
Fターム[5H115TU14]の内容
車両の電気的な推進・制動 (204,712) | 監視対象、保護 (4,789) | 移動方向 (39)
Fターム[5H115TU14]に分類される特許
1 - 20 / 39
車両の操舵時挙動改善装置
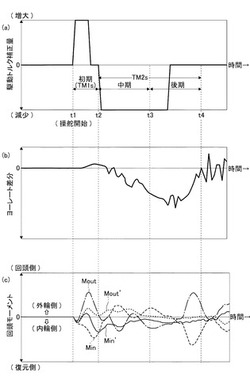
【課題】前輪操舵、前輪電気駆動の車両において、操舵時における初期回頭性の改善を、サスペンション装置の変更ではなく、車輪駆動力の制御により実現する。
【解決手段】車輪駆動用モータの駆動トルクを(a)のように、操舵開始時t1から所定時間TM1sが経過する瞬時t2までの間は、目標モータトルクよりも(a)の実線波形で示す量だけ一時的に増大された値に制御する。(c)のt1〜t2間(初期)において旋回方向外輪の回頭モーメントMoutおよび旋回方向内輪の回頭モーメント(復元モーメント)Minの差による回頭モーメントが大きくなり、これによる見かけ上の横力の増大により、ヨーレートの増加分が(b)に実線で示すごとく瞬時t1〜t2の初期において速やかに立ち上がり、ヨーレートを遅滞なく上昇させ得て、車両の操舵応答(初期回頭性)を大幅に改善することができる。
(もっと読む)
車両

【課題】電磁場の共鳴を利用して、車両外部に設けられた送電コイルから電力を受電可能な受電コイルが底面に配置された車両において、送電コイルに受電コイルを簡単に位置あわせすることができる車両を提供する。
【解決手段】電動車両100は、外部に設けられた送電ユニット220から非接触で電力を受電する車両であって、底面102に配置され、電磁場の共鳴により送電ユニット220から電力を受電可能な受電ユニット110、外部を撮像するカメラ120と、カメラ120が撮像した車両の外部を表示する表示部とを備え、受電ユニット110は、車両の前後方向における底面の中央部から撮像装置が設けられた周面側にずれた位置に配置される。
(もっと読む)
車両の駐車支援装置およびそれを備える車両
【課題】車両の駐車位置の位置ずれを小さく抑えることができる車両の駐車支援装置およびそれを備える車両を提供する。
【解決手段】車両の駐車支援装置は、カメラ120と、カメラ120から得られる画像で車外の送電ユニット220の位置を認識して送電ユニット220に向けて車両100を誘導するための第1の車両誘導部と、送電ユニット220から非接触状態で電力の受電を行なう受電ユニット110と、受電ユニット110の受電した電力に基づいて車両100を誘導するための第2の車両誘導部とを備える。制御部は、第1の車両誘導部が画像では送電ユニット220の位置を検出できなくなってから車両駆動部に所定距離を超えて車両を移動させても受電ユニット110が送電ユニット220から受電する電力が第1の条件を満たさない場合には、車両100の移動を停止させるための処理を行なう。
(もっと読む)
運転支援装置、方法およびプログラム
【課題】車両の後進を防止しながらエネルギー回収率を高める技術の提供。
【解決手段】車両の前方の目標位置および当該目標位置における目標車速を特定し、前記車両の現在車速を取得し、前記現在車速が所定の閾値より大きい場合に前記車両に搭載された発電機を制御して回生ブレーキのみを発生させることにより前記車両を減速させ、前記現在車速が前記所定の閾値以下である場合に前記発電機を制御して回生ブレーキを発生させ、かつ、前記車両に搭載された摩擦制動部を制御して当該回生ブレーキよりも大きい制動力の摩擦ブレーキを発生させることによって前記目標位置における車速が前記目標車速となるように前記車両を減速させる。
(もっと読む)
車両駆動制御装置
【課題】目的地に至る経路を特定するための操作を必要とすることなく、エネルギー消費量の低減を図る。
【解決手段】無線情報に基づいて走行先に渋滞区間が存在することを判定した場合、モータを使用して渋滞区間を走行する場合に渋滞終了地点でバッテリの充電量が予め定められた規格値以上となるように、渋滞開始地点で必要とされる必要バッテリ充電量を特定し(S402)、渋滞開始地点の手前の一部区間を抽出し、当該渋滞開始地点の手前の一部区間について、渋滞開始地点におけるバッテリの充電量が必要バッテリ充電量以上となるように制御指標のスケジュールを規定する(S404)。
