
Fターム[5H180BB20]の内容
交通制御システム (133,182) | システム、装置の構成 (16,212) | AI、エキスパートシステムを利用するもの (30)
Fターム[5H180BB20]に分類される特許
1 - 20 / 30
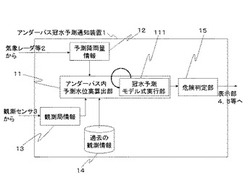
アンダーパス冠水予測通知装置
【課題】
従来の水位センサを用いた方法では、現状の水位情報を示すのみであり、数時間後の危険予測を行うものではないので、危険察知が間に合わない場合があった。
【解決手段】
本発明では気象レーダから得られる予測降雨量情報と、アンダーパスの近くに設置される観測センサから得られる観測局の水量情報と、これらの過去情報とを推移予測モデルに代入し前記アンダーパス内予測水位高を算出する。
さらに、前記アンダーパス内予測水位高を算出するための水位予測モデルを繰り返し計算することにより数時間後の未来のアンダーパス内の予測水位高を算出し、警報情報を発信するアンダーパス冠水予測通知装置。
(もっと読む)
オンラインリスク認識システム

【課題】実際の環境下での経験を自律的に学習して危険度を認識する際、多様な外界環境に対するロバスト性を向上する。
【解決手段】1次元上ループ上のSOMを走行状態に応じて複数のモデルに分割したモデル群を昼夜の別等に応じて並列化しておく。そして、認識モデル設定部5aで選択したモデル群の中から車速や舵角等の情報によって使用するモデルを選択することで、入力データの希薄な部分に対してユニットが配置されることを回避する。次に、認識学習部5bでSOMモデルに特徴量抽出部4で抽出した画像特徴量のみを入力して状態の認識及び学習を行うことで、性質の異なるデータ入力に対するロバスト性を向上する。更に、リスク認識部7で状態と教師との相関関係を求め、状態のリスクを学習・認識する。これにより、リスク認識の際の多様な外界環境に対するロバスト性を向上することができる。
(もっと読む)
リスク予測システム
【課題】現在のリスクだけでなく近い未来のリスクを認識し、ドライバへの警告や車両制御によるリスク回避を可能とする。
【解決手段】特徴量抽出部4で画像入力部2からの画像データから特徴量を抽出し、状態認識部5でN次元の特徴量ベクトルを1次元の状態に変換する。また、リスク情報抽出部6で車両データ入力部3から入力される車両情報からリスク情報を抽出して教師情報を作成する。リスク認識部7は、状態認識部5で得られた状態とリスク情報抽出部6で作成された教師との相関関係から状態のリスクを学習・認識する。更に、リスク予測部8は、時系列的な状態の遷移をマルコフモデルを用いてモデル化し、状態遷移確率をオンラインで学習更新することにより未来の状態を予測して対応するリスクを予測する。そして、リスク情報出力部9から現在のリスクと予測した未来のリスクをモニタや音声等により出力する。
(もっと読む)
リスク認識システム
【課題】ドライバの主観的要因を排除したリスクルールにより、システムが認識するリスクを真の意味での外部環境のリスクに精度良く一致させる。
【解決手段】走行中の自車位置情報から走行環境に応じた基本リスクを設定し、ドライバの特定操作が基本リスクに基づくルール条件に一致するか否かを第1ルール判定部4で反すると共に、第2ルール判定部4bでドライバの運転操作が、ヒヤリハット運転行動と外部環境リスクとの相関を表現したルール条件に合致するか否かを判定する。そして、ドライバの特定運転操作がルール条件に合致した場合に教師情報を生成し、この教師情報を用いて外部環境のリスク認識を行う。これにより、ドライバの主観的要因を排除し、システムが認識するリスクを真の意味での外部環境のリスクに精度良く一致させることが可能となる。
(もっと読む)
車両動作推定装置、車両動作推定方法および車両動作推定プログラム
【課題】道路を走行する車両が存在しない場合であっても車両の動作に対応した情報を取得すること。
【解決手段】車両が走行した道路上での前記車両の動作に対応する動作情報を時刻情報とともに取得し、常時交通情報を提供する交通情報提供装置から前記時刻情報により特定される基準時刻における前記道路についての前記交通情報である基準交通情報を取得し、前記動作情報と前記基準交通情報との相関関係を特定し、処理対象となる推定時刻における前記動作情報が取得されない場合、前記交通情報提供装置から推定元の前記交通情報として提供される前記推定時刻における推定元交通情報と前記相関関係とに基づいて、前記推定時刻における前記車両の前記道路上での推定動作を示す推定動作情報を取得する。
