
Fターム[5H115TO21]の内容
車両の電気的な推進・制動 (204,712) | その他の検出 (15,876) | アクセル操作量 (2,927)
Fターム[5H115TO21]の下位に属するFターム
アクセル操作の変化量 (487)
Fターム[5H115TO21]に分類される特許
2,421 - 2,440 / 2,440
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法

【課題】 エネルギ効率や動力性能の向上を図る。
【解決手段】 遊星歯車機構のサンギヤ,キャリア,リングギヤにそれぞれモータMG1の回転軸,エンジンの出力軸,駆動軸としてのリングギヤ軸32aが接続されると共に変速機60を介してリングギヤ軸32aにモータMG2の回転軸48が接続されたハイブリッド自動車において、モータMG2やその駆動用のインバータに異常が生じた時や高速巡航運転時には、エンジン22から遊星歯車機構を介してリングギヤ軸32aに出力される直達駆動力だけで走行する直行走行モードを設定し、ブレーキB1およびブレーキB2を共にオフとしてモータMG2の回転軸48をリングギヤ軸32aから切り離す。これにより、直行走行モード時にモータMG2が連れ回されることがないから走行抵抗を小さくできる。この結果、エネルギ効率や動力性能を向上させることができる。
(もっと読む)
ハイブリッド車両のエンジン始動時制御方法

【課題】EV走行中のエンジン始動時の加速ショックを低減する。
【解決手段】EV走行中ならば(ステップS10肯定)、実燃料噴射量Qfin、アクセル開度、車速等の走行情報を読み込み(S20)、仮想エンジン回転数NE0を算出し(S30)、当該回転数NE0とアクセル開度に基づいてガバナ特性マップから仮想燃料噴射量Qfin0を算出する(S40)。トルク換算マップを用い目標エンジントルクTEPnと実エンジントルクTETnを算出し、差分トルクΔTEnを算出する(S50)。エンジン始動指令時ならば(S60肯定)、始動直前のトルクTEP(n−1),TET(
n−1)から算出した差分トルクΔTE(n−1)を、始動時の差分トルクΔTEnとして
保持し(S70)、トルクアシスト量Tmgとする(S80)。エンジン始動時でないならば(S60否定)、現在の差分トルクΔTEnをそのままトルクアシスト量Tmgとする(S90、S80)。
(もっと読む)
ハイブリット車両の駆動力制御装置
【課題】加速中に急激なエンジン出力の変化の少ないハイブリット車両を提供する。
【解決手段】エンジン1と、電力を蓄える蓄電装置6と、少なくとも蓄電装置6と電気的に接続し、車両に駆動力を与える駆動モータ3を備えたハイブリット車両において、蓄電装置6の蓄電状態を検出する蓄電装置コントローラ10を備え、ハイブリット車両の加速時であり、蓄電装置6とエンジン1からの出力によって車両を駆動させる場合に、蓄電装置6から供給する電力とその時間を推定する。そして、蓄電装置6からの電力供給中に蓄電装置6からの電力が急激に変化しないように、蓄電装置6からの出力とエンジン1からの出力を制御する。
(もっと読む)
動力出力装置およびこれを搭載する自動車,駆動装置,動力出力装置の制御方法
【課題】 二次電池などの蓄電装置に蓄電装置に入力制限が課されているときに駆動軸と電動機とに介在する変速機の変速をスムースに行なうと共に変速機の変速時に電動機が予期しない高回転で回転するなどの不都合を抑制する。
【解決手段】 駆動軸とモータとに介在する変速機のギヤの状態を切り替えている最中に駆動軸に要求される要求トルクTr*を増加する際、モータのトルク指令Tm2*がバッテリの入力制限Winも基づいて設定されたトルク制限Tminに閾値Trefを加えた値より小さいときには(S120〜S140)、通常時の値T1より小さな値T2を設定したレートΔTを前回の要求トルクTr*に加えて今回の要求トルクTr*を設定し(S160,S170)、この要求トルクTr*を用いてエンジンの運転ポイントやモータのトルク指令Tm1*,Tm2*を設定する(S240〜S290)。
(もっと読む)
シミュレータ装置、シミュレーション方法およびプログラム
【課題】処理負荷を大幅に低減し、破綻することがないこと。
