
Fターム[5H180LL07]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 合図、警報を出力するもの (5,461) | 音による警報であるもの (2,307)
Fターム[5H180LL07]に分類される特許
2,201 - 2,220 / 2,307
衝突予測方法及び衝突予測装置

【課題】自車の走行環境や走行状態の複数個の要因に基く衝突可能性の判定精度の低化を考慮して衝突可能性を予測し、実際の走行環境下においても衝突可能性の予測ミスが極力発生しないようにする。
【解決手段】レーダ装置2の自車前方の探査及び自車1の走行状態の検出監視に基いて自車前方の先行車等の障害物と自車1との衝突可能性を判定し、自車1の走行環境、走行状態に関連する複数個の走行指標毎に設定された衝突可能性の判定結果の信頼度特性から、各走行指標の現在値それぞれに基く衝突可能性の判定結果の個別信頼度を算出し、各個別信頼度を統合して前記判定結果の統合信頼度を決定し、統合信頼度にしたがって判定結果を補正し、補正後の判定結果から障害物と自車1との衝突可能性を予測する。
(もっと読む)
接触脱輪回避ナビゲーションシステム

【課題】 車両走行軌跡を3次元的に捉え、車両走行軌跡と合致した障害物の回避が正確に行えるような接触脱輪回避ナビゲーションシステムを提供する。
【解決手段】 車両走行軌跡を3次元的に捉えた3次元予想走行軌跡を求め、この3次元予想走行軌跡が障害物と重なる場合に、回避経路を求めるようにしている。このため、実際の車両走行軌跡と合致した障害物の回避を正確に行うことが可能となる。また、障害物が路面に存在する凹部である場合や、高さの低い凸物体であった場合には、全車輪の車輪軌跡がその障害物を通過するか否かを判断するとともに、3次元的に捉えた3次元予想走行軌跡から車両形状が接触するかどうかに応じて回避経路を求めるようにしている。これにより、車両の高さを考慮した回避経路を求めることが可能となる。
(もっと読む)
監視装置
【課題】 運転中のドライバの視認性を損うことなく、ドライバの顔を適切に撮影することができる車室内監視装置を提供する。
【解決手段】 撮影手段3によって撮影した車両室内の画像を解析し、車両室内を監視する車室内監視装置であって、可視光を透過し不可視光を反射する反射部2を運転席の正面に設けると共に、反射部2によって反射された乗員の不可視光による像を撮影可能な撮影手段3を備える。
(もっと読む)
車両の速度の、許容最高速度への調整設定システムおよび方法
本発明は、機関介入操作を用いて車両の実現可能な走行速度を最大値に制限する制限装置(2)と、走行期間中に許容最高速度が変化すると前記制限装置(2)が走行速度を変化した最大値に制限するようにさせるインフォメーション装置(1)とを用いて、車両の速度を許容最高速度に調整設定するためのシステムおよび方法に関する。本発明によれば、インフォメーション装置(1)は現在走行している道路タイプを識別するための装置でありかつインフォメーション装置(1)はメモリ装置(7)から現在走行している道路タイプに属している許容最高速度を読み出しかつ変更された最大値として考慮する。  (もっと読む)
(もっと読む)
ドライバーサポート方法および装置
ドライバーに例えば車線を逸脱する前に警告する警告しきい値がドライバー状態および/または走行状況に依存して適応整合されるドライバーサポート方法および装置が提供される。  (もっと読む)
(もっと読む)
運転支援装置
【課題】 自車両が他車両の運行に与える影響を積極的に評価して、これを他車両に発信することを可能とした車々間通信手段を備える運転支援装置を提供する。
【解決手段】 他車両B〜Dから車々間通信によって位置・速度情報を取得し、取得した位置・速度情報を基にして周囲の交通流の状況を推定し、後ろから来た車両Bが車線300aをはみ出して追い越したり、これに伴い、対向車線300cの車両Cが通過待ちのため停車するなどして、駐車中の自車両が交通障害の原因になっていると判定した場合は、灯火装置を点滅させる等して周囲に自車両の存在を知らしめるとともに、他の車両B〜Dに対して車々間通信により駐車中の自車の存在を報知する。
(もっと読む)
ナビゲーション装置およびそのプログラムを記憶したコンピュータ読取り可能な記録媒体
【課題】ナビゲーションシステムに記憶されている道路情報に基づいて道路形状を精密に判定する。
