
Fターム[5H301FF09]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の位置認識用固定設備 (875) | 移動経路とは直接関係なく設置されるもの (171) | 発光器 (45)
Fターム[5H301FF09]に分類される特許
1 - 20 / 45
重症心身障害者の自立的移動支援装置
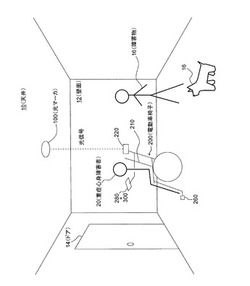
【課題】床にテープやガイドライン等を配置する必要が無く、レイアウト変更に対応可能な、重症心身障害者の自立的移動支援装置を提供する。
【解決手段】重症心身障害者の自立的移動支援装置において、移動空間の天井10や壁面12に配設された、該移動空間や移動装置200の進行方向に関する情報を発信するためのマーカ100と、移動装置200に配設された、前記マーカ100からの信号を受信するための受信手段220、周囲の壁面12や障害物16までの距離と方位を検出するための測位手段240、移動先を重症心身障害者20が指定可能な入力手段280、前記測位手段240の測定結果や前記マーカ100からの信号に基づき移動方向を判断して、前記入力手段280で指定された移動先まで移動装置200を移動するよう制御するための制御手段320、及び、該制御手段320の出力により移動装置200を駆動する駆動手段340と、を備える。
(もっと読む)
情報取得装置、情報取得方法、情報取得プログラム、及び、情報取得システム

【課題】移動可能なノードが複数存在する空間において、位置認識の確実性を向上させる。
【解決手段】作業空間内の各ロボット100は、3つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報を取得することにより、自己の絶対位置を判別する。また、作業空間内の各ロボット100は、2つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報と、当該他のロボット100の位置から自ノードであるロボット100への絶対方位の情報とを取得することにより、自己の絶対位置を判別する。
(もっと読む)
屋内用自律走行移動体の自己位置測定方法及び装置
【課題】人間がいるエリアを自律走行する場合であっても、屋内用の自律走行移動体の自己位置を、光源の追加無しに、同じエリアの人間に視覚的な違和感を持たせにくく、かつ、周辺の環境状態の影響を受けにくい形態で測定すること。
【解決手段】走行台車1に搭載したビデオカメラ4aの撮影画像中に、天井の複数の照明器3のうち最低1個が常に入るようにした。そして、各照明器3は、自己のユニークなID番号のパターンで変調した照明光を発光し、ビデオカメラ4aで撮影した照明器3とその設置位置を、受光センサ4bが受光したその照明器3からの照明光を復調して得たID番号に基づいて照合する。照合した照明器3の設置位置と、ビデオカメラ4aの撮影画像から計算したビデオカメラ4a乃至走行台車1からの照明器3の相対位置とに基づいて、走行台車1の自己位置を測定する。
(もっと読む)
侵入エリア検出システム
【課題】移動体に備える受光機において、投光機の投光する検出範囲に特定の方向から侵入した時のみ投光部の投光する光信号を検出させることを目的とする。
【解決手段】走行が可能で光信号を検出する受光機24を備える移動体20と、移動体20と脱着可能に構成され受光機24に光信号を投光する投光機32を備える移動体連結装置30とで構成される侵入エリア検出システム10であって、受光機24は、光信号を検出する複数の受光部25を扇状に備え、投光機32は、各受光部24と対になっており異なる種類の光信号を扇状に投光する投光部33を複数備え、受光部25は、各投光部33が光信号を投光することで特定する検出範囲に特定の方向から検出範囲に侵入した時のみ光信号を検出し、移動体20が投光部33が特定する検出範囲に侵入したことを検出することを特徴とする。
(もっと読む)
移動車両の制御システム
【課題】移動車両を下り段差へ近づけすぎることなく、危険領域で安全に進行方向を切り替えることのできる移動車両の制御システムを提供することを目的とする。
【解決手段】上記課題を解決するための本発明の移動車両の制御システムは、外部環境情報を検出する外部環境センサと受光した光より識別番号を検出する識別番号検出部とを有する移動車両と、前記識別番号を含む光を下り段差に照光する照光部と、前記外部環境情報を用いて前記移動車両の周囲の下り段差が位置する方向を算出する方向算出部と、前記移動車両の移動を制御すると共に、前記識別番号検出部で検出された識別番号が所定の番号である場合に前記方向算出部で算出された下り段差の存在する方向を進行禁止範囲として設定する制御部と、を備えたことを特徴とする。
(もっと読む)
モバイル機器のナビゲーション
【課題】ビーコンを用いて自己位置を決定する視覚ベースの自律ナビゲーションシステムにおいて、高精度かつ安価な位置決定方法を提供する。
【解決手段】モバイル機器(ロボット)680は撮像手段で取得した画像から少なくとも1つのビーコンA、B、C、D、E、F、G、H、I、J、K、Lの画像に対する空間情報を決定し、この空間情報に基づいて、モバイル機器の位置を判断する。空間情報を決定するステップは、少なくとも1つのビーコンの各ビーコンを特定する符号化された視覚情報に基づく。画像は、モバイル機器の周囲の環境の少なくとも一部の少なくとも1つのビーコンの画像を含む。モバイル機器にあらかじめ記憶された位置情報と特定されたビーコンの画像からモバイル機器の位置決定が可能となる。
