
Fターム[5H115SJ12]の内容
車両の電気的な推進・制動 (204,712) | 設定手段 (480) | 車両の内部に設定手段があるもの (322) | 加速指令のためのもの (48)
Fターム[5H115SJ12]に分類される特許
1 - 20 / 48
運転支援装置
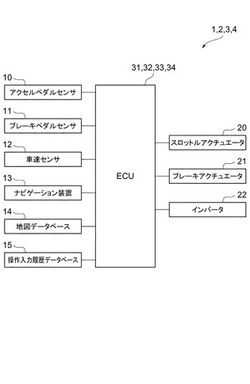
【課題】目標走行パターンを用いた運転支援において運転者の受ける違和感を抑制する運転支援装置を提供することを課題とする。
【解決手段】走行予定経路の先読み情報に基づいて走行予定経路における目標走行パターンを設定し、当該目標走行パターンに追従するように運転支援を行う運転支援装置1であって、運転者の運転操作の履歴に基づいて運転支援を行うことを特徴とし、運転者の運転操作の履歴に基づいて運転支援制御のON/OFFを切り替えたり、あるいは、運転者の運転操作の履歴に基づいて目標走行パターンを設定する。
(もっと読む)
主幹制御装置

【課題】故障を検知して安全運行を継続できる主幹制御装置を提供する。
【解決手段】複数系統の制御部12a、12bを備えた主幹制御装置であって、複数系統の制御部の各々は、主ハンドル1の回転角を検出するロータリエンコーダ4からの信号と、逆転ハンドル5のセンサ8からの信号とを演算する演算部33aと、主ハンドルの回転角を検出するロータリエンコーダからの信号と、逆転ハンドルのセンサからの信号とに基づき故障診断を行う診断部34aと、演算部の演算結果と診断部の診断結果とが一致するかどうかを判定する励振判定部35aとを備え、励振判定部において一致しないことが判定された場合に、自系統の制御部の故障と判断して出力を遮断するとともに、他の系統の制御部による制御に切り換える。
(もっと読む)
列車制御装置及び列車制御方法
【課題】繰り返し列車速度の加速や減速を行うことを防いで、列車の乗り心地を改善して安全性が向上する列車制御装置及び列車制御方法を提供する。
【解決手段】列車自動運転装置4は、ATC車上装置3が備える受信手段で、在線する閉塞区間の信号現示速度よりも次の閉塞区間の信号現示速度の方が小さいときに得られる前方予告検知信号が受信され、且つ先行列車の進行により在線する閉塞区間の信号現示速度が大きくなったとき、ATC車上装置3からの信号現示速度を超えない範囲において、速度検知手段6より得られる列車速度を維持するように、駆動/制動装置8の定速制御を行う。
(もっと読む)
運転支援システムおよび運転支援方法
【課題】定速運転時の乗り心地を改善させる。
【解決手段】車両速度9Dが所定の値に達すると定速運転指令8Dを出力する高速運転支援装置11と、一または複数の車両に搭載され、定速運転指令8Dに基づいて各車両の電動機10のトルクを制御する車両制御装置9と、高速運転支援装置11から送信された定速運転指令8Dを受信する列車情報管理装置8とを備え、列車情報管理装置8は、各車両制御装置9に一括して定速運転指令8Dを送信する。
(もっと読む)
編成車両制御装置
【課題】マスコンを操作するだけで最適速度での運転操作が容易に行え、駅ホームでの定位置停止を容易に行える編成車両制御装置を提供することである。
【解決手段】複数台の車両が連結された編成車両の速度指令を出力するマスコン13と、マスコン13からの速度指令値と編成車両の実速度との速度差の大きさに応じた加減速度を演算する加減速度演算手段18と、編成車両の荷重と加減速度演算手段18で演算された加減速度とに基づいてトルク指令を出力するトルク指令演算手段19と、トルク指令演算手段19で演算されたトルク指令に基づきブレーキ力を発生するブレーキ制御装置16と、トルク指令演算手段19で演算されたトルク指令に基づきけん引力を発生する主電動機制御装置17とを備え、電気車の速度が指令速度に到達したところで定速運転を行う。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者の体重移動に応じて移動する移動体であって、搭乗者の大腿部の下方が空間となる座面を有する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席8の座面8aに加わる力に応じた計測値を出力する力センサ9と、力センサ9からの出力に応じて、車輪6を駆動するための指令値を算出する制御計算部51と、を備えたものである。
(もっと読む)
移動体、及びその制御方法