【解決手段】電気的特性部と機械的特性部を有するモデルを用いてシミュレーションするシミュレータ装置20であって、統合電気シミュレーション部205は、複数のモデルの電気的特性部を統合し、統合した電気的特性部をシミュレーションし、機械シミュレーション部2061は、統合電気シミュレーション部205によってシミュレーションされた電気的特性部に対応する複数のモデルの機械的特性部をシミュレーションする。
(もっと読む)
動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法
【課題】 エンジンから動力分配統合機構を介して駆動軸に直接出力される動力だけで走行する直行走行モード時におけるバッテリの過充電を抑制して走行不能状態となるのを抑制する。
【解決手段】 モータMG2やインバータ42に異常が生じて直行走行モードが設定されたときには、アクセルペダル83がオンされたときにエンジン22の回転数を目標回転数Ne*に保持してモータMG1から発電トルクを出力することによりリングギヤ軸32aに駆動力が出力されるようエンジン22とモータMG1とを駆動制御し、モータMG1の発電電力をモータMG2に代えてエアコンディショナのコンプレッサ90などを含む補機で消費されるよう制御する。これにより、バッテリ50が過充電するのを抑制し、直行走行モードにおける長時間の待避走行を確保することができる。
(もっと読む)
動力出力装置およびその制御方法
【課題】 エンジンとモータを備えた動力出力装置においてエネルギの再循環が生じないようにエンジンの運転ポイントを高回転数・低トルクの側に変更することによりエンジンの効率が低下する場合であっても、装置全体の効率の低下を防止する。
【解決手段】 エンジン150のクランクシャフト156にプラネタリギヤによる動力分配機構を設け、モータMG1とMG2を設けた動力出力装置110において、エネルギの再循環が生じないようエンジン150の運転ポイントを高回転数・低トルクの側に変更した際、スロットルバルブ開度TAを絞らないように制御することで、エンジン150のポンピングロスの増加を抑制し、装置全体の効率の低下を改善する。
(もっと読む)
走行装置
【課題】 平行な二輪で走行する二輪車を折り畳むことで投影床面積を小形体にして格納や保管できることはもとより、折り畳み状態において人を乗せて牽引移動も可能にした走行装置を提供する。
【解決手段】 平行に配置された一対の車輪3L,3Rと、搭乗者が搭乗するステップ台2L,2Rを有する走行装置本体1と、搭乗者が保持するハンドル6と、走行装置本体1の走行時の角速度及び加速度を検出して走行装置本体1の角速度及び走行加速度を制御する姿勢検出センサとを備え、所定の走行状態を維持するための信号を駆動回路に出力し、車輪を駆動する走行装置であって、 ステップ台2L,2Rは走行装置本体から車輪3L,3R側に左右に分割され回動可能に連結され、走行装置本体のロックレバー70を引き上げることで、ステップ台2L,2Rを広げた状態から走行装置本体側との連結部を頂点にしてリンク機構と共に畳まれ、車輪間幅が縮小される折り畳み構造にした。
(もっと読む)
圧縮機制御装置
【課題】 燃料電池を発電させるために大型の圧縮機を車両に搭載しても、車両内での静粛性を得る。
【解決手段】 空気が供給されて発電する燃料電池1と、二次電池5と、燃料電池1及び二次電池5から電力供給を受けて駆動する駆動モータ8を備えた車両に搭載され、当該車両が走行するために要求される燃料電池1の発電電力に応じて燃料電池1に空気を供給する圧縮機4の回転数を制御する。コントローラ2は、圧縮機4の回転数を制御するに際して、モータ回転センサ12の検出値から車速を検出すると共に、二次電池5の充電量を検出し、車速及び充電量に基づいて圧縮機4の回転数の上限を設定し、当該上限を超えないように圧縮機4の回転数を制御する。
(もっと読む)
電気自動車および電気自動車の制御方法
【課題】 電気自動車に搭載されたモータやインバータの温度上昇を抑制し、車両の走行性能を確保する。
【解決手段】 車両の現在位置と地図情報(地域,勾配,道幅など)とに基づいて車両の現在位置から所定距離以内の道路状態がモータの温度が所定温度以上に上昇すると予測される状態であると判定されたときには(例えば、山岳地で急な勾配があり道幅が狭い場合など)、モータの定格最大トルクの範囲内のうち低回転高トルクの領域を制限した範囲内でモータを駆動する(S150〜S170)。これにより、モータを高負荷で運転することによるモータやインバータの温度上昇を抑制することができ、車両の走行性能を確保することができる。