【解決手段】ナビゲーションシステム装置に格納されている道路情報から道路形状に関する曲率情報を抽出し、抽出された曲率情報から、先方の道路がワインディング道路か否かを判断する際、曲率情報の他に道路種別や交差点の有無、道幅、直線道路か否か等を考慮して、そのような属性を有する道路については、曲率情報の修正を行い、ワインディング道路判定を精密に行う。
(もっと読む)
ドライバーサポート方法および装置
車線変更の際にドライバー状態および車線変更意図に依存して警告信号が出力される、ドライバーサポート方法および装置が提案される。  (もっと読む)
(もっと読む)
駐車支援装置
【課題】 本発明は、駐車枠に対し車両がどの程度傾いているかの情報を運転者に提示して、駐車枠に対して車両を平行にすることが容易となる駐車支援装置を提供することを目的とする。
【解決手段】 カメラにより撮影された画像から目標駐車位置を認識する認識手段S14,S16と、画像から目標駐車位置が認識されないときに、過去に認識された目標駐車位置と、車両の操舵角及び車輪速の履歴から目標駐車位置を推定する推定手段S20と、推定された目標駐車位置に対する車両の傾き度合いを算出する算出手段S24,S34と、前記画像に前記推定された目標駐車位置に対する車両の傾き度合いを合成表示する合成表示手段S24,S34を有する。
(もっと読む)
車両用後側方警報装置
【課題】 ガードレールや壁等の路側の静止物に対しては警報せず、後方から接近する車両や自車両の死角領域に留まる車両に対しては確実に警報する車両用後側方警報装置を提供する。
【解決手段】 警報対象判定手段は、ピーク検出手段により求められたピークタイミングをもとに着目するサンプリングタイミングを設定する着目サンプリングタイミング設定手段と、着目されたサンプリングタイミングのFFT演算結果について、周波数閾値設定手段により設定された周波数閾値以上の周波数成分が存在するか否かを判定する周波数判定手段とを備え、前方接近物認識手段により、物体が自車両の前方方向から接近していると判定された場合において、周波数判定手段により周波数閾値以上の周波数成分が存在すると判定されたときに、この物体は静止物であるとして警報対象でないと判定する。
(もっと読む)
車両用衝突時間推定装置及び車両用衝突時間推定方法
【課題】衝突時間の算出を容易にすると共に、位置検出誤差に対してロバストな出力を得ることを可能にする。
【解決手段】撮像手段2が車両周囲の画像を撮像し、エッジ抽出手段3が撮像手段2が撮像した画像の中からエッジ画像を抽出し、エッジ幅規格化手段4がエッジ抽出手段3により抽出されたエッジ画像のエッジ幅を規格化し、投票手段5が、エッジ幅規格化手段4により規格化されたエッジ画像について、エッジ画像が検出された位置に対応するカウント値を増数すると共に、エッジ画像が検出されなかった位置に対応するカウント値を初期化し、移動速度検出手段6がカウント値の傾きに基づいてエッジ抽出手段3により抽出されたエッジ画像の移動方向と移動速度を算出し、衝突時間算出手段7が、移動速度検出手段6により算出されたエッジ画像の位置及び移動速度を利用して、対象物との衝突時間を算出する。
(もっと読む)
走行支援装置
【課題】 自車両や他車両のドライバの意思を考慮して的確に情報提供を行う。
【解決手段】 車々間通信により他車両の走行状態、ドライバの操作量等の他車両情報を受信し、他車両が接近車両であり且つ自車両と他車両とが交差すると予測される交差位置までの所要時間Tがしきい値Tα以下であるかを判断する(ステップS1〜ステップS7)。これらを満足するとき、進入しようとしている走行路に接近車両が存在する状態で、自車両のドライバに発進或いは進入の意思があるか、また、接近車両のドライバに接近車両の走行路に進入しようとしている車両が存在する状態でこの進入車両の進入を許容する意思があるかを、進入の意思又は進入を許容する意思の度合に応じて3段階のレベルに設定する(ステップS8、S9)。そして、接近車両及び自車両のドライバの意思のレベルに応じて、情報提供レベルを設定し、これに応じて情報提供を行う(ステップS10、S11)。
(もっと読む)
危険車両予測装置
【課題】 より多くの危険事象で警報を報知する危険車両予測装置を提供すること。
【解決手段】 危険車両予測装置は、自車両を基準として、周囲を走行中の他車両の方向及び/又は距離を検出する周囲車両検出部121と、自車両、及び周囲車両検出部121により検出された他車両のそれぞれについて、過去から現在に至る挙動を示す挙動情報を累積する車両挙動累積部125と、車両挙動累積部125で累積された挙動情報のそれぞれに基づいて、周囲車両検出部121で検出された他車両から、近い将来危険を及ぼす可能性があるものを危険車両として予測する危険車両予測部126とを備える。