(もっと読む)
位置範囲設定装置、移動物体搭載装置の制御方法および制御装置、ならびに車両用空調装置の制御方法および制御装置
【課題】特定状況に対応する移動物体の位置情報の範囲を正確に画定することが可能な位置範囲設定装置、及びその特定状況に応じて自動的に移動物体搭載装置を制御する制御方法および制御装置、ならびに車両用空調装置の制御方法および制御装置を提供する。
【解決手段】位置範囲設定装置は、移動物体の位置を表す位置情報を取得する位置情報取得部56と、道路の特定区間を表す道路区間情報を取得する道路情報取得部56と、位置情報を対応する道路区間情報に関連付ける区間決定部56と、複数の位置情報及び道路区間情報をそれぞれ学習データとして記憶する記憶部61と、学習データに含まれる複数の道路区間情報を、少なくとも第1のクラスタと第2のクラスタにクラスタリングするクラスタリング部662と、第1及び第2のクラスタに含まれる道路区間情報から移動物体の位置に関する第1及び第2の範囲をそれぞれする位置範囲設定部663とを有する。
(もっと読む)
安全運転支援システム
【課題】ドライバの運転操作と外部環境との関連性を随時学習し、ドライバの普段の内部状態からの逸脱を認識して安全な運転を支援する。
【解決手段】車外環境認識部2で認識した走行環境のリスクと、操作特徴量量子化部3で量子化した運転操作データの特徴量との対応関係をモデル学習部4で学習し、モデルパラメータを取得する。状態推定部5は、学習済みのモデルパラメータを用いて操作特徴量と走行環境リスクレベルとの関連性からドライバの内部状態を推定する。そして、警報・支援部6で、ドライバの内部状態と走行環境リスクレベルとを比較し、車両が本質的に安全か危険な状態にあるかを評価して警報や操作支援等を行う。
(もっと読む)
旅行時間推計方法,旅行時間推計装置,その方法を実装した旅行時間推計プログラム及びそのプログラムを格納した記録媒体、旅行時間予測方法,旅行時間予測装置,その方法を実装した旅行時間予測プログラム及びそのプログラムを格納した記録媒体
【課題】道路リンクの旅行時間を精度良く推計する。道路の将来の旅行時間を当該道路の渋滞情報から予測する。
【解決手段】算出された過去のリンク渋滞度J(l1)と正規化リンク旅行時間NT(l1)(221,222)との関係を用いて、正規化リンク旅行時間を算出する第1変換式の係数を算出する(223)。第1変換式の各係数を変数とし、重回帰分析及び数量化理論I類分析の混合モデルによって回帰式を求める(224)。算出された旅行時間推計対象の渋滞度J(l2)(226)を前記回帰式に適用し、第2変換式の係数を算出する(225)。前記算出された係数を第2変換式に適用し、旅行時間推計対象の正規化リンク旅行時間NT(l2)の推定値を算出する(227)。正規化リンク旅行時間NT(l2)に基づき、当該道路リンク旅行時間の推定値を算出する(228)。上述の旅行時間推計方法を用いて、道路リンク旅行時間の予測値を算出する。
(もっと読む)
渋滞旅行時間予測データベース作成装置,渋滞旅行時間予測データベース作成方法,その方法を実装した渋滞旅行時間予測データベース作成プログラム及びそのプログラムを記録した記録媒体、渋滞旅行時間予測装置,渋滞旅行時間予測方法,その方法を実装した渋滞旅行時間予測プログラム及びそのプログラムを記録した記録媒体
【課題】日種情報を加味した精度の高い予測交通情報を作成し、前記作成された予測交通情報を使って交通情報を高速に予測する。
【解決手段】収集蓄積された渋滞情報及び旅行時間情報を含む交通情報を格納する(111)。前記交通情報を収集した日付ごとに、当該日付の曜日,平日もしくは休日,季節を示す基本日種情報、特異な交通状況の発生期間、のいずれかに応じて一意に定まる日種識別子を定義するセクションと、特定の年月日に前記日種識別子を対応づけた情報から成るセクションと、を有する日種識別子カレンダー情報を格納する(101)。前記格納された交通情報の分析結果に基づいて前記日種識別子カレンダー情報に含まれる日種識別子に対応する予測交通情報を算出し生成する(102)、前記生成された予測交通情報を前記日種識別子に対応付けて格納する(104)。そして、前記日種識別子に対応付けられた予測交通情報を用いて交通情報を予測する。
(もっと読む)
ナビゲーション装置、及びハイブリッド車両
【課題】走行パターンによる経路案内をしつつも、より効率のよい走行を行う。