(もっと読む)
倒立振子型移動体及びその制御方法
【課題】目標経路上を精度良く走行することができる倒立振子型移動体を提供する。
【解決手段】 この移動体は、車輪と、車輪に支持される車体を備えており、車輪を回転駆動することで車体を倒立状態に維持しながら路面上を走行する。この移動体は、移動体の目標位置を時間の関数で表した目標軌道を用いて、車体が倒立を維持しつつ移動体の進行方向の位置を制御するための第1制御指令値を算出する手段(40,32)と、前記目標軌道と実測又は推定される移動体の進行方向の位置に関する情報とを用いて、移動体の旋回方向の角度を制御するための第2制御指令値を算出する手段(50,34)と、第1制御指令値と第2制御指令値に基づいて車輪を駆動する手段(22,24)と、を備えている。
(もっと読む)
電動車両用電源の電源管理装置
【課題】車両の走行状態に応じて複合電源を効果的に充放電させることができる電動車両用電源の電源管理装置を提供すること。
【解決手段】電源管理装置10は、二次電池12及びキャパシタ13と、二次電池12及びキャパシタ13の充放電を制御する充放電制御装置16と、車両の走行位置及び走行経路を検出するナビゲーション装置17と、検出された走行経路の履歴を記憶する走行経路履歴記憶手段18と、二次電池12及びキャパシタ13の充放電量を算出する充放電量算出手段19と、算出された充放電量の履歴を記憶する充放電量履歴記憶手段20と、二次電池12及びキャパシタ13に蓄電された電力の残容量を算出する残容量算出手段21とを備え、残容量算出手段21は、走行経路の履歴と充放電量の履歴とを重ね合わせることによって走行経路上の各位置における残容量を算出し、充放電制御装置16は、算出された残容量に基づいて充放電を制御する。
(もっと読む)
移動体のレーザービーム給電システム
【課題】
電気で自由に移動可能な自動車等の移動車両に、ドライバーが意識することなく外部から給電可能とするレーザービーム給電システムを提供する。
【解決手段】
レーザービーム給電システムは、移動体と、電力源とからなり、移動体は、レーザービームを受給し電力に変換するレーザービーム受給手段を備え、電力を動力として移動し、電力源は、該移動体の外部にて配置され、移動体にレーザービームを供給するレーザービーム供給手段と、レーザービーム受給手段の相対位置を自動的に調整する自動位置調整手段と、を有し、走行中の移動体に対しレーザービームを給電する。
(もっと読む)
眠気検出装置及びそれを用いた運転制御装置
【課題】運転時の安全性を格段と向上させることができる眠気検出装置及びそれを用いた運転制御装置を提供すること。
【解決手段】車両を運転している運転者の眠気を検出する眠気検出装置であって、運転者が眠気を帯びているか否かを判定する居眠り判定手段は、車両が走行している路面の凹凸状態を検出する路面状態検出手段の検出結果から、上記路面の凹凸状態に応じた上記車両に対する外乱に起因して、当該車両の走行方向が変えられると予測される場合、車両の操舵角を検出する操舵角検出手段及び/又は車両の走行方向を変えるための操舵力を検出する操舵力検出手段の検出結果が、上記車両の走行方向を修正するための操舵角及び/又は操舵力であるとき、上記運転者は覚醒していると判定し、上記車両の走行方向を修正することなく、該走行方向が上記外乱によって変えられたにも拘らず、所定時間、上記走行方向を修正する操舵角及び/又は操舵力が得られないとき、上記運転者は眠気を帯びていると判定するようにした。
(もっと読む)
車両の駆動制御装置
【課題】電動機等の過熱を抑制すると共に、登坂走行性能を向上させることが可能な車両の駆動制御装置を提供することである。
【解決手段】駆動制御装置10は、第1負荷率制限マップ17に基いて負荷率を制限する制限手段21と、ナビゲーションシステム16に基いて、現在地点から目的地点までの残存距離と道路勾配とを取得する取得手段22と、電動モータ11の温度が所定温度に達した場合に、残存距離と道路勾配、及び閾値マップ19に基いて、目的地点に到達する前に電動モータ11の温度が短期保証温度に達するか否かを推定する推定手段23と、短期保証温度に達しないと推定されたときには、制限手段21による負荷率制限を解除して、第2負荷率制限マップ18に基いて負荷率を制限する制限解除手段24と、を有する。さらに、駆動制御装置10は、温度上昇率算出手段25と、閾値変更手段26と、を有する。
