
Fターム[5H301GG17]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413) | ジャイロ (272)
Fターム[5H301GG17]に分類される特許
201 - 220 / 272
自走式掃除機

【課題】障害物のある室内を好適に走行して掃除することができる自走式掃除機を実現する。
【解決手段】自走式掃除機100が、居室R内の床面F上を自律走行して掃除を行う際に、超音波センサ25が検知した自走式掃除機100の移動方向前方の障害物を含む壁面を基準壁Wとして認識するとともに、その基準壁Wに向かって右に方向転換を行い、その基準壁Wに沿った一方向を新たな移動方向として移動する。そして、自走式掃除機100は、検知した障害物に対応付けた基準壁Wを避けるように方向転換を行うとともに、その基準壁Wに沿ったジグザグ走行を行うようにして、その基準壁Wに沿った領域を隈無く走行することを繰り返して、床面Fの掃除を行うこととした。
(もっと読む)
隠蔽空間点検システム及び隠蔽空間点検方法

【課題】本発明の目的は、簡易な構成の点検装置により、床下空間や小屋裏空間などの隠蔽空間の点検作業を行うことが可能な隠蔽空間点検システム及び隠蔽空間点検方法を提供することにある。
【解決手段】本発明は、住宅の隠蔽空間Hを点検するための隠蔽空間点検システムSに関する。
隠蔽空間点検システムSは、循環経路を走行しながら、点検に関する各データを取得する点検手段4と、データを管理するデータ管理手段1と、点検手段4と管理手段1との通信を中継するデータ送受信手段2と、を備え、点検手段4には、走行データを取得して、循環経路を確定する最適循環経路決定手段が備えられており、走行データは、データ送受信手段3を介して、データ管理手段1に送信されるとともに、管理手段1に格納され、点検時には、点検手段4は、管理手段1より、走行データを読み込んで、循環経路を走行しながら、点検データを取得する。
(もっと読む)
飼料移動用無人自律走行車
独立した駆動手段によって独立して駆動可能な二つの車輪(4’、5’)と、車両から壁までの距離を測定する距離測定装置(6)と、壁に対する車両のセンターライン(14)の方向を測定する方向測定装置(9)と、車輪間のトルク差を調整するトルク差調整装置(10)と、車両を制御して進行方向へ移動させる制御ユニット(11)と、略横方向に飼料を移動する飼料移動手段(12)とからなる無人自律走行車であって、前記制御ユニット(11)が、走行中車両が距離測定装置によって測定された壁までの距離を維持し、この距離は壁までの予備調整された最小距離以上となっているようにプログラミングされ、前記制御ユニット(11)が、走行中、距離は壁までの予備調整された最小距離以上となっているようにプログラミングされ、前記制御ユニット(11)が、走行中、車両のセンターライン(14)が前記方向測定装置(9)が測定した、少なくとも予備調整した方向とほとんど等しい、壁に対する方向を維持するようにプログラミングされ、前記制御ユニット(11)が、走行中、駆動可能な前記車輪(4’、5’)が前記トルク差調整装置(10)の測定したトルク差を示し、トルクは予備調整された最大トルク以下となっているようにプログラミングされていることを特徴とする無人自律走行車。 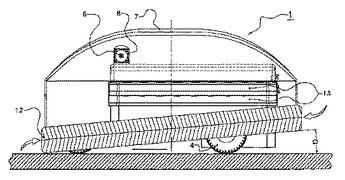 (もっと読む)
(もっと読む)
移動体制御装置及び移動体制御方法
【課題】軽量、小型で、かつ安価なセンサ等を利用して複合航法システムを実現できる移動体制御装置を提供する。
【解決手段】慣性航法データと測位データとに基づいて状態推定フィルタ演算を行い、移動体の位置、姿勢、速度の情報を出力する。このとき、慣性航法データについての状態推定フィルタ演算における、移動体の位置、姿勢、速度の各誤差を演算するにあたり、位置、姿勢、速度の各々を表す状態変数に係り、それよりも要素数の少ない状態変数で特定される微小変化単位四元数として表示された誤差情報を用いて、位置、姿勢、速度の各誤差を演算し、当該誤差情報を乗じることで位置、姿勢、速度の情報が補正され、移動体の制御に供される移動体制御装置である。
