
Fターム[5H301BB13]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | ゴルフカート (18)
Fターム[5H301BB13]に分類される特許
1 - 18 / 18
車両用障害物検出装置及びそれを用いた車両
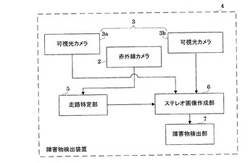
【課題】走路上の障害物を検出する障害物検出装置を提供する。
【解決手段】
車両前方を撮影する赤外線カメラ2と、車両前方を撮影するステレオカメラ3と、赤外線カメラ2により撮影された赤外線画像を基に走路を特定する走路特定部5と、ステレオカメラ2により撮影された各画像に基づいてステレオ画像を作成するステレオ画像作成部6と、走路特定部5により特定された走路とステレオ画像とに基づいて、走路上の障害物を特定する障害物検出部7とを備える。
(もっと読む)
衝突防止機能付き車両

【課題】障害物との衝突を防止しつつ、必要以上に車両の運動が制限されないことを可能とする。
【解決手段】 この車両は、入力された目標速度及び目標進行方向で車体50が所定時間だけ移動するときに車体が通過すると予測される車体通過予測領域と、障害物検知部で検出された障害物の位置とから、車体と障害物とが衝突するか否かを判定する。そして、車体と障害物とが衝突すると判定されるときは、入力部への入力に応じた目標速度及び目標進行方向の少なくとも一方を修正する。車体通過予測領域は、予め設定された車体モデル70に基づいて算出され、その車体モデル70は入力された目標速度及び目標進行方向に応じて変化する。
(もっと読む)
ゴルフカートおよびゴルフカート走行制御システム
【課題】円滑な移動が可能なゴルフカートおよびゴルフカート走行制御システムを提供することである。
【解決手段】電磁誘導線81上を2台のゴルフカート1A,1Baが同じ方向に順に走行する場合、ゴルフカート1Aは、1つ前のゴルフカート1Baからのカート情報を受信しかつ追突防止信号を受信する。その場合、ゴルフカート1Aは徐行または停止する。ゴルフカート1A,1Bbが電磁誘導線82,83上を互いに逆方向に走行する場合、ゴルフカート1Aが、1つ前以外のゴルフカート1Bbからのカート情報を受信し、かつ追突防止信号を受信する。その場合、ゴルフカート1A,1Bbは走行を継続する。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
電磁誘導式電動走行車
【課題】走行路に沿って敷設された誘導線から発生する磁界を検出して舵取り制御を行う電磁誘導式電動走行車が走行路から外れたときに、走行路への復帰を自動的に行わせる。
【解決手段】車体の誘導線からの位置ずれ量が、舵取り制御が可能な範囲を越えたときに脱線したとの判定を行う脱線判定手段31Eと、脱線が判定されたときに駆動輪3及び舵取り輪2に制動をかけて車体を停止させる脱線時制動制御手段31Fと、脱線判定時に舵が切られていた方向と同じ側に一杯に舵を切った状態で、停止させられた車体を舵取り制御が可能になる位置まで後退させて停止させるように舵取り装置4と電動駆動装置29と制動装置23とを制御する脱線復帰制御手段31Gとを設けた。
(もっと読む)
無人誘導車の追突防止装置に用いられる電波信号発生装置
【課題】 一定の送信出力を確保できるようにし、送信アンテナの規格公差を広げて、歩留まりを改善し、少ない部品で構成することができる無人誘導車の追突防止装置に用いられる電波信号発生装置を提供する。
【解決手段】 LC共振回路への出力電圧をフィードバックさせるためのフィードバック経路6を備え、所定周波数を出力する出力電圧を伝達する送信電圧設定回路2を備え、上記両出力電圧が入力され、これらの差分を増幅するための電圧誤差増幅器11を備え、基準三角波が予め設定された三角波発振周波数設定回路9を備え、基準三角波と、電圧誤差増幅器11の出力を比較する比較器8を備え、比較器の出力により、LC共振回路経路上のスイッチ素子4がデューティー制御され、電圧誤差増幅器11と、三角波発振周波数設定回路9と、比較器8の機能を有する集積回路3を実装した。