(もっと読む)
車体屈曲式産業用車両
【課題】走行用車輪に停止トルクが作用している場合においても、その場旋回を行い得る産業用車両を提供する。
【解決手段】電動機7により回転される左右の車輪3を有する前側車体部2aと、電動機により回転される左右の車輪4を有する後側車体部2bとが屈曲可能に連結されたホイールローダであって、各車輪の回転方向を考慮した回転数を検出し得る回転検出器9にて検出された各車輪の回転数を入力して、各回転数が略ゼロとなるような停止トルクを発生させる停止トルク付与部21と、各回転検出器にて検出された各車輪の回転数の合計値を求める加算部23及びこの合計値を入力して当該値が略ゼロであるか否かにより、その場旋回であるか否かを判断する旋回判断部24を有すると共に、その場旋回であると判断された場合に、現在、付与されている停止トルクを、そのまま維持させる指令を停止トルク付与部に出力し得る停止トルク維持部22とを具備したもの。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】トルクショックにより運転者に違和感を与えることなく、かつ迅速にクリープトルクカット状態からクリープトルクを復帰する。
【解決手段】クリープトルクカット条件の成立が解除されるときにシフトポジションSPがDポジションのときには、ブレーキ変化量ΔBPが閾値ΔBPref未満のときや車速Vが値0以上のとき,シフト変更検出フラグFが値1のときには所定値ΔTc1をレート値ΔTcに設定し(S110〜S140)、ブレーキ変化量ΔBPが閾値ΔBPref以上であって車速Vが負の値でありシフト変更検出フラグFが値0のときには所定値ΔTc1より大きい所定値ΔTc2をレート値ΔTcに設定し(S110〜S130,S150)、設定したレート値ΔTcを用いたレート処理により所定トルクTsetに向かって変化するトルクをクリープトルクTcとして設定してモータ22を制御する(S160〜S200)。
(もっと読む)
電動機の制御回路および電動機の制御回路を備えた移動体
【課題】比較的簡単な構成で、複数の電動機の回転速度を制御することのできる技術を提供する。
【解決手段】
複数の電動機を備えた移動体の制御回路100は、複数の電動機をそれぞれ駆動させる駆動信号をそれぞれ生成する複数の駆動信号生成部120L,120Rと、複数の電動機のうちの1つの電動機の回転速度を検出し、回転速度に応じた周波数を示す回転信号を生成する回転信号生成部32Lと、複数の電動機のうちの1つの電動機に関する目標回転速度を設定し、設定された目標回転速度に応じた周波数を示す基準回転信号を生成する基準回転信号生成部104と、回転信号と基準回転信号との位相差を検出し、位相差を示す位相差信号を生成する位相差信号生成部108と、を備える。複数の駆動信号生成部120L,120Rは、位相差信号に基づいて、駆動信号をそれぞれ生成する。
(もっと読む)
車両
【課題】段差を昇降する前に、車体を段差の下段側に傾けるとともに、能動重量部を段差の上段側に移動させることによって、高い段差も安全に昇降することができ、段差のある場所でも安全かつ快適に走行することができるようにする。
【解決手段】車体と、該車体に回転可能に取り付けられた駆動輪12と、前後方向に移動可能に前記車体に取り付けられた能動重量部と、前記駆動輪12に付与する駆動トルクを制御するとともに、前記能動重量部の位置を制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面の段差を昇降する前に、前記車体を段差の下段側に傾けるとともに、段差の上段側に前記能動重量部を移動させる。
(もっと読む)
車両挙動制御装置及びその方法
【課題】走行中の車両の実際の走行方向と反対の走行方向を示すシフト又はレンジを運転者が選択した場合に、トルクコンバータやクラッチでの差回転の発生を抑制して、運転者の意思に合致した走行制御を行う。