【課題】高い操作性を有する移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる移動体1は、搭乗者が搭乗する搭乗席8と、搭乗席8を支持する車台13と、車台13を移動させる車輪6と、搭乗席の座面に加わる力に応じて、ヨー軸周りのモーメント、ピッチ軸周りのモーメント、及びロール軸周りのモーメントに対応する計測信号を出力するセンサと、ピッチ軸周りのモーメントに基づいて、並進成分を算出する並進成分算出部55と、ロール軸周りのモーメントに基づいて、旋回成分を算出する旋回成分算出部54と、ヨー軸周りのモーメントに基づいて、その場旋回成分を算出するその場旋回成分算出部56と、並進成分と旋回成分とその場旋回成分とを合成して、移動機構を駆動するための指令値を算出する合成部57、を備えるものである。
(もっと読む)
車載用装置
【課題】予定外の移動や、身近な場所への短距離移動等が発生した場合に、最適な充電量及び充電時間を算出することが可能な電気自動車用の車載用装置を提供する。
【解決手段】本発明の車載用装置は、経路探索を行う経路探索部と、経路探索部により探索された経路を走行するために車載用バッテリに充電すべき充電量を算出する充電管理部とを備えている。充電管理部は、算出した充電量を車載用バッテリに充電するために必要な充電時間を算出し、算出した充電時間を画像又は音声等により通知する。また走行中に、充電時間の算出又は補正に用いた各種情報、例えば搭乗人数やエアコンの使用/未使用等に変更が加えられたか否かを監視し、変更が検知された場合に警告を示す画像を表示部に表示する。これにより、充電量不足により走行不可となる可能性があることを、ユーザに対して通知する。
(もっと読む)
列車制御装置
【課題】列車の走行中、車輪の空転や滑走を未然に防止し、再粘着制御を不要にすることを課題とする。
【解決手段】列車制御装置は、路線条件データ及び車両条件データと速度・位置信号に基づき加減速度指令算出する手段と、車輪の空転・滑走を検知する手段と、路線条件データと空転・滑走検知信号と速度・位置信号とから空転・滑走の起こり易さを区間ごとに判定する手段とを備える。駆動/制動制御装置への加減速度指令値は、空転・滑走区間判定手段により判定された空転・滑走の起こり易さに応じて弱め方向に修正される。
(もっと読む)
走行制御装置
【課題】エンジン及びモータを駆動源とする車両において、システム全体として低燃費化を図ることができる走行制御装置を提供する。
【解決手段】エンジン42及びモータ43を駆動源とする車両であって、所定地点までの行程を複数の区間に設定して各区間での速度パターンを生成する目標速度パターン生成部10と、速度パターンに基づいて加速する加速区間において、加速する際の速度が第1速度以下の速度域である場合には、エンジンの熱効率を優先した加速度パターンを生成し、加速する際の速度が第1速度より大きく第1速度よりも大きい第2速度以下の速度域である場合には、モータのエネルギー変換における損失を最小化することを優先した加速度パターンを生成する目標速度パターン再生成部11と、を備えることにより、モータ43の変換ロスを考慮した低燃費走行が可能となる。
(もっと読む)
車上装置及び車両制御装置
【課題】車軸1回転当たりのパルス数の少ない車軸回転検出器を用いた場合にも、車両速度制御を高精度化しえる車上装置及び車両制御装置を提供すること。
【解決手段】車軸回転検出器31は、車両1の車輪11の回転に応じた周期性を持つ電圧信号S0を発生する。車上信号処理装置3は、車軸回転検出器31から供給された電圧信号S0の周期を、それよりも充分に短い周期を持つ基準パルス信号S2を、カウンタ部33で測定し、速度信号S3を発生する。信号処理部34は、速度信号S3から車両速度を算出する。
(もっと読む)
車両用運転支援装置及び車両用運転支援方法
【課題】運転者の意思を尊重しつつ、適切に自車両前方の障害物の回避効果を向上させる。
【解決手段】前方の障害物SBを回避する必要がある状態で運転者による制動操作を検出すると、障害物回避のためのヨーモーメントを発生させる。ヨーモーメントの発生は、例えば各輪の制駆動力の配分を調整することで実施する。
(もっと読む)
鞍乗型車両の制御装置、及び鞍乗型車両
【課題】車両の発進時や走行中の再加速時に搭乗者が感じる加速感に対する走行環境の影響を低減できる鞍乗型車両の制御装置を提供する。
【解決手段】自動二輪車は、エンジンの駆動力によって後輪を駆動させる後輪駆動装置と、前輪を駆動させるモータと、モータを制御する制御装置12とを備える。制御装置は、モータが出力する駆動力であるモータ駆動力と、当該モータ駆動力によって生じる車両の速度変化とに基づいて、前記モータを制御する。
(もっと読む)
車両
【課題】路面勾(こう)配を推定するとともに、推定値をその時間変化率に基づいて予測した未来の時刻における値に補正することによって、路面勾配が急激に変化しても、車体の姿勢や車両の走行状態を安定に保つことができ、より安全に、かつ、より快適に走行することができるようにする。