(もっと読む)
光学式自己位置検知装置及び方法
【課題】検知位置精度が高く、自己の姿勢も検知可能な技術であって、簡易に実現可能な技術を提供することを目的とする。
【解決手段】移動フィールド20を移動する移動体10には、エリアセンサカメラ12が搭載されている。この移動フィールド20内の適当な位置に、少なくとも2つ以上の色彩変化発光体30が固定装備されており、かつその位置関係は既知である。
色彩変化発光体30は、各発光体毎に個別の色彩変化パターンで発光している。この色彩変化パターンで、各色彩変化発光体30a、30b、が識別される。エリアセンサカメラ12が2以上の色彩変化発光体30をキャプチャすることによって、それらの画像中の位置を知ることができる。それらの位置関係から、移動体の位置・向きを算出することができる。色彩変化パターンで各色彩変化発光体30a、30bを識別するので、形状に歪みが生じたり等しても、その識別を行うことができる。
(もっと読む)
向き計測装置、向き計測システム、向き計測方法、及び向き計測プログラム
【課題】移動装置が、自装置の方向を正確に測定できること。
【解決手段】位置積分部1162は、位置の変化量を積分して移動ロボット1の位置を示す推定位置情報を推定する。方向積分部1161は、方向の変化量を積分して移動装置の方向を示す推定方向情報を推定する。位置補正部1163は、絶対位置測定装置から受信した位置情報であって時々刻々の移動ロボット1の位置を示す絶対位置情報と、時々刻々の推定位置情報と、を同定して、方向のずれを補正する方向補正値を算出する。方向補正部1164は、方向補正値を用いて、推定方向情報が示す方向を補正する。
(もっと読む)
掃除ロボット及びそれを用いた掃除方法
【目的】軌道を正確に最小分散推定して未清掃の空白領域が無い清掃効率の高い掃除ロボット及び掃除方法を提供する。
【構成】本発明に係る掃除ロボットは、センサの信号を用いてコンピュータにより演算される時々刻々の位置と、前記位置を格納するデータ記憶部と、清掃領域の境界に分散配置された位置情報発信部と、前記位置情報発信部に接近したときに位置情報を受信する位置情報受信部と、受信された前記位置情報により現在位置から最適推定された現在推定位置と、前記現在推定位置を用いて過去位置から最適推定された過去推定位置と、前記現在及び過去の推定位置からなる推定軌道を格納する軌道記憶部と、軌道データから清掃領域内で軌道の無い及び/又は少ない再掃引領域を導出する再掃引領域導出手段と、前記再掃引領域内を走行させて前記再掃引領域を清掃する再掃引領域行走行手段を有することを特徴とする。
(もっと読む)
移動体の位置検出装置及びカメラを用いた移動体の位置検出方法
【課題】高解像度のカメラを用いずに、マークを識別できるようにする
【解決手段】カメラで撮影したマーク候補の画像のスペクトラムデータを作成する(S14)。マーク候補のスペクトラムデータと、予め記憶してある複数のマークの反射光の周波数特性を示すスペクトラムデータと照合し、スペクトラムデータの一致するものを同一のマークと判定する(S16)。2以上のマークの絶対座標を取得し、取得した絶対座標と、2以上のマーク候補の相対位置座標から移動体の位置を計算する(S17)。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
自律移動ロボットシステム
【課題】自律移動ロボットシステムにおいて、簡単な構成により、自律移動ロボットが危険な領域に進入することがなく安全で自律的な移動動作を制限されず移動可能とし、そのような稼働環境を容易かつ低コストで実現可能とする。
【解決手段】システム10は、ロボット1と稼働環境に設置されたマーク2とを備え、ロボット1は、記憶手段5に記憶された情報および制御パラメータに基づいて走行経路を生成する経路生成手段6と、走行経路に沿って移動手段71を制御して自己の位置を移動させる移動制御手段7と、安全確認用のマーク2を検出するためのマーク検出器8とを備え、マークは、ロボット1が安全に移動可能な領域においてのみマーク検出器8によって検出されるようにロボット1の稼働環境に設置されており、移動制御手段7は、マーク検出器8によってマーク2が検出される間は移動を継続し、マーク2が検出されないときは移動を停止して安全を確保する。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
作業車の走行制御装置
【課題】 煩わしさの少ない簡単な作業で作業対象領域における自動操向制御用の設定経路を設定することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報に基づいて車体が作業対象領域内の設定経路に沿って走行するように操向手段を自動的に操作する自動操向制御を実行する制御状態と自動操向制御を実行しない非制御状態とに切り換え自在な自動操向制御手段JSが、非制御状態において経路設定モードに切り換えられると、車体が操向操作具にて操向手段が操作され且つ作業対象領域の周縁部に沿って移動するときのGPS位置情報算出手段100にて求められる複数の車体の位置情報を記憶し且つ記憶された複数の車体の位置情報に基づいて作業対象領域を特定してその特定した作業対象領域に基づいて設定経路を自動設定する経路設定処理を実行する。