【解決手段】車両挙動制御装置は、走行中の車両の走行方向を検出する走行方向検出部71と、駆動輪の駆動力を制御し、かつ車輪の制動力を制御するECU16とを備える。ECU16は、走行方向検出部71が検出した車両の走行方向とセレクトレバー81のレンジが示す車両の走行方向とが異なる場合、エンジン2から駆動輪への駆動力の伝達を抑制し、かつ車輪の制動力を発生させる。そして、ECU16は、その後、車両の走行方向が反転する際、駆動輪の駆動力を増加させる。
(もっと読む)
複数駆動源の駆動力制御装置
【課題】前後、左右で独立に駆動源が設けられた場合に、乗員による操作や状態が変化した場合に、できるだけそれらに応じた駆動力を出力する。
【解決手段】車両10の左右の前輪12は共通の前モータ14で駆動され、左右の後輪16L及び16Rは個別のモータ18L及び18Rによって駆動される。駆動力制御装置20は、車両の前後方向の駆動力である要求車両駆動トルクTreq0と、車両の旋回方向の駆動力である要求旋回トルクNreq0と、トルクの要求前後配分比K0とに基づいて各モータのトルクを決定する。駆動力制御装置20は、要求車両駆動トルクTreq0と、車両の旋回方向の駆動力である要求旋回トルクNreq0を同時に満足できるかを判定し、同時に満足できない場合には、乗員による操作あるいは車両の状態に応じて、3つの要求値のうち優先させるべき要求値を選択して、該選択に応じた調整を行う。
(もっと読む)
バッテリ容量決定支援システムおよびバッテリ容量決定支援方法
【課題】バッテリ容量を増減可能な車両において、バッテリ容量の決定を支援することができるバッテリ容量決定支援システムを提供する。
【解決手段】外部充電可能なバッテリを搭載する電気自動車のバッテリ容量の決定を支援するバッテリ容量決定支援システムは、電気自動車の車両諸元を入力する諸元入力手段(S101)と、基点となる地点を入力する基点入力手段(S104)と、目的地を入力する目的地入力手段(S105)と、基点と目的地との間の経路の情報を入力する経路情報入力手段(S106)と、車両諸元と経路情報とに基づいて、バッテリ容量を算出する容量算出手段(S107)と、容量算出手段によって決定されたバッテリ容量を報知する報知手段(S108)とを備える。
(もっと読む)
ハイブリッド車両における駆動力伝達装置の制御方法
【課題】車両の逆走時に、2方向クラッチが急激に係合してショックの発生が発生するのを防止することができるハイブリッド車両における駆動力伝達装置の制御方法を提供する。
【解決手段】エンジンを駆動源とする前輪と、減速機付き電動モータを駆動源とする後輪を備え、電動モータの出力軸18から後輪に至るトルク伝達経路に機械式の2方向クラッチ19を組込んでエンジンによる車両の走行時に後輪から出力軸18に回転トルクが伝達されるのを防止する駆動力伝達装置において、エンジンおよび電動モータの駆動による登坂路での走行時、車両を一旦停止し、再度同方向に走行する時、自重によって車両が逆走する場合に、その逆走方向とは反対方向に電動モータを駆動させ、2方向クラッチ19のスプラグ24の係合解除トルク以上の負荷トルクを2方向クラッチ19の外輪22に負荷する。
(もっと読む)
自動走行装置
【課題】障害物を回避することが可能な自動走行装置であって、操作者の意思に近い動作をすることができる自動走行装置を提供することである。
【解決手段】駆動源と該駆動源により駆動される駆動輪とを有し、該駆動輪の駆動によって走行体を自動的に走行させるとともに、前記走行体に回転可能に固定された自動走行装置において、前記駆動源として用いたモータの負荷が所定値以上で、かつ前記走行体に対する回転角度が所定値以上のときに前記駆動輪を正回転から逆回転に切り替えることによって、前記走行体を前進から後退に走行方向の切換を行う。
(もっと読む)
車両の駆動力配分制御装置
【課題】車両状態や路面状態に基づいて、車両で実現可能な最大ヨーモーメントを実現する。
【解決手段】本発明は、前輪及び後輪のうち、少なくとも一方の左右輪を独立して制動及び駆動可能に設けられるモータを備える車両の駆動力配分制御装置において、車両のヨーモーメントが最大となる各輪の駆動力配分を演算し(S100〜S800)、演算された駆動力配分となるように各輪の駆動力配分を制御する(S900)。
(もっと読む)
1 - 20 / 39
[ Back to top ]