
Fターム[5H209BB08]の内容
Fターム[5H209BB08]に分類される特許
1 - 20 / 32
車両用制御装置
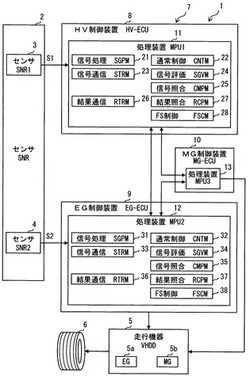
【課題】センサに関連する異常、および処理装置の異常を検出する。
【解決手段】車両用制御装置1は、二重化されたセンサ2と、第1の処理装置11と、第2の処理装置12とを備える。センサ2は、第1の出力信号S1を発生する第1のセンサ3と、第2の出力信号S2を発生する第2のセンサ4とを備える。第1の出力信号S1は、第1の処理装置11に入力される。第2の出力信号S2は、第2の処理装置12に入力される。処理装置11、12は、第1の出力信号S1と前記第2の出力信号S2とを入手するための信号通信部23、33を備える。処理装置11、12は、第1の出力信号S1と第2の出力信号S2とを照合し、センサまたは処理装置の異常を判定する信号照合部25、35を備える。処理装置11、12は、判定の結果R1、R2を入手する結果通信部26、36と、結果を照合する結果照合部27、37とを備えることができる。
(もっと読む)
ポジショナ

【課題】調整電流のループに電子スイッチを配置することなく、ソフトウェアに依存しない緊急遮断機能を得る。
【解決手段】比較回路6において、上位装置100からの制御信号の値とその制御信号に対して定められている正常範囲とを比較し、その比較結果を制御ユニット1に送るようにする。制御ユニット1は、比較回路6より制御信号の値が正常範囲を逸脱している旨の比較結果が送られてきた場合、制御信号が示す値(設定開度θsp)と弁開度信号が示す値(実開度θpv)との偏差に拘わらず、電空変換器2への電流信号(調整電流)Ioを強制的に調整して零とする。この制御ユニット1における電流の調整は、制御ユニット1が有している通常の機能、すなわちθspとθpvとの偏差に応じて電流信号(調整電流)Ioの値を連続的に変化させる機能を利用して行われる。
(もっと読む)
プロセス制御システムと資産管理システム間のソフトウェアロックアウト調整
【課題】メンテナンス技術者のロックアウトを防止する。
【解決手段】プロセス制御システムは、プラント安全機構を実現するため、特にプロセスプラント内の1以上のプロセス制御設備資源への意図的でない変更、又は不必要な動作を防ぐために関連づけられた資産管理システムと調整する。メンテナンス技術者は、資産管理システムをプロセス制御設備資源の1以上へのアクセスを要求するために使う。プロセスオペレータは、プロセス制御システムを介して要求を受信し、要求を承諾又は拒否する。プロセスオペレータが要求を承諾したプロセス制御設備資源は、一部又は全体において、プロセス制御システムによって動作不能になる。メンテナンスタスクが完了すると、メンテナンス技術者はプロセスオペレータにプロセス制御設備資源の制御の返却を要求する。返却は、プロセスオペレータがプロセス制御システムへの資源の返却を確認した場合に完了する。
(もっと読む)
ロボットのコントローラ
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
モータの駆動制御システムおよび駆動制御方法
【課題】位置検出データの転送誤りを敏速に検出することにより、初回稼動時から不用意な暴走を確実に防止する駆動制御システムを提供する。
【解決手段】位置検出器に位置データの監視機能をもたせ、位置検出器が保持した最新位置データと、サーボ制御装置から出力させた最新位置データのエコーバック信号とを比較判定して、差異があるときには駆動禁止状態に遷移して、駆動禁止信号をサーボ制御装置に出力する。サーボ制御装置では、駆動禁止信号を入力すると駆動禁止状態に遷移して、フィードバック用位置データを最新位置データから推定位置データに切替え、指令信号を運転指令から所定の停止制御指令信号に切替え、速度、トルクがゼロに下がるまでは駆動を継続しながらモータを停止させる。
(もっと読む)
サーボシステム、サーボモータ駆動装置、セーフティユニットおよびサーボシステムの制御方法
【課題】サーボシステムに用いられるエンコーダを、安全機能を有するものに入れ替えることなく、サーボシステムの安全化を図る。