【解決手段】車体と、前記車体に回転可能に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、前記車体の姿勢に基づき、路面勾配を推定するとともに、該路面勾配の推定値を、該推定値の時間変化率に基づいて補正する。
(もっと読む)
車輌制御装置
【課題】倒立制御車輌において常に同じ制動、発進、加減速タイミング、或いは制動、発進、加減速フィーリングでの車輌操作を可能とする車輌制御装置を提供する。
【解決手段】本発明は、倒立制御車輌の車体傾斜角の角速度の制御を行う車輌制御装置であって、目標姿勢角を算出する目標姿勢角算出手段(ステップS305)と、目標姿勢角に応じた標準移動時間tCを算出する標準移動時間算出手段(ステップS306)と、目標姿勢角と現在の姿勢角との角度差ΔθCを算出する角度差算出手段(ステップS307)と、車体傾斜角速度[θ1*]を [θ1*]=ΔθC/tCによって算出する車体傾斜角速度算出手段(ステップS308)と、を有することを特徴とする。
(もっと読む)
倒立車輪型移動体、及びその制御方法
【課題】安全性を向上することができる倒立車両型移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる倒立車輪型移動体は、右駆動輪18、左駆動輪20を回転駆動するモータ34、36と、スイングアーム17、19を介してマウント26、28に対して回動可能に支持された搭乗席74と、搭乗席74を駆動するスライド機構68と、を備えている。制御部80は、モータ34.36又はスライド機構68の駆動力に基づいて、車体部77の重量を検知する。そして、車体部の重量がしきい値を越えた時、又はスライド機構68の駆動範囲の端に到達した時に、車体部を低くする。スライド機構の駆動力がしきい値を越えておらず、かつスライド機構68がスライドエンドに到達していない時に、倒立させつつ移動するように制御する。
(もっと読む)
車両およびその制御方法
【課題】アクセル操作量に応じて駆動力の出力特性を変化させることができる車両において、駆動力の出力特性を違和感の無いより適正なものとする。
【解決手段】ハイブリッド自動車20では、キックダウンスイッチ88のオフ時に、通常時実行開度設定用マップを用いてアクセル開度Accに応じて漸次増減するように実行用アクセル開度Acc*が設定される(ステップS120)。また、アクセル開度Accが実用上の最大値100%以上になってキックダウンスイッチ88がオンすると、通常時実行開度設定用マップに比べて同一のアクセル開度Accに対する実行用アクセル開度Acc*をより大きく規定するキックダウン時実行開度設定用マップと運転者によるアクセル開度Accとを用いて実行用アクセル開度Acc*が設定される(ステップS130)。
(もっと読む)
電動車両
【課題】本発明は、駆動源として軽い電動機を採用し、回生エネルギーを効率的に利用する電動車両を提供する。
【解決手段】電動車両11は、左の車輪23、右の車輪24がそれぞれのハブ86に支持され、これらのハブにそれぞれの電動機(インホイールモータ)15、16の駆動力が伝えられて走行する。ハブと電動機15、16との間に介在させている外駆動力調節装置34、36と、外駆動力調節装置に対向させて電動機に接続している内駆動力調節装置33、35と、内駆動力調節装置同士33、35を接続している駆動軸28と、を備えている。内駆動力調節装置同士33、35のクラッチを作動させることで、右の車輪24と左のインホイールモータ15を接続できる。
(もっと読む)
インホイールモータ駆動装置
【課題】 減速機部でのバックラッシュに伴う金属部品間に生じる過大な作用力を防ぎ、減速機部品の耐久性を向上させると共に、乗り心地を改善できるインホイールモータ駆動装置を提供する。
【解決手段】 モータBの出力軸と車両の車輪のハブとを減速機を介して連結し、上記ハブを支持する車輪用軸受を設けたインホイールモータ駆動装置とする。アクセル信号等による外部モータ指令値に応じてモータBの駆動を制御するコントローラ51を設ける。このコントローラ51に、モータBの駆動力の微分量を設定値以下に制御する駆動力変化制限手段56を設ける。コントローラ51は、モータ駆動力指令値rに応じてモータBに流す電流を生成するモータ駆動用コントローラ回路55を有する。上記駆動力変化制限手段56として、例えばローパスフィルタが用いられる。
(もっと読む)
ハイブリッド車両
【課題】ハイブリッド車両において、運転者による操作と車両の走行環境に基づいて運転モードの切り替えを行うことで運転者の加速意図に応じた加速性能を実現する。
【解決手段】運転者による運転操作と走行路の走行環境に基づいて、車両の走行状態を判断し、スポーツ走行状態である場合にはエンジン始動線を通常走行状態に係る原位置からEV走行モード領域側に変更してHEV走行モード領域を拡大する。
(もっと読む)
1 - 20 / 48
[ Back to top ]