(もっと読む)
ランドマーク装置および移動ロボットの制御システム
【課題】広範囲にわたって高い精度での位置制御を可能とするとともに構造的に非常に簡易であるランドマーク装置を提供する。
【解決手段】所定距離を隔てて離間配置されている二つのマークMnを有する近距離用ランドマークセット400と、近距離用ランドマークセット400よりも広い距離を隔てて離間配置されている二つのマークMfを有する遠距離用ランドマークセット500と、を備える。移動ロボット200がランドマーク装置300から遠方に位置している場合には、2点間の距離が離れている遠距離用ランドマークセット500のマークMfを用いてランドマーク装置300と移動ロボット200との距離および方向などの位置認識を行う。移動ロボット200がランドマーク装置300に近づいたときには、近距離用ランドマークセット400のマークMnによって位置認識を行う。
(もっと読む)
自律移動体
【課題】照射範囲を精度良く効率的に推定することが可能な自律移動体、その制御システム、自律移動体の制御などに用いる照射範囲推定方法を提供する。
【解決手段】本発明に係る自律移動体は、移動体本体10と、固有のID信号を含む赤外線を照射する赤外線照射部20から照射された赤外線を検出する検出部10bと、自己位置を推定するための位置情報を取得する自己位置推定手段と、を備えた自律移動体10であって、自律移動体10を移動させて、赤外線を検出可能な赤外線照射部20の照射範囲30を推定する。
(もっと読む)
移動体配置計測システム及び移動体搭載システム
【課題】簡易に移動体の配置を計測することが可能な移動体配置計測システム及び移動体搭載システムを提供する。
【解決手段】自律走行ロボット400に配置された通信装置100が全外周にわたって問い合わせ信号に対応する光を発光すると、当該光を受光した信号発生装置300は、自身の固体番号を含んだ識別信号に対応する光を発光する。そして、この光は、通信装置100によって受光され、当該通信装置100に接続された計測装置200は、問い合わせ信号に対応する光と、識別信号に対応する光のそれぞれの初受光の時間と、識別信号に対応する光の到来方向とに基づいて、自律走行ロボット400の位置及び方位や、自律走行ロボット400からの信号発生装置300の方向を計測する。
(もっと読む)
自律移動体,自律移動体制御システムおよび自律移動体の自己位置推定方法
【課題】周囲の環境に対する自己位置の相対的な位置情報が十分得られない環境においても、簡単に自己位置を精度よく認識することができる自律移動体、自律移動体制御システム、および自律移動体の自己位置推定方法を提供すること。
【解決手段】自律移動体において、移動体本体の自己位置候補を算出する自己位置候補算出部と、前記算出された自己位置候補に基づいて推定自己位置を認識する自己位置認識部と、固有のID信号を含む赤外線を照射する赤外線照射部から照射された赤外線を検出する検出部とを設けるとともに、自己位置認識部において、検出部で検出した赤外線に関する情報に基づいて自己位置候補算出部により算出した自己位置候補を修正し、修正後の自己位置候補を推定自己位置として予め記憶した移動マップ上において認識する。
(もっと読む)
移動体、移動体システム、及びその故障診断方法
【課題】確実に発信機の故障を検出することができる移動体、移動体システム、及び故障診断方法を提供すること。
【解決手段】本発明の一態様にかかる移動体は、環境中に設けられた発信機161から発信された信号に基づいて移動する移動体であって、発信機161から発信された識別情報を含む信号を受信する受信機126と、位置を推定する自己位置推定部111と、地図上での発信機161の位置情報を参照して、推定位置が発信機161からの識別情報を取得可能な取得可能領域にあるか否かを判定する判定部112と、推定位置が取得可能領域にある場合に、受信機126が識別情報を取得できたか否かに応じてカウント動作を行う故障カウンタ113と、故障カウンタ113のカウント値に基づいて発信機161の故障を診断する診断部114と、を備えるものである。
(もっと読む)
自律移動体
【課題】固有のID信号を含む赤外線を検出することにより自己位置を認識可能な自律移動体、およびこのような自律移動体を制御する自律移動体制御システム、およびこのような自律移動体を制御するために用いる位置認識方法において、複雑な設備を用いることなく、その認識する位置精度を向上させること。
【解決手段】移動体本体と、固有のID信号を含む赤外線を照射する赤外線照射部から照射された赤外線を検出する検出部とを備え、検出部で検出した赤外線に関する情報に基づいて自己位置を認識しつつ移動可能な自律移動体において、検出部で検出した赤外線に関する情報に、赤外線の入射方向を特定する情報を含ませることで、照射された赤外線を検出する際に、赤外線照射部に対する移動体本体の相対的な位置を精度よく求めることを可能とする。
(もっと読む)
1 - 20 / 45
[ Back to top ]