【解決手段】サーボドライバ4は、コントローラ5からの指令信号に基づいて、サーボモータ2の動作に関する指令値を設定する。サーボドライバ4は、その指令値およびフィードバック信号から得られたフィードバック値をセーフティユニット10に送信する。サーボドライバ4から送られた指令値およびフィードバック値の少なくとも一方の値が異常である場合に、STO信号を発生させるとともに、そのSTO信号をサーボドライバ4に送信する。サーボドライバ4にSTO信号が入力された場合、サーボドライバ4はサーボモータ2への電力の供給を停止する。従来から使用されていたエンコーダを用いて安全規格に適合したサーボシステムを構築することが可能となる。
(もっと読む)
故障予測装置
【課題】駆動機構における故障を非常に簡易な制御によって確実かつ容易に予測することができ、しかも、安全かつ利便性が損なわれない位置で物体を停止させることで、製品として最低限の機能を果たすことができる故障予測装置を提供する。
【解決手段】制御手段60は、変位検知手段50から出力されたパルス信号に基づき便器の移動距離を算出し、アクチュエータ30が作動する毎に移動距離を積算し、アクチュエータ30の耐久寿命を便器の移動距離に換算して定めた寿命距離と前記積算値とを比較し、積算値が寿命距離に到達した場合に、アクチュエータ30は故障が予測される状態にあると判定して、その旨の警告を行う。また、警告後に、操作部70の入力操作によるアクチュエータ30の作動を下降のみに規制する。
(もっと読む)
安全関連制御ユニットおよび自動化設備の制御方法
【課題】安全関連制御ユニットの外部で発生した故障に対する適用性を高めると同時にコストを低減する。
【解決手段】複数のセンサ(16)および複数のアクチュエータ(14)を備え、前記アクチュエータ(14)を制御するための複数の制御命令(44, 46, 48)を含み、複数の第1プログラム変数を処理することにより前記制御命令の少なくとも一部(44)を実行するように設計されている第1プロセッサ(20)を備える。第一プロセッサ(20)は第1の規定タイミングに少なくとも1つの前記第1プログラム変数(FSV1A)に対して存在する瞬時値(FSV1A(n))に応じて前記第1プログラム変数(FSV1A)の第1試験値(CRCFSV1A(n))を決定するように設計されている。さらに前記第1試験値(CRCFSV1A(n))に対応する第2試験値(CRCFSV1B(n))を決定するように設計されている前記第2プロセッサ(22)と、前記瞬時値(FSV1A(n))、前記第1試験値(CRCFSV1A(n)、および前記第2試験値(CRCFSV1B(n))を記憶するように設計されているデータメモリ(92)とを備える。
(もっと読む)
安全コントローラおよび自動化設備を制御する方法
【課題】安全コントローラの応答時間を短縮すると同時に安全コントローラを実装するコストを低減し、それによってその応用性に関して最適にされた、より高速でよりフレキシブルな安全コントローラを提供する。
【解決手段】少なくとも一部のコントローラハードウェアコンポーネント(26)が各自のプロジェクトデータメモリ(52, 52’, 52’’, 52’’’, 52’’’’)を有しており、前記プロジェクトデータメモリ(52, 52’, 52’’, 52’’’, 52’’’’)のそれぞれはプロジェクトデータ(130)を記憶するように設計されている。前記コントローラハードウェアコンポーネント(26)を互いに接続する接続ユニット(34)と、前記接続ユニット(34)を介して前記プロジェクトデータ(130)を前記プロジェクトデータメモリ(52, 52’, 52’’, 52’’’, 52’’’’)に分配するように設計されている分配ユニット(52, 142)と、を含む。
(もっと読む)
安全関連制御ユニット用アプリケーションプログラムの生成方法および装置
【課題】ユーザプログラムの生成ひいては安全コントローラの製造の柔軟性をさらに向上させて安全コントローラの迅速かつ安価なプログラミングを可能とする。