【解決手段】ユーザがいつも通る道でいつも行く所に行こうとする場合、ナビゲーション装置は、これを検知し、交通情報を受信して、この経路で渋滞などの円滑な走行を阻害する事象が発生しているか確認する。円滑な走行を阻害する事象が発生している場合、これによって燃費が一定以上悪くなるようであれば、ハイブリッド車両は、目的地までの燃料消費量が最小となる最適経路を探索し、ユーザに提示する。そして、ユーザがこの提示によって最適経路の案内を選択した場合、ハイブリッド車両は、最適経路での走行を案内する。
(もっと読む)
運転支援装置
【課題】運転者の状態を的確に検出し、運転者の状態に応じて好適に運転を支援することができる運転支援装置を提供する。
【解決手段】運転者が漫然状態である旨判定された場合には、報知装置を動作させるか否かの基準となる報知判定閾値tthが通常値よりも小さな値に変更されることにより、報知装置は通常よりも早めに動作するようになる。このため、運転者が運転に注意すべきである旨自覚していながらも意図的に行動している場合において、注意力が低下している場合と同じように警告が行われることはない。したがって、運転者の状態、すなわち運転者が通常状態であるか漫然状態であるかに応じて報知装置による報知を通常のタイミングで出力するか早めに出力するかが決定されることにより、運転者の状態に応じた車両の運転支援が好適に行われる。
(もっと読む)
追従制御装置
【課題】 周辺環境に適した車間距離を確保して走行することを可能にする追従制御装置を提供する。
【解決手段】 追従制御装置1は、車両に搭載されたECU2を備えている。ECU2は、メモリ部13に記憶されたドライバ好み車間距離マップから、ドライバの好みに応じた車間距離を設定する車間距離設定部15と、前方レーダ9及び後方レーダ10の検出信号に基づいて、自車両と周辺車両との車間距離等を求める周辺車両検出部16と、自車両と周辺車両との車間距離等に基づいて、周辺車両の走行状態に応じた車間距離を求める車間距離設定部17と、ドライバの好みに応じた車間距離と周辺車両の走行状態に応じた車間距離とを用いて、自車両と先行車両との目標車間距離を求める目標車間距離設定部18と、目標車間距離に応じて速度を制御する速度制御部20とを有している。
(もっと読む)
推定関数を使用する最適ルート決定
【課題】道路網の出発点から目的地までのルートを決定する方法において、部分的な地図アップデートが容易に実行されることを可能にすること。
【解決手段】道路網の出発点から目的地までのルートを決定する方法およびシステムが提供され、道路網の頂点のための推定関数が使用され、タイリングが道路網の少なくとも一部分が含まれる地域をカバーするように定義され、タイリングの各タイルの抵抗値が提供され、道路網の頂点のための推定関数の値がタイリングのタイルの抵抗値に応じて決定される。好ましい実施形態において、所定のタイル(T0)の抵抗値は、一対の頂点のエアライン距離(12、14)によって分割される所定のタイルの境界に位置する任意の一対の頂点(tbv1〜tbv4)を接続する最適ルート(11、13)に関連するコストの下限または最小値である。
(もっと読む)
車載用割込み情報交換装置、プログラム及び方法
【課題】割込みを許可するか否かの判断を、より多面的な見地から行うことができるようにする。
【解決手段】車載用割込み情報交換装置において、他車に搭載された通信手段との間で通信を行う通信手段と、割込みを希望する旨を示す割込み要求を通信手段により他車に送信する割込み要求送信手段(ステップ32)と、割込み要求送信手段により送信する割込み要求に対し、自車の運転者に関する情報を付加する情報付加手段(ステップ32)と、他車からの前記割込み要求を通信手段により受信する割込み要求受信手段と、割込み要求受信手段により受信した割込み要求に基づき、割込みが希望されている旨及び該割込み要求に含まれる運転者に関する情報の内容を提示する割込み要求提示手段とを設ける。
(もっと読む)
繰り返し移動する機関における移動結果を使用した移動機関予測情報通知システム。
【課題】 移動機関(路線バスや定期配送便等)を利用する場合、事前に(予約時等に)精度の高い予測情報を入手する事ができる移動機関予測情報通知システムを提供する
