
Fターム[5H180CC12]の内容
Fターム[5H180CC12]に分類される特許
4,001 - 4,020 / 4,855
ナビゲーション装置
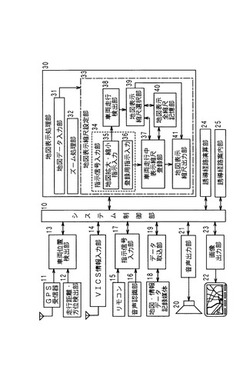
【課題】車両の停止中は地図の縮尺をきめ細かく順に表示し、車両の走行時は運転者が所望の縮尺の地図を容易に、且つ直ちに表示できるナビゲーション装置とする。
【解決手段】地図表示全縮尺記憶部40に記憶されている、車両が停止時に地図表示することができる全縮尺の中から、利用者が車両走行時に表示する地図の縮尺の選択を行い、車両走行中表示縮尺登録部37に登録する。それにより、車両走行検出部38で車両が停止していると判別したときには、地図表示縮尺選択部39が地図表示全縮尺記憶部40を選択し、利用者による地図拡大・縮小指示入力35によって、このナビゲーション装置が表示できる全ての縮尺の地図を表示する。一方、車両走行検出部38で車両が走行していると判別したときには、車両走行中表示縮尺登録部37に登録してある縮尺の地図のみが選択されて順に表示がなされる。
(もっと読む)
車両用進路推定装置

【課題】 自車の操舵角が急に変化するような状況においても、自車前方に存在する物体の高精度な進路推定を行うこと。
【解決手段】 物体の過去位置履歴に基づく進路推定方法、及び物体の相対位置及び自車の運動状態に基づく進路推定方法について、物体の絶対速度の高低に基づいて進路を推定する際に用いるべき方法を決定し、その決定した進路推定方法を用いて物体の相対的な進路を推定する。
(もっと読む)
測位データ処理方法
【課題】 測位センサの一部から測位データが得られなくなっても、複数の測位データの組み合わせ演算で得られる位置データに位置跳びの影響が出ることを回避でき、安定した制御を行うことができる測位データ処理方法を提供する。
【解決手段】 船舶又は浮体の位置制御において、複数の測位センサ1〜Nで検出される複数の測位データXaniに対して、それぞれドリフト補正を行い、該ドリフト補正を行った後のドリフト補正後測位データXcniに対して、それぞれの時系列データのバラツキに応じた加重平均処理を行って、位置制御のための位置データXciを得る。
(もっと読む)
移動管理システム
【課題】 エリア間の特定の方向への移動を自動的に規制することが可能な移動管理システムを提供する。
【解決手段】作業者のエリア間の境界における移動方向を管理する入場衛生管理システムであって、RFIDタグと、出口側受信機と、入口側受信機と、自動ドアと、入場管理装置1とを備えている。RFIDタグは、作業者が携帯し、自身を特定するための特定信号を発信する。出口側受信機は、出口側近傍エリアに存在するRFIDタグからの特定信号を受信し、入口側近傍エリアに存在するRFIDタグからの特定信号を受信しない。また、入口側受信機は、入口側近傍エリアに存在するRFIDタグからの特定信号を受信し、出口側近傍エリアに存在するRFIDタグからの特定信号を受信しない。
(もっと読む)
位置検出装置
【課題】 走行距離センサ等を用いることなく、2次元測位時においても高精度の高度を得ることが可能な位置検出装置を提供する。
【解決手段】 この位置検出装置1は、アンテナ2と、GPS受信処理部3と、計時処理部4と、高度情報格納部5と、演算処理部6とを具備する。高度情報格納部5は、演算処理部6によって作成される高度マップを格納する。演算処理部6は、GPS受信処理部が3次元測位を行っている場合に、一群のエリアの内の現在位置が属するエリアの高度マップを、3次元測位された現在位置の経度、緯度、及び/又は、高度を用いて更新し、GPS受信処理部3が2次元測位を行っている場合に、一群のエリアの内の現在位置が属するエリアの高度マップを用いて高度を算出する。
(もっと読む)
車両周辺物体探知装置