(もっと読む)
電動車両駆動制御装置及び電動車両駆動制御方法
【課題】駆動モータを駆動して、車両要求トルクに対して出力トルクが過不足する分を確実に補い、車両駆動装置に振動が発生するのを抑制する。
【解決手段】発電機目標トルクTG* を算出する発電機目標トルク算出処理手段と、発電機のイナーシャトルクTGIに基づいて、イナーシャ補正トルクを算出するイナーシャ補正トルク算出処理手段と、算出されたイナーシャ補正トルクに基づいて駆動モータ目標トルクを発生させる駆動モータ目標トルク発生処理手段と、イナーシャ補正トルクによる出力トルクの変動を表す出力トルク変動指標に基づいて出力トルクを補正するダンピングトルク補正処理手段とを有する。イナーシャ補正トルクが算出され、出力トルクが補正されるので、車両要求トルクTO* に対して出力トルクが過不足する分を確実に補うことができる。
(もっと読む)
車両の制御装置
【課題】 電磁駆動弁を有するエンジンの作動異常時において車両の退避走行性能が改善される車両の制御装置を提供する。
【解決手段】 電磁駆動弁である吸気弁74或いは排気弁75の動作異常などのエンジン異常が判定された時には、フェイル時駆動制御手段(フェイル時制御手段)138(SB4、SB6、SB7)により、車両の動力源としてエンジン10を用いずモータジェネレータ(電動機)MG1の駆動力を用いてその車両が運転制御されることから、車両の退避走行性能が向上させられる。
(もっと読む)
車両
小型化を図りながら、発電特性およびトルク出力特性を調整することが可能な回転電機を備えた車両を提供する。この車両は、回転軸(11、51、111、161、211、240、290)と、回転軸に取り付けられ、回転軸と共に回転するロータ(22、62、122、172、222、260、310)と、ロータに対して所定の間隔を隔てて対向するように配置されたステータ(21、61、121、171、221、250、300)とを含み、ロータおよびステータが、磁気抵抗となるエアギャップ長を調整することが可能なように構成された回転電機(20、60、120、170、220、230、280)と、回転電機のロータに接続されるエンジン(10、50、110、160、210)とを備えている。 (もっと読む)
ハイブリッド車両
エンジンを停止した状態で走行する第2の走行モードで目的地まで確実に走行することを可能にし、第2の走行モードをより有効に利用することを可能にするハイブリッド車両。この車両において、電動モード走行可能距離計算部(13)は、走行時平均消費電流計算部(12)から入力された走行時平均消費電流値と、バッテリ容量計算部(18)から入力されたバッテリ容量SOCに基づいて走行可能距離を計算して表示部(14)に出力する。燃料走行可能距離計算部(8)は、燃料残量測定部(6)から入力された残燃料と、燃費計算部(7)から入力された燃費に基づいて、残り走行可能距離を計算して表示部(14)に出力する。表示部(14)は、電動モード走行可能距離計算部(13)から入力された走行可能距離と、燃料走行可能距離計算部(8)から入力された残り走行可能距離に基づいて、残燃料、走行分バッテリ容量SOCトータルの残り走行可能距離を表示する。 (もっと読む)
電気機械的トランスミッションのパワーフロー管理のための方法及び装置
車両用途に指定速度比内で動作する電気機械的パワースプリット無限可変トランスミッション(102)のパワー管理方法。トランスミッションは、パワーを受け取るために駆動エンジン(100)の出力シャフトに連結される入力シャフト(103)、駆動シャフト(104)、電気的機械E1,E2、各々が太陽部材S、リング部材R、一組の遊星部材P及び惑星キャリアCを有する一対の遊星トレーンU1,U2、1以上のトルク移送装置Lを含み、トルク伝達のために遊星トレーンU1,U2の部材を連結・切断する。駆動シャフトは車両のファイナルドライブ(106)と連結され、車両駆動ホイール(105)へのパワーの供給・取出を行う。E1,E2はパワー制御ユニット(120)を通して電気相互接続され、遊星トレーンU1,U2の部材と連結される。パワー管理方法は、入力シャフトと駆動シャフトの現在速度、トルク、所望動作パラメータに基づき選択される。
 (もっと読む)
(もっと読む)
分離された機械的制御と電気的制御を有する動力装置の制御方法及び装置
