒音防止装置
【課題】始動用モータの回転駆動力をチェーンを介してエンジンに伝動させる構成において、エンジンの停止直前に、チェーンテンショナーから騒音が発生することを防止する。
【解決手段】エンジン回転数Nen(rpm)が、エンジンの停止要求に基づいてNen0からNen1まで低下する間で、始動用モータのトルク指令値を0から目標トルク値Tmbstopにまで変化させ、その後、Nen2になるまで目標トルク値Tmbstopに維持させ、Nen2から停止するまでの間で目標トルク値Tmbstopから0に戻す。そして、前記トルク指令値に応じて、始動用モータのトルクをエンジンの回転方向とは逆方向に作用させることで、エンジン停止直前における回転変動を抑制し、以って、チェーンの張力変化を抑止する。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】 目的地までの経路の道路状況に応じて燃料消費量が最少となるエンジンとモーターの運転スケジュールを設定する。
【解決手段】 発進と停止が予測される地点で目的地までの経路を複数の区間に区分し、目的地までの経路の道路状況と運転者の運転履歴とに基づいて各区間ごとに車速パターンを推定し、車速パターンとエンジンの燃料消費特性とに基づいて、目的地までの燃料消費量が最少となるように各区間ごとのエンジンとモーターの運転スケジュールを設定するようにした。これにより、定常走行時のみならず、車両の減速および制動時のエネルギー回収による燃費改善と、加速時の燃費増加とを考慮して、目的地までの経路の道路状況と運転者の運転履歴に応じた正確な燃料消費量を求めることができ、燃料消費量が最少となるエンジンとモーターの運転スケジュールを設定することができる。
(もっと読む)
1,861 - 1,876 / 1,876
[ Back to top ]