【課題】 車両前方を探知範囲とするレーダ装置を用いて、信号機が設置された位置において近づいてくる物体を検出することができる「車両周辺物体探知装置」を提供すること。
【解決手段】 車両前部に設置されて探知範囲が変更可能なレーダ装置10と、車両前方に設置された信号機を検出するカメラ20、信号機検出部22と、信号機検出部22によって信号機が検出されたときに、レーダ装置10の探知範囲を車両の進行方向に対して横方向に広げる探知範囲変更指示部24と、探知範囲変更指示部24によって探知範囲が横方向に広げられたレーダ装置10によって車両周辺の移動物体が探知されたときに、この探知結果に対する所定の応答処理を行う警報出力部30、画像記録指示部40、シートベルト制御部50とが備わっている。
(もっと読む)
車両の制御装置
【課題】 衝突予知の誤判定に起因した不必要な制御の実行を防止して衝突予知制御を適正に実行できるようにする。
【解決手段】 予知制御手段2は、他車両検出手段9の検出範囲内から検出範囲外に他車両が移動したことが検出された場合に他車両の横移動ベクトルが予め設定された基準値以下の緩移動状態にあるか否かを判別する移動状態判別手段23と、他車両が上記検出範囲内から検出範囲外に移動する前の検出データに基づいて現時点における他車両と自車両との相対位置および相対速度を推定する位置推定手段24とを有し、上記移動状態判別手段23において他車両が緩移動状態にあると判別された場合にのみ、上記位置推定手段により推定された他車両と自車両との相対位置および相対速度に基づいて他車両と自車両とが衝突する状態にあるか否かを判別するように構成された。
(もっと読む)
携帯型警報装置
【課題】 歩行者と自動車等との衝突を有効に回避し得る携帯型警報装置を提供する。
【解決手段】 ランドセル30の本体部32には左監視レーダ14L、右監視レーダ14R、左光学表示器16L、右光学表示器16R、音響装置20が取り付けられている。本体部32の背面左側には左振動装置18Lが、背面右側には右振動装置18Rが取り付けられている。携帯型警報装置の制御部は、監視レーダによって検出された距離に基づいて障害物が近づいているか否かを判断し、検出した相対速度に基づいて障害物が高速で近づいているか否かを判断する。制御部は、障害物が高速で近づいていると判断した場合には、音響装置20から警告音を出力させると共に、障害物が存在する方向に対応した光学表示器や振動装置を作動させる。
(もっと読む)
車両周辺情報提供装置
【課題】センサの故障によるユーザの周辺状況の誤認識を抑制する「車両周辺情報提供装置」を提供する。
【解決手段】警報障害算定部3は、センサの新たな故障が発生したならば、当該センサの故障が影響する警報種別に対して「障害有り」を登録すると共に、当該警報種別の警報について、センサの故障による動作障害が発生することを警告する音声を出力する。警報生成部8は、センサ情報処理部6が出力する各センサ情報に基づいて自車の周辺状況が当該警報種別の警報を出力すべき状況にあるかどうかを判定し、警報を出力すべき状況にあれば、その警報種別の警報を表す音声を警報出力制御部12に出力する。ただし、警報生成部8は、「障害有り」が登録されている警報種別については、その警報種別の警報を表す音声を出力しない。
(もっと読む)
ナビゲーション装置
【課題】 有料道路の割引を有効に活用することができる経路を探索することができる「ナビゲーション装置」を提供すること。
【解決手段】 現在地から目的地までの誘導経路を探索する経路探索手段6を備えたナビゲーション装置1であって、有料道路の距離および区間の少なくとも一方に関する割引情報を取得する割引情報取得手段9を備え、前記経路探索手段6が、前記割引情報取得手段9によって取得された割引情報を参照して、前記割引情報に対応する割引の適用を受けることができるような誘導経路を探索すること。
(もっと読む)