本発明は、車両の動力装置の制御方法に関する。本発明は、動力装置による車両の特定の駆動モードに存する。エンジントルク抽出モードにおいては、本制御方法は、電気エネルギのバッファ要素の充電レベル(Ucapa)の測定値と、上記電気機械(Me111、Me212)の回転数(ωe1、ωe2)及び電気機械から供給されるトルク(Te1、Te2)の測定値のみを利用して、第1段階において、熱エンジンのトルク(Tice#)を計算し、車輪へ加えられるトルクと熱エンジンの回転数を同時に調整しながら、推定された機械的な特徴を表わす機械的な制御信号(u0)を作成し;次いで、第2段階において、機械的な制御信号に基づいて第1及び第2の電気機械のトルク(Te1#、Te2#)を計算し、エネルギレベルを調整するエネルギ的な制御信号を作成する;ことからなる。 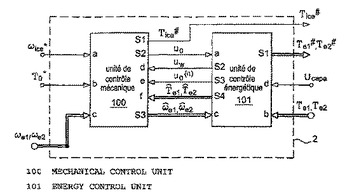 (もっと読む)
(もっと読む)
連続無段変速機を有する動力装置の制御方法及び装置
本発明は、エンジントルク抽出モードで、連続無段変速機を有する動力装置の制御方法及び装置に関する。関係するシステムは、熱エンジンと「エンジントルク抽出モード」で動作する連続無段変速機が装備された車両である。本発明によれば、非線形の多変数の包括的なモデルが、分離装置(35)へ送られる複数の中間の値(V1、V2、V3)の変数が、調整装置(34)によって作られるように、決定装置(36)の中で実行される。使用される測定値の信号は、連続無段変速機の電気変速機の電気機械の回転数及びトルクと、電気変速機のエネルギバッファ要素の端子間の電圧である。発生される制御値は、電気機械と熱エンジンのトルクの指令値の信号である。 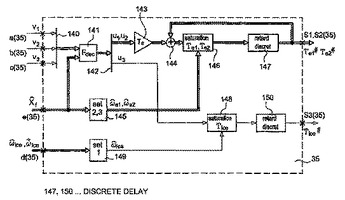 (もっと読む)
(もっと読む)
ハイブリッド自動車
【課題】バッテリの残容量SOCを適切な状態に管理してハイブリッド自動車の走行性能を十分に発揮する。
【解決手段】モータからの動力だけで走行するモータ走行モードと、エンジンからの動力を使用して走行する他の走行モードとを選択する際に用いるモータ走行モード判定用マップにおけるモータ走行モードの範囲をモータに電力供給するバッテリの残容量SOCが適正値となるように更新可能とする。これにより、バッテリの残容量SOCをより適切な状態に維持でき、ハイブリッド自動車の走行性能を十分に発揮することができる。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】 目的地までの経路の道路状況に応じて燃料消費量が最少となるエンジンとモーターの運転スケジュールを設定する。
【解決手段】 発進と停止が予測される地点で目的地までの経路を複数の区間に区分し、目的地までの経路の道路状況と運転者の運転履歴とに基づいて各区間ごとに車速パターンを推定し、車速パターンとエンジンの燃料消費特性とに基づいて、目的地までの燃料消費量が最少となるように各区間ごとのエンジンとモーターの運転スケジュールを設定するようにした。これにより、定常走行時のみならず、車両の減速および制動時のエネルギー回収による燃費改善と、加速時の燃費増加とを考慮して、目的地までの経路の道路状況と運転者の運転履歴に応じた正確な燃料消費量を求めることができ、燃料消費量が最少となるエンジンとモーターの運転スケジュールを設定することができる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】 パラレルハイブリッド車両において、モータMG2の制御に起因する振動を抑制し、乗り心地を向上する。
【解決手段】 エンジン、モータMG1、モータMG2および車軸をプラネタリギヤを介して結合する。エンジンおよびモータMG1から出力された動力をモータMG2で補償して要求動力を車軸から出力する。この制御では、まず上記補償に必要なトルクをモータMG2の仮目標トルクとして設定する。この仮目標トルクになまし処理を施して目標トルクを決定する。車両の走行状態に応じてなまし処理の程度を変える。停車中にエンジンの始動が開始された場合は、高い応答性でモータMG2を制御して車軸へのトルク変動を適切に相殺する。通常走行中にはやや低い応答性でモータMG2を制御して運転者のアクセル操作に対し滑らかに出力トルクを変える。
(もっと読む)
2,421 - 2,440 / 2,440
[ Back to top ]