(もっと読む)
車両
【課題】 簡単な構成で検出した物体に応じた適正な走行制御をすることができる車両を提供すること。
【解決手段】 カート路CRを走行するゴルフカート10に、前方に超音波を発信し、障害物に衝突したときに反射してくる超音波を受信することにより前方に障害物があることを検出するとともにその大きさを検出する対象物センサ31,32と、対象物センサ31,32による障害物の検出の有無および対象物センサ31,32が障害物を検出したときにはその大きさに応じてゴルフカート10の走行を制御するコントローラ25とを設けた。また、対象物センサ31,32から発信される超音波による検出範囲の幅をゴルフカート10の幅よりも少し大きくなる程度に規制するための規制部材31a,32aを対象物センサ31,32に設けた。
(もっと読む)
車両
【課題】 誤検出することなく前方の車両や物体を検出できる衝突防止用のセンサを備えた車両を提供すること。
【解決手段】 ゴルフカート10に、追突防止センサと障害物センサ33a等を設けた。追突防止センサは、後方に電波aを発信する送信器31と、前方のゴルフカート10aとの距離が一定距離以内になったときにゴルフカート10aの送信器31から発信された電波aを受信する受信センサ32とからなる。障害物センサ33a等は、電波aの発信距離よりも長い距離に亘って前方に超音波bを発信し、物体に衝突して戻ってくる超音波bを受信することにより前方の物体を検出する。そして、受信センサ32が電波aを受信したときにゴルフカート10は停止し、受信センサ32が電波aを受信せず、障害物センサ33a等が物体を検出したときにゴルフカート10は低速走行するようにした。
(もっと読む)
動力車
【課題】操作者の操縦操作に応じて推進及び操舵を行うものにおける障害物との衝突を停止することなく回避する。
【解決手段】人が操作指示を行うための操作入力部4と該操作入力部に加えられた操作指示を検出する指示検出部Cと、加えられた指示に応じて操舵や推進のための動力を制御する制御手段CPUと、障害物を検出する障害物検知センサー5とを備える。また、障害物検知センサーによる障害物の検知出力に基づいて旋回動作中に車両に対して横移動の力を付加する衝突回避手段を備えている。停止することなく障害物を回避することができる。
(もっと読む)
車両制御方法およびシステム
本発明は、マイクロ波周波数帯域において送信する送信機を準備する工程と、車両上に受信手段を準備する工程と、信号を受信する工程と、車両に対する送信機の方位角を算出する工程とを含み、算出された方位角に基づいて車両が制御される、車両制御システムおよび方法を提供する。  (もっと読む)
(もっと読む)
ゴルフカーの誘導線センサ用支持装置
【課題】誘導線センサ支持装置の製造コストを低減する。
【解決手段】第1、第2のアーム22,23と、軸部材(ボス21)と、前記アームと操舵装置とを連結するタイロッド13の取付座28とを自己潤滑性を有する合成樹脂によって一体に形成する。前記取付座28は、第2のアームと軸部材とを結ぶ仮想線より上方に形成され、前記タイロッド13の一端部は、取付座28に上方から取付けられ、第1のアーム22における取付座28と軸部材との間には、ケーブルホルダー取付用の取付座30が形成される。第2のアームの車体前側の端部には、追突防止用センサ35の取付用ブラケット36が一体に形成される。追突防止用センサ35と誘導センサ12のケーブル35a,12aは、第1のアーム2の前端部にバンド38によって括り付けられ、かつ1本のケーブル収納用チューブ39に収納され、前記取付座30に取付けられたケーブルホルダー29に保持されている。
(もっと読む)
移動装置の物体検出方法
【課題】物体の種類や環境変化の条件などの影響により、移動装置において物体を検出できないことがあり、移動装置が物体に衝突することがある。
【解決手段】赤外線量検出部17で構成される物体検出機構13と、熱媒体放出部18から構成される熱媒体放出機構14と、制御機構15と、駆動機構16とを備える移動ロボット12によって物体の有無とその位置を検出することで、確実に物体を検出でき、移動ロボット12の安全性を高めることができる。