(もっと読む)
無人ヘリコプタによるパイロットロープの延線方法
【課題】パイロットロープの延線を円滑かつ安全に行うことができるようにする。
【解決手段】パイロットロープ3が延線されるn本の高圧線鉄塔2について、k番目(k=2,3,・・・,n)の高圧線鉄塔2の上空に、その一端がk−1番目の高圧線鉄塔に固定されているパイロットロープ3の他端を繋いだ、地上局5から無線送信されてくる位置目標値に従ってGPSを利用した自律航行が可能な無人飛行体10を、k番目の高圧線鉄塔2にパイロットロープが掛かるように通過させ、無人飛行体10がk番目の高圧線鉄塔2を通過する際に、パイロットロープ3をk番目の高圧線鉄塔2に固定するとともに、k番目の高圧線鉄塔2に固定されている別のパイロットロープ3に繋ぎ直すことにより、高圧線鉄塔2に順にパイロットロープ3を延線していくようにする。
(もっと読む)
移動体及びその制御方法
【課題】
停止位置の制御を容易に行うことができる移動体、及びその制御方法を提供すること。
【解決手段】
本発明にかかる移動体は、目標位置までの目標経路に対して追従するよう移動制御を行う制御部15が、目標経路に追従して移動する移動体の位置を推定する位置推定部24と、目標位置を含む設定領域Cであって、目標位置を通る分割線Dによって分割領域Aと分割領域Bとに分割されている設定領域Cを設定する領域設定部23とを備え、位置推定部24で推定された推定位置が第1の分割領域から第2の分割領域に遷移した時点で、移動体が目標位置に到達したと判断して移動を停止するのである。
(もっと読む)
移動体及びその制御方法
【課題】
移動をスムーズに行なうことができる移動体、及びその制御方法を提供する。
【解決手段】
本発明にかかる移動体の制御方法は、目標経路に対して追従する移動体の移動をフィードバック制御する制御方法であって、移動体の位置姿勢を推定するステップ(ステップS102)と、推定された推定位置姿勢と前記目標経路とに基づいて、旋回速度を決定するステップ(ステップS103)と、移動体の運動エネルギーが一定となるよう、決定された旋回速度から移動体の直進速度を決定するステップ(ステップS104)と、決定された旋回速度と、決定された直進速度とに基づいて、移動体の駆動機構を制御するステップと、を備えるものである。
(もっと読む)
3次元測定装置及び3次元測定装置を搭載した自律移動装置
【課題】 本発明は、測定目的等に応じて測定条件を変更することができる3次元測定装置を提供することを目的とする。
【解決手段】 本発明の3次元測定装置18は、距離データを測定するレーザレンジセンサ20と、レーザレンジセンサ20を回転させる回転装置30と、回転装置30の回転角を検出するエンコーダ38と、レーザレンジセンサ20とエンコーダ38に接続された演算部52aと、回転周期を設定する設定手段52cと、設定された回転周期で回転装置30を駆動する回転制御部52bとを有する。
(もっと読む)
カメラ雲台付き移動台車
【課題】方位誤差を簡単な構成で迅速に自動補正できるカメラ雲台付き移動台車を提供する。
【解決手段】入力コマンドに基づいて、移動台車の軌道を計算する軌道計算部551と、進行方向を検出したジャイロスコープからの方向データを入力する方向データ入力部513と、移動中であるか否かを判別するステータス判別手段601と、移動中である場合に、入力した方向データで示される進行方向を更新する進行方向更新手段602と、方向データのパラメータを変換する角速度/角度変換手段603と、軌道計算部551で計算された移動方向と、角速度/角度変換手段603で変換された進行方向との差分である誤差を算出する誤差算出手段604と、算出された誤差を打ち消す補正量を算出し、軌道計算部551で計算された移動方向およびカメラ向きの値に重畳する補正量算出手段605とを備える。
(もっと読む)
位置偏差検出装置
【課題】本発明は、磁気検出素子の数を増すことなく、走行経路からの横ズレ量の検出分解能を向上できる位置偏差検出装置を提供することを目的とする。