画像処理装置及び画像処理方法
【課題】 消費電力を低減させることが可能な画像処理装置及び画像処理方法を提供する。
【解決手段】 CPU409が、周囲の状態に基づいてブレーキを動作させる、ブレーキシステムが動作しているか否かを判定し、判定の結果、ブレーキシステムが動作していない場合に、取得した画像データを処理する画像処理ASIC407若しくは画像処理ASIC407のメモリ414の動作を停止させ、又は、画像処理ASIC407の処理周期を長くする。
(もっと読む)
車両用情報提供システム
【課題】 走行区域に応じた情報を提供できる車両用情報提供システムを提供する。
【解決手段】 車両用情報提供システム1は、車両用ナビゲーション装置2と、広域通信網4を介して通信可能な情報提供サーバ3とを含んで構成されている。車両用ナビゲーション装置2の位置検出器6により自車位置を検出し、制御回路5は、自車位置が特定区域であるか否かを判断し、自車位置が特定区域であるときに特定区域走行通知を情報提供サーバ3へ送信し、自車位置が特定区域以外であるときに特定区域外走行通知を情報提供サーバ3へ送信する。そして、情報提供サーバ3は、特定区域走行通知を受信したときには当該特定区域における特定ジャンルの情報を送信し、特定区域外走行通知を受信したときには前記特定ジャンルとは別の情報を送信する。そして、情報を受けた制御回路5は、この情報を表示装置9及びスピーカ11に報知させる。
(もっと読む)
公道駐車管理システム及び公道駐車管理方法
【課題】公道の地域性に基づいて、集約的かつ融通的に駐車規制を管理可能な公道駐車管理システムおよび公道駐車管理方法を提供する。
【解決手段】車両1には、GPS位置計測装置4、無線通信装置7、音声出力装置5及びディスプレイ6が設けられ、基地局41には、固定通信局43と、データサーバ50と、GPS固定受信局44と、駐車管理制御装置46と、通信端末45とが設けられる。車両1から基地局41に駐車位置の情報が送信されると、固定基地局41は、データサーバ50に記憶された駐車禁止区域及び駐車許可区域の位置情報に基づいて駐車許可か禁止かを判定する。駐車禁止の場合には、車両1の運転者に対して駐車違反であることが音声出力装置5及びディスプレイ6により警告される。警告に応じずに駐車違反を継続する車両1や、有料の駐車許可区域に駐車する車両1の反則金・駐車料金の算出が行われる。
(もっと読む)
車両の制御装置
【課題】 衝突事故の発生時に自車両に入力される衝撃荷重を適正かつ効果的に緩和できるようにする。
【解決手段】 自車両の前方に存在する対向車両の情報を検出する前方情報検出手段9と、この前方情報の検出結果に基づいて対向車両が自車両に衝突することが予知されたときに、衝突が発生すると予測された衝突予測時点よりも前に乗員に対する警告を行うとともに、所定のタイミングでブレーキ装置5を作動させて車両に制動力を付与する衝突制御手段2と、自車両が後進状態にあるか否かを検出する後進検出手段16と、自車両の後進状態で対向車両が自車両に衝突することが予知された場合に、上記衝突制御手段2によるブレーキ装置5の作動を制限する制動制限手段3とを設けた。
(もっと読む)
道路地図表示装置及びカーナビゲーション装置
【課題】 車両を走行させた際の実状に合った表示形態で道路を表示することができる道路地図表示装置及びカーナビゲーション装置を提供する。
【解決手段】 カーナビゲーション装置は、同一道路を走行したときは、その道路を走行した平均速度を求める。道路地図を表示する場合に平均速度を求めた道路と同一種別の道路を表示する場合は、平均速度が最も近い道路を表示する。従って、山道Aを走行した際の車両の平均速度が大きかった場合は、その道路と同一種別の道路を表示するときは、あたかも幹線道路Bのように表示されるので、幹線道路Bが渋滞していた場合は、山道Aに迂回することができる。この場合、運転者は、山道Aを幹線道路Bと同じ平均速度を維持して走行することができるので、走行時間が過度に長くなってしまうことはない。