【解決手段】ユーザプログラムのソースコード(52)を生成するステップであって、前記ソースコード(52)が前記アクチュエータ(24)を制御するための複数の制御命令(160, 162)および診断レポートを生成するための複数の診断命令(164, 166)を含み、前記制御命令(160, 162)の実行中に安全関連プログラム変数がフェイルセーフ的に処理されるステップと、前記ソースコード(52)に基づいてマシンコード(70)を生成するステップと、少なくとも1つのチェックサム(102, 104)を決定するステップであって、前記チェックサム(102, 104)が前記マシンコード(70)の少なくとも一部に対して決定され、前記チェックサム(102, 104)の決定に際して前記診断命令(164, 166)が無視されるステップと、を含む方法。
(もっと読む)
ビルトインテスト回路を内蔵したジンバル制御システム
【課題】本発明は、ジンバル制御システムにビルトインテスト回路を設け、このビルトインテスト回路によって励磁信号の有無を検出し、異常時のジンバルの損傷を防止することを目的とする。
【解決手段】本発明によるビルトインテスト回路を内蔵したジンバル制御システムは、ジンバル制御システム(2)にビルトインテスト回路(18)が内蔵され、このビルトインテスト回路(18)により、レゾルバリファレンス出力回路(13)からの励磁信号(14)の有無を検出し、この励磁信号(14)が停止した状態で三相ブラシレスモータ(7)への駆動信号(6)を停止し、ジンバルのストッパへの可動子の衝突を防止し、ジンバルの損傷防止を行う構成である。
(もっと読む)
多重冗長系制御システム
【課題】構成を複雑化せずに被制御対象に対する制御系統を冗長化し、複数の制御系統のうちいずれかの制御系統が故障した場合であっても、システム全体における制御に影響を生じさせず、システム全体の信頼性を向上させることができることを目的とする。
【解決手段】相互に接続され自系統の情報の出力及び他系統の情報の入力を行う複数の制御系統を有する制御装置10により、少なくとも1以上の制御対象30a,30bを駆動制御する多重冗長系制御システムであって、複数の制御系統11,12,13が、それぞれ自系統又は他系統の故障を判定し、判定結果に基づいて制御対象に対するそれぞれの制御量に応じた制御信号を出力する。そして、この制御信号に基づいて、信号生成手段により制御対象を駆動制御するための主制御信号を生成する。
(もっと読む)
サーボシステムおよび安全制御機器
【課題】サーボシステム全体を、安全機能を有するサーボシステムに入れ替えることなく、サーボシステムの安全化を図る。
【解決手段】サーボモータ2と、サーボモータ2に取り付けられたエンコーダ3の出力に基づいて、サーボモータ2の駆動を制御するサーボアンプ4とを備えるサーボシステムにおいて、エンコーダ3の出力に基づいて、異常の有無を監視し、異常が有るときには、サーボモータ2への駆動電力の供給を遮断する安全制御機器6を設けており、監視する内容を設定情報として設定できるようにしている。
(もっと読む)
制御システム及び制御方法
【課題】遠隔操作型、または自律動作型のロボット等の動作を制御するための制御システムであって、ロボット等及び制御システムの異常を確実に検出することができ、異常が生じた場合には、ロボット等が高速で動作しているときであっても慣性によって動作し続けることを防止して周囲に危険が及ぶことを防止し、また、ロボット等の重量及び容積を増大させることがなくロボット等の動作性能を劣化させることがない制御システムを提供する。
【解決手段】電源制御を行い一定周期でアライブメッセージを送信する電源制御コンピュータ1と、サーボドライバ5への速度指令を出力し一定周期でアライブメッセージを送信する駆動制御コンピュータ2と、これらコンピュータ1,2を接続する通信回線3とを備え、各コンピュータ1,2のいずれかがアライブメッセージを受信しなくなった場合には、サーボドライバ5へ停止指令を出力し、その後、駆動系への電源供給を遮断する。
(もっと読む)
桁探索木の初期危険因子解析装置
【課題】桁探索木の初期危険因子解析装置を提供する。
【解決手段】所定の安全関連ディジタルコントロールシステムについて、それぞれ、所定の解析ユニットでソフト障害が、安全解析の各仮想事件に与える影響を測定すう安全解析報告モジュールと、各深度防衛階層処理で原子炉の作動やシャットダウン及び冷却が制御される桁探索木モジュールと、からなる。これにより、システム化に、主要危険因子を識別でき、また、原子力発電所の安全コントロールシステム設計の弱点も確認されることができ、そのため、アナログ予備用システムのハード接続回線手動駆動措置の不足も、強化され、簡素化且つ有効的に、多様性と深度防衛(解析が実現され、また、ソフト共通形態である障害の関連事件が発生する時、作業員の工作負荷や責任も、適当に分離され、他の発電所のパラメータの変化を見逃すことがない。