【解決手段】無人搬送車の前部および後部中心位置にそれぞれ配置され、走行経路16の方向とは直角な左右方向に多数の磁気検出素子14を有する磁気センサ11a,11bと、走行経路16に沿って無人搬送車の両磁気センサ11a,11bにより同時に検出可能な前後位置にそれぞれ配置され、走行経路16に沿って平行な2本の磁気マーカ18A,18Bと、前後の磁気センサ11a,11bの磁気検出素子14によりそれぞれ検出された、2本の磁気マーカ18A,18Bの検出データにより、走行経路16と前方の磁気センサ11aの中心位置との間の横ズレ量および走行経路16と後方の磁気センサ11bの中心位置との間の横ズレ量を演算する制御装置から構成する。
(もっと読む)
移動体システム
【課題】簡単な構成で移動体と目標物との距離を算出し得る自律走行移動体のシステムを提供する。
【解決手段】自律走行移動体1と、該自律走行移動体が向かう目標物13とを備えた移動体システムであって、移動体1は、超音波を送波する第1の送波手段2と、超音波を受波する第1の受波手段3とを有し、目標物は超音波を送波する第2の送波手段8を有し、第1の制御モードにおいては、第1の送波手段2が超音波を送波してから第1の受波手段3が反射波を受波するまでの時間に基づいて障害物90までの距離を算出し、第2の制御モードにおいては、第2の送波手段8が超音波を送波してから第1の受波手段3が該超音波を受波するまでの時間に基づいて目標物13までの距離を算出する。
(もっと読む)
自律走行ロボットの経路計画方法及び自律走行ロボット
【課題】安価な計算手段を用いて実現することができ、走行経路を効率良く計画することが可能な自律走行ロボットの経路計画方法を提供する。
【解決手段】通行禁止領域及び分岐領域を除外して、作業領域全体を櫛型走行のみにより確実にカバーし得るサブ領域に分割し、サブ領域毎に櫛形走行を行っているので、単純なルールの櫛形走行であっても、自律走行ロボット1を確実に計画通りに走行させることができる。この様な単純なルールの櫛形走行は、センサの数が制限されても、またある程度の自己位置の誤差があっても実現することが可能である。
(もっと読む)
自走式掃除機
【課題】未掃除領域を残すことなく効率よく掃除することが可能な自走式掃除機を提供する。
【解決手段】全体的往復掃除を行った後に、壁際走行を行う。壁際走行を行う際には、全体的往復掃除における未掃除エリアが探索し、未掃除エリアが探索された場合には当該未掃除エリアについて部分的に往復掃除を実行する。室内を少なくとも1周するまで、壁際走行を行わせることにより、効率よく、漏れのない掃除を実現させることができる。
(もっと読む)
倒立車輪型の走行体
【課題】 倒立車輪型の走行体において、車体を後方に大きく傾斜させないでも急制動することが可能な技術を提供する。
【解決手段】 本発明の倒立車輪型の走行体は、一対の車輪と、一対の車輪を同軸上で回転可能に支持する車台と、車台に対して車輪を回転させる車輪用アクチュエータと、車台に支持されている車体と、車台を倒立させるように、車輪用アクチュエータを制御する倒立制御装置とを備える倒立車輪型の走行体である。その走行体では、車体は車台に対して走行体の進行方向に関して相対的に移動可能に車台に支持されている。その走行体は、車台に対して車体を走行体の進行方向に関して相対的に移動させる姿勢用アクチュエータと、進行している走行体の制動を開始する際に車台に対して車体を走行体の進行方向の逆方向に移動させるように姿勢用アクチュエータを制御する制動姿勢制御装置を備えている。
(もっと読む)
自律移動装置
【課題】実使用環境においてアレイ応答ベクトルをキャリブレーションすることにより、実使用環境での位置の検出精度を高めることができる自律移動装置を提供する。
【解決手段】電波発信器は絶対座標系における位置が既知であって電波を送信する。アンテナ21は3台以上の電波発信器からの電波を受信し、到来方位推定部23においてアレイ応答ベクトルに相当するパラメータをパラメータ格納部26に照合することにより電波の到来方位を推定する。測位処理部25は電波発信器の既知の位置と電波の到来方位とを用いて自己位置を求める。キャリブレーション動作では、アンテナ21が電波発信器に対して規定の位置関係である状態で、レーザレーダ5により実測した電波発信器の方位とアンテナ21から出力されているアレイ応答ベクトルに相当するパラメータとを対応付けてパラメータ格納部に書き込む。