(もっと読む)
情報表示装置
【課題】 運転者に伝達すべき情報(例えば緊急度が高い情報や重要度が高い情報)をできるだけ確実に運転者へ伝達することができる情報表示装置を提供すること。
【解決手段】 車両と接触する可能性のある物体を識別し、その危険度に応じて二種類の警告表示を行う。具体的には、危険度が所定の閾値よりも低い場合は、二次元の矢印63を運転者に認識させることによって警告を行い、危険度が所定の閾値よりも高い場合は、運転者に向く三次元の矢印67(円柱と円錐によって構成された矢印)を運転者に認識させることによって警告を行う。このように危険度に応じて二種類の警告を行うことにより、危険度が高い場合の警告がより効果的になる。
(もっと読む)
施設検索装置
【課題】 ユーザーが施設名称を入力したとき、以前の名称であっても検索を可能にする。
【解決手段】 車両用ナビゲーション装置1の制御回路2は、操作スイッチ群7などにより施設名称が入力されると、情報記録媒体14の最新施設情報データから当該入力施設名称の有無を判断し、有りが判断されれば、該入力施設名称に対応する最新施設情報及び地図上の位置情報を表示装置6に表示する。前記入力施設名称無しが判断されると、次に当該入力施設名称の有無を、情報記録媒体14の前記旧施設情報データから判断する。そして、前記入力施設名称有りが判断されると、前記旧施設情報及びこれに関連する最新施設情報並びに地図上の位置情報を表示装置6に表示する。従って、旧施設名称が入力されてもこの旧施設名称から最新の施設名称及び地図上の位置を認識できる。
(もっと読む)
車両制御システム
【課題】 本発明は、交差点における円滑な交通制御を実現することができる車両制御システムの提供を目的とする。
【解決手段】 本発明は、交差点に進入すべく交差点に接近する車両を検出する車両検出手段と、車両検出手段により検出した車両の中から、交差点において交錯の可能性がある車両を選別する対象車両選択手段と、対象車両選択手段により選択した対象車両のうち、交差点に対して同一方に接近する複数の車両に対して、車間距離を制御する車両制御手段と、を備えることを特徴とする。
(もっと読む)
自動車の走行制御装置及び方法
【課題】道路形状に応じて自動車を走行制御するシステムにおいて、ACCの先行車追従制御から道路形状に応じた速度制御への切り替え時に、乗員に違和感を与えない速度制御を実現する。
【解決手段】自車前方の先行車との車間距離に応じて第1の目標速度を演算し、道路情報に応じて第2の目標速度を演算し、前記第1の目標速度に応じて自車の速度を制御する第1の制御モードから、前記第2の目標速度に応じて自車の速度を制御する第2の制御モードへ切り替える際に、自車の加減速度が所定の範囲内になるように自車の速度を制御する。
(もっと読む)
車両の走行支援装置
【課題】 自車両から直接的に視認することが困難な歩行者の存在を自車両の乗員に的確に認識させる。
【解決手段】 支援判定部24は、歩行者検知部21の検知結果と、歩行者情報抽出部22により抽出した歩行者の情報とを比較し、少なくとも先行車両により検知された歩行者の情報に基づき自車両の走行を支援する。支援判定部24は、先行車両により検知された歩行者の位置および移動速度および移動方向に基づき、この歩行者の危険度、例えば自車両の走行の支障となる可能性や、例えば自車両と歩行者との接触や衝突が発生する可能性等を、自車両状態取得部23から出力される自車両の位置および走行状態の情報に基づき判定し、自車両の走行の支障となる可能性があると判定された歩行者を対象として、制動装置15および警報装置16の作動を制御する。
(もっと読む)
4,001 - 4,020 / 4,855
[ Back to top ]