【解決手段】 予測に使用する移動機関情報を収集する予測情報収集システム2を搭載した路線バス1と、その情報を随時種類別に格納し移動体電話5等の要求に応じて希望する時に統計計算し結果等を通知するサーバーシステム4と、サーバーシステム4へアクセス可能な携帯電話5等の情報端末を備えた構成であって、精度の高い予測情報を簡単かつタイムリーに入手出来るようにしたものである。
(もっと読む)
ナビゲーション装置
【課題】移動物体が選択し得る進路ごとの流れ(例えば、分岐点において右折車線選択して右折し、右折先の車線を進んで行く車両の移動速度)を考慮した適切な移動経路を利用者に提供することを課題とする。
【解決手段】ナビゲーション装置10は、交通情報(例えば、交差点Aにおいて、左折方向に曲がって左折後に進んだ他の車両の数、移動速度、車両間隔など)を用いて、車両1が選択し得る進路ごとに、各進路における車両1の流れ(例えば、分岐点において右折車線選択して右折し、右折先の車線を進んだ場合に予測される移動速度)を予測する。続いて、ナビゲーション装置10は、予測された流れに応じて、移動経路を探索する。すなわち、図1の例では、交差点Aの手前では、直進車線よりも左折車線の流れが遅いが、交差点Aを左折した先は流れが早く、目的地への到着が早い場合には、交差点Aを左折する移動経路を探索する。
(もっと読む)
駐車場において人工知能を利用した自動案内による駐車システムと場内の車の流れと駐車スペースのシミュレーション。
【課題】既存の駐車場において駐車スペースを確保する為の混乱がある。待機中の車のアイドリングによる燃料エネルギーの消費や排気ガス等の公害を発生していた。環境にやさしく各駐車スペースのセンサーやそれに付随する設備を必要としない、誘導員等の人件費の節約効果が生まれる駐車システムを提供する。
【解決手段】車台数の初期条件、収容能力・駐車場出入口のセンサー情報・駐車スペース番号等の境界条件と人工知能ソフトが交わる事により、駐車場所の案内と車の流れの誘導を可能とする。又、曜日や時間帯別の車の流れのシミュレーション結果により、入場カードの発券間隔自動調整ができるので場内の混乱を避けると同時に、場外の入場待ちの車の行列も最小限に抑える事が出来る。
(もっと読む)
物体判別装置、報知制御装置、物体判別方法および物体判別プログラム
【課題】単眼で撮像された画像から効率的に物体を判別することを課題とする。
【解決手段】単眼カメラで撮像された画像に対して顕著性算出手法を適用して判別の対象となる物体(ここでは、歩行者)を検出する(図1の(1)参照)。かかる物体検出によって判別対象となる候補物体が検出されると、検出された物体に対してニューラルネットワーク手法を適用して候補物体が歩行者であるかを判別する(図1の(2)参照)。さらに、上記した物体判別によって得られた判別結果の他に、レーダによって得られた物体に対する距離情報(車両から物体までの距離)を用いて、物体との衝突危険度を判定し、この判定結果に応じて車両制御や報知制御を行う(図1の(3)および(4)参照)。
(もっと読む)
渋滞予測システム及び渋滞要因推定システム、並びに渋滞予測方法及び渋滞要因推定方法
【課題】リンク内の任意の地点における渋滞を予測するとともに、道路の渋滞を高精度に予測することができる渋滞予測システムを提供する。
【解決手段】道路を走行する車両から得られる軌跡情報を用いて当該道路の渋滞を予測するシステム。渋滞を予測したい地点の1又は複数の情報であって、渋滞に影響を及ぼし得る環境情報を入力する入力手段32と、前記渋滞を予測したい地点に対応して予め作成された、前記環境情報と、前記軌跡情報から得られる渋滞の程度との関係を表わす式を用いて、前記入力された環境情報に基づいて当該地点の渋滞を予測する渋滞予測手段38とを備えている。
(もっと読む)
交通信号制御システム、および交通信号制御システムの制御方法
【課題】急激な交通状況の変動にも対応することができる交通信号制御装置を提供する。
【解決手段】重要交差点201aおよび一般交差点203a〜203fを対象とした交通信号制御のネットワークと、重要交差点201bおよび一般交差点203g〜203jを対象とした交通信号制御のネットワークとを接続する。隣接交差点から交通情報と信号制御内容とを受信するのと合わせて、異なるネットワークの境界交差点(交差点203f,203g)間で制約情報(他の重要交差点がとりえるサイクル変動値や、他の重要交差点がとりえるオフセット変動値など)を交換することによって、ネットワーク境界での連携を維持しながらネットワークをまたいだ自立分散制御を実現する。
(もっと読む)
1 - 20 / 30
[ Back to top ]