(もっと読む)
移動体の追従方法
【課題】従来の移動体の追従方法は、現在の追従目標物体、またはその経路を目標として追従移動を行っており、結果として、目標追従物体の背後を追従することであった。
【解決手段】本発明の移動体の追従方法は、追従目標物体1の位置を検出し、検出した位置を包含する3次元領域を求め、求めた3次元領域の所定の位置を目標として移動体2を移動させ、追従目標物体1に追従させることができ、追従目標物体1から一定領域離れた位置に移動体2が位置することで、追従目標物体1と安全かつ適切な位置関係を保つことができる。
(もっと読む)
ゴルフカート誘導システム
【課題】 自走式ゴルフカートの置き忘れによるプレーの遅延を防止することができるゴルフカートの誘導システムを提供する。
【解決手段】 一定周期でIDを電波により発信するRFIDタグ1を所持するプレイヤー2からの電波を自走式ゴルフカート3と固定アンテナ4により受信し、それらの受信時刻の差が最大となるまでは走行信号を、前記受信時刻の差が最大となったときは停止信号を基地局5から自走式ゴルフカート3に送信する。
(もっと読む)
追尾システム
【課題】追尾対象を限定することなく、かつ方向あるいは距離について広範囲に適用することのできる追尾システムを提供する。
【解決手段】第1の移動体に設けられた移動速度伝送装置1と、第1の移動体を追尾する第2の移動体に設けられた追尾装置2とを備え、移動速度伝送装置1は、第1の移動体の加速度を検出する加速度センサ3と、加速度に対して所定の処理を行い送信信号として出力する情報処理部4と、送信信号を無線電波5として送信する送信部6とを有し、追尾装置2は、無線電波5を受信して受信信号として出力する受信部7と、受信信号に基づいて第1の移動体に対する追尾速度を制御する制御部8とを有するものである。
(もっと読む)
電磁誘導式ゴルフカートの停止制御方式
【課題】 カート倉庫内で、前方に駐車中のゴルフカートの電源が既にOFFの場合でも、安全に、車間距離を詰めた状態で駐車が可能な電磁誘導式ゴルフカートの停止制御方式を提供する。
【解決手段】 送信器25と受信器26とを備えた追突防止装置27と、障害物検出装置44とを備えた電磁誘導式のゴルフカート30を用いる。そして、ゴルフカート30がカート倉庫へ入庫をする場合には、低速で走行させ、追突防止装置27の作動を停止させて、障害物検出装置44のみによって前方に障害物が検出されるまで走行を続けた後に停止をさせる。さらに、カート倉庫へ入庫をする場合には、通常速度で走行する場合に比べて、障害物検出装置44の検出距離を短くする。
(もっと読む)
特にゴルフコースでの物体を輸送するための自動駆動の車両
物体及び特にゴルフコースでの種々の物品を輸送するための車両で、車両上に設置された少なくとも1台の蓄電池により供給される少なくとも1台の電気牽引モーターから成り、一連の超音波センサーが、外部信号源から来た信号を検出でき、又、マイクロコンピュータ制御装置が前記センサーと、又、前記少なくとも1台の電気モーターの電子速度調節器と接続して、前記外部の基準信号源の位置を参照して、1セットの事前決定された位置を維持するように、自動的に案内される。車両/発信源の相対的位置を正確に決定するために、同一領域で動作している類似の車両との干渉を避けるために、車両のマイクロコンピュータ制御装置内で特別のアルゴリズムが実行される。  (もっと読む)
(もっと読む)
無人運転走行車両
【課題】任意の位置から自動走行開始位置へ自動で移動可能である。
【解決手段】測位システムを備え、運転者が乗車しないで自動走行する無人運転が可能な車両であり、自動走行コースの自動走行開始位置を設定する自動走行開始位置設定手段900と、自動走行開始位置を基点とする所定範囲を演算する所定範囲演算手段901と、現在の車両位置から走行開始位置までの走行経路を演算する走行経路演算手段902と、現在の車両位置が所定範囲内か否かを判断する判断手段903とを備える。
(もっと読む)
1 - 18 / 18
[ Back to top ]