(もっと読む)
制御システムおよび制御方法
【課題】通信経路に障害が生じても、適切に危険な状態を回避できる制御システムを提供する。
【解決手段】制御ユニットが階層構造に構成された制御システムにおいて、階層構造とは別に非常状態を他の制御ユニットに通知するための非常通信経路を設けることによって、階層構造の通信障害に対しても適切に危険な状態を回避できる制御システムを構成する。さらに、各制御ユニットは所定の時間が経過すると、あらかじめ決められた動作を行うことによっても危険な状態を回避できる。
(もっと読む)
システムに対する制御装置および制御装置の駆動方法
【課題】実行中のモジュール間のクロス依存関係を、別のモジュールの実行時に考慮できるように構成することである。
【解決手段】第1の記憶手段が設けられており、該記憶手段には、モジュール(10,11)の相互間の障害が記憶されており、第2の記憶手段が設けられており、該記憶手段には、どのモジュール(10,11)がすでに作動されているかが記憶されており、スケジューラ(12)は別のモジュールの作動のために第1および第2の記憶手段に基づいて、別のモジュールの作動によってモジュール間に障害が発生し得るか否かを検出し、スケジューラ(12)は、相互に障害を与えるモジュール(10,11)が同時に作動することを阻止する。
(もっと読む)
航走体の安定ロバスト制御装置、安定ロバスト制御システム、その方法およびプログラム
【課題】舵駆動源が故障し、かつ、正常に動作する舵駆動源が残っている場合においても、水中航走体の姿勢を安定に保つことのできる安定ロバスト制御装置を提供する。
【解決手段】安定ロバスト制御装置10は、舵駆動源7の故障を検知する故障検知手段11と、水中航走体1の姿勢に関する情報を検知するセンサ8にて検出した検出値と目標値との偏差を算出する偏差算出手段14と、水中航走体1の姿勢制御用パラメータとして、偏差に基づいて水中航走体1に付与する制御力および制御モーメントを算出する自動制御パラメータ算出手段15と、制御力および制御モーメントを、配分則に基づいて、各舵駆動源7に対して配分する配分量を算出すると共に、舵駆動源7の故障が検知された場合に、制御力および制御モーメントを、故障が検知された舵駆動源7を除く残りの舵駆動源7に対して再配分する配分量算出手段16とを備える。
(もっと読む)
モータ制御装置
【課題】ギャップ制御における異常を短時間で検知し、機器の破損を防止するモータ制御装置を提供する。
【解決手段】モータ2の位置を検出するエンコーダ3を用いて、位置指令とエンコーダ3の位置情報を比較することでモータ2の位置制御を行う位置制御器11と、モータ2で駆動されるワーク4と対象物の距離を測定するギャップセンサ5を用いて、ギャップ指令とギャップセンサ5からのフィードバック情報を比較することで、ワーク4と対象物間のギャップを一定に制御するギャップ制御器12と、ギャップセンサ12の有効範囲外では位置制御器11、有効範囲内ではギャップ制御器12に切り替えるモード切替器13と、モード切替器13とエンコーダ3とギャップセンサ5の情報から、モータ2を停止させる機能を備えた保護装置16とを備え、これらを同一の演算周期で動作させる。
(もっと読む)
電子制御装置
【課題】 2つの制御装置で相互監視を行うにあたり、通信負荷の軽減することができる電子制御装置を提供する。
【解決手段】 電子制御装置は、第一制御装置1および第二制御装置2を備えている。第一制御装置1は、前方サスペンション装置3Fの前方第一目標回転角TGFCL1を求め、第二制御装置2は、前方サスペンション装置3Fの前方第二目標回転角TGFCL2を求める。第二制御装置2は、前方第二目標回転角TGFCL2を第一制御装置1に出力する。第一制御装置1は、前方第一目標回転角TGFCL1と前方第二目標回転角TGFCL2とを比較し、その比較結果に基づいて、第一制御装置1の異常判定を行う。
(もっと読む)
1 - 20 / 32
[ Back to top ]