(もっと読む)
自律移動装置
【課題】自律移動装置において、スリップの影響やバックラッシなどの影響を抑制してより精度よく自律移動装置本体の角速度を算出し、自己位置推定の精度向上を図る。
【解決手段】一対の駆動輪2と、各駆動輪2を駆動する一対の回転モータ3と、各モータ3の回転量に基く回転信号を出力する一対のエンコーダ4と、各エンコーダ4からの回転信号に基づき装置本体の角速度を算出する角速度算出部5と、装置本体の角速度を直接取得するジャイロ6と、角速度算出部5により算出された角速度ωmとジャイロ6から得られた角速度ωgとを用いて自己位置を推定してモータ3の回転を制御することにより装置本体の走行制御を行う走行制御部10とを備える。走行制御部10は、角速度算出部5により算出された角速度ωmとジャイロ6からの角速度ωgとの差が閾値ωthよりも大きいとき角速度ωgを用い、そうでないとき、角速度ωmを用いて自己位置を推定する。
(もっと読む)
自動掃除システム
【課題】より好適に所定範囲内の掃除を行うことができる自動掃除システムを実現する。
【解決手段】仮想壁形成装置10と自走式掃除機100を備える自動掃除システムにおいて、仮想壁形成装置10は、所定の超音波を出力して仮想壁Wを形成する。自走式掃除機100は、仮想壁Wを検出するとともに、その仮想壁Wに基づく仮想線Lを設定することができる。そして、自走式掃除機100は、仮想壁Wや仮想線Lを越えて移動することができないので、仮想壁Wや仮想線Lが対応付けられた境界線により定められた所定範囲内に閉じ込められるようにして、その範囲内の掃除を行うようになっている。
(もっと読む)
自走式掃除機
【課題】ランダムに走行しながら作業を行う自走式掃除機において、障害物をより好適に回避することにより、効率の良い作業を行うことのできる自走式掃除機を提供する。
【解決手段】自走式掃除機100において、回転方向決定手段(CPU81、回転方向決定プログラム83c等)により、自走式掃除機100の走行方向と略一致する方向に存する障害物が検出された場合に回転方向をランダムに決定し、自走式掃除機100の中心点Pを通る走行方向線Tに対して左側に存する障害物が検出された場合に回転方向を時計回り方向に決定し、自走式掃除機100の中心点Pを通る走行方向線Tに対して右側に存する障害物が検出された場合に回転方向を反時計回り方向に決定するとともに、回転角度決定手段(CPU81、回転角度決定プログラム83d等)により、自走式掃除機100の回転角度をランダムに決定する。
(もっと読む)
二輪移動台車
【課題】二輪移動台車において、姿勢制御の下、安定した姿勢で障害物を乗り越える。
【解決手段】段差乗り越え動作において、二輪移動台車は、錘部材20を例えば駆動輪2aの方向に移動させ、駆動輪2bに先に段差100を乗り越えさせる。駆動輪2bが段差100を乗り越えた後、二輪移動台車は、錘部材20を駆動輪2bの方向に移動させ、駆動輪2bに段差100を乗り越えさせる。このように駆動輪に段差を片輪ずつ乗り越えさせるため、駆動輪2a、2bの片輪ずつにトルクが加えられる。また、一方の駆動輪が段差を乗り越えるとき、他方の駆動輪の方向に車体の重心が移動される。このため、障害物を乗り越える駆動輪は、より小さなトルクにより障害物を乗り越えることができる。従って、駆動輪に加えるトルクによる反作用の影響が少なくなり、車体の姿勢が大きく乱されることを避けることができる。
(もっと読む)
水中航走体の航路制御方法
【課題】水中航走体の姿勢を制御する水平スラスタおよび垂直スラスタの動力の省エネルギー化を図ることができる水中航走体の航路制御方法を提供すること。
【解決手段】機体2の左右方向に延びる水平軸線に沿って配置された水平スラスタ7を備えるとともに、予め定められた経路の上を航走するた水中航走体1であって、潮流の影響を受けて、針路と機体方位との間に差が生じ、この針路と機体方位とのなす角度が所定角度以下の場合には、前記水平スラスタが作動しないように構成されている。
(もっと読む)
201 - 220 / 272
[ Back to top ]