(もっと読む)
駐車動作中の車両の運転手を支援する方法及び装置
本発明は、駐車動作時の車両の運転者を支援する方法及び装置に関する。駐車状況画像は画像表示装置で運転者に表示され、その画面には駐車スペース(7)の平面図が最適設定位置(4)、設定経路(5)、及び第1及び第2の車両(2)と共に提示される。最適設定位置(4)は、駐車スペース(7)内で車両がとる位置に対応し、第1の車両(1)は現在位置に対応し、第2の車両(2)は、かじ取り角により変化し得る、予想される目標位置の車両に対応する。  (もっと読む)
(もっと読む)
車両の空間内に対象を投影するための装置
本発明では、車両の空間内に対象を投影するための装置が提案されている。この対象は、有利にはホログラフィックに投影され、この装置には音声入出力機能が割当てられている。それによりドライバに対して人工的な同乗者が提供される。  (もっと読む)
(もっと読む)
移動体ナビゲート情報表示方法および移動体ナビゲート情報表示装置
画像データ生成部(405)は、道路形状データと道路形状モデルとの照合を行うことにより、姿勢データを推定すると共に、ナビゲート情報の画像を、移動体の前方の道路の実写映像中またはフロントガラス越しに見える実際の景観中の適切な位置に正確に合成して表示するための映像(画像)データを生成する。映像表示部(5)はその映像データに基づいた表示を行う。ナビゲート情報を、移動体の前方の道路の実写映像中または実際の景観中における適切な位置に正確に投影した表示を行うことができ、ナビゲート情報と実写映像または実視景観との対応関係をドライバーが直観的に正確に認識することが可能になる。 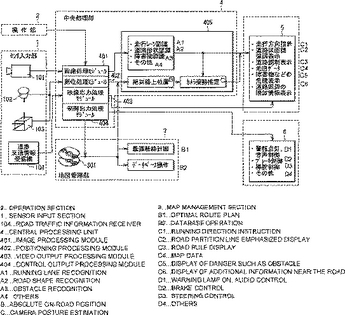 (もっと読む)
(もっと読む)
車速警告装置
【課題】 映像判断技術手段により道路側における速度制限標識の制限数字と比較すると共に、警告を出す車速警告装置を提供する。
【解決手段】 車の内側又は外側の適当な位置に設けられることにより道路の映像を収録する映像感知部材と、前記映像感知部材の出力端と接続する映像転換界面と、前記映像転換界面の出力端と接続すると共に、分析データを出力する映像処理部材と、前記映像処理部材の出力端と接続すると共に、分析データを実際の車速と比較するマイクロプロセッサーと、前記マイクロプロセッサーの入力端と接続すると共に、実際の車速データを比較データとしてマイクロプロセッサーに提供する車速感知部材と、前記マイクロプロセッサーの出力端と接続するモニターと、前記マイクロプロセッサーの出力端と接続することにより、警告のメッセージを発生する警告部材とを備えることを特徴とする。
(もっと読む)
走行支援装置
【課題】 右折する際に、何れかの対向車線の車両に進路を譲る意思があるとき、他の対向車線の車両に対し、進路を譲るよう依頼し、速やかな右折を実現する。
【解決手段】 自車両と他車両との予測される軌道が交差し、交差位置までの到達所要時間がしきい値以下であり、且つ複数の車線に存在する車両と交差する状況にあるとき、つまり、右折等自車両が複数車線を横断しようとしているとき(ステップS1〜ステップS7)、各走行車線の車両の通行意思を推測し、何れかの車両に進路を譲る意思があるとき、他の車両に対し譲歩依頼を送信する。所定時間経過しても譲歩依頼を送信した車両に進路を譲る意思が見られないときには、進路を譲る意思のある車両に対し、通行を辞退する通知を行う(ステップS8〜ステップS11)。
(もっと読む)
走行支援装置
【課題】 適切な車線変更が行える走行支援装置を提供すること。
【解決手段】 隣りの車線を走行する二台の車両B、Cの間に割り込んで車線変更するときに車線変更を行う車両Aの運転者の運転操作を支援する走行支援装置であって、二台の車両B、Cの車間が狭いほど車線変更のための操舵速度が遅くなるように操舵支援する。これにより、車線変更後に後続車となる他車Cに対して余裕を持って車線変更を認知させることができ、円滑な車線変更が可能となる。
(もっと読む)
車載装置
【課題】周囲車両の存在を把握し、運転者に迅速且つ確実に周囲車両の存在を知らせる。
【解決手段】自車両の周囲に存在する物体を検出するセンサ装置100と、センサ装置100が検出した物体の画像を前記自車両を中心に表示させる画像処理を行う画像処理装置102と、画像処理装置102で画像処理した画像を表示するディスプレイ103とを備える。
(もっと読む)
2,201 - 2,220 / 2,307
[ Back to top ]