
Fターム[5H301GG17]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413) | ジャイロ (272)
Fターム[5H301GG17]に分類される特許
141 - 160 / 272
自律移動装置

【課題】作業用の自律移動装置において、簡単な構成により、ユーザの思惑に違わない作業結果を実現可能とする。
【解決手段】自律移動装置1は、作業エリアと作業内容とに関するユーザからの作業指示に基づいて作業エリアまで自律的に移動して作業を行うため自己の各部を制御する制御手段2と、ユーザからの作業指示を受け取ると共にユーザに応答を表示する操作インターフェイス3とを備え、制御手段2は、操作インターフェイス3を介して作業指示が入力されると、作業エリアまでの移動時間とその作業エリアにおける作業時間とを見積もることにより作業指示に関する作業の遂行に必要な所要時間を推定し、その推定結果を操作インターフェイス3を介してユーザに提示する。制御手段2は、作業の遂行に必要な所要電力量を見積もり、電池残量検知手段4によって検知された電池10の残電力量と比較し、その比較結果をユーザに提示する。
(もっと読む)
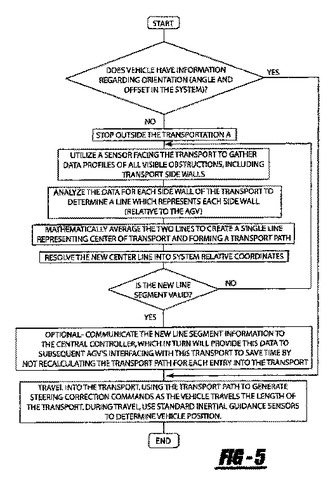
搬送体の自動積荷システム及び積荷方法
搬送体の自動的な積荷及び除荷のための方法及びシステムが開示される。第1の案内システムは、搬送体近傍の位置へ向かう走行路に従い、次いでセンサが搬送体を検出してデータを作成する。それによって、搬送路が決定され、自動案内車両が該搬送路に沿って搬送体へと移動して物品を引渡す。又、物品の引渡し、ならびに配置の後に、該自動案内車両は搬送体から出る。
 (もっと読む)
(もっと読む)
地図情報作成装置及びそれを備えた自律移動装置

【課題】自律移動装置に備えられる地図情報作成装置において、精度の良い地図情報を作成する。
【解決手段】地図情報作成装置1は、周囲の環境を認識して周囲情報を取得する環境認識部2と、環境認識部2が取得した周囲情報に基づいて地図情報を作成する地図情報作成部3と、自己の位置及び向きを変化させる駆動装置4と、地図情報作成部3が作成した地図情報に基づいて駆動装置4の動作を制御する制御部5と、地図情報を記憶する記憶部6と、地図情報と周囲情報とを照合して自己の位置情報を取得する位置認識部7と、を備える。地図情報作成部3は、地図情報と周囲情報とを照合した結果、位置情報の取得には使用されなかった周囲情報を基にして地図情報を更新するので、地図情報作成装置1は、自律的に移動しながら精度の良い地図情報を作成することができる。
(もっと読む)
倒立車輪型の走行体
【課題】 倒立車輪型の走行体において、車体を後方に大きく傾斜させないでも急制動することが可能な技術を提供する。
【解決手段】 本発明の倒立車輪型の走行体は、一対の車輪と、一対の車輪を同軸上で回転可能に支持する車台と、車台に対して車輪を回転させる車輪用アクチュエータと、車台に支持されている車体と、車台を倒立させるように、車輪用アクチュエータを制御する倒立制御装置とを備える倒立車輪型の走行体である。その走行体では、車体は車台に対して走行体の進行方向に関して相対的に移動可能に車台に支持されている。その走行体は、車台に対して車体を走行体の進行方向に関して相対的に移動させる姿勢用アクチュエータと、進行している走行体の制動を開始する際に車台に対して車体を走行体の進行方向の逆方向に移動させるように姿勢用アクチュエータを制御する制動姿勢制御装置を備えている。
(もっと読む)
車両制御方法およびシステム
本発明は、マイクロ波周波数帯域において送信する送信機を準備する工程と、車両上に受信手段を準備する工程と、信号を受信する工程と、車両に対する送信機の方位角を算出する工程とを含み、算出された方位角に基づいて車両が制御される、車両制御システムおよび方法を提供する。  (もっと読む)
(もっと読む)
移動体及び移動体の走行方法
【課題】 制御性が良い走行軌道をオンボードで生成することによって、移動体の制御がスムーズになり高精度の走行を可能とすると共に、あらかじめ地図や軌道作成などの付帯作業の必要がなく、安価で応用性が高い移動体を提供する。
【解決手段】 移動した移動軌跡を記憶する記憶手段と、前記記憶手段に記憶された移動軌跡を編集して自走行軌道を生成する走行軌道生成手段と、前記走行軌道生成手段により生成された自走行軌道に基づいて走行する走行手段と、前記走行手段により実際に走行した軌道である自走行軌跡と、前記走行軌道生成手段により生成された自走行軌道とに基づいて、前記自走行軌跡と前記自走行軌道との誤差が少なくなるように、前記走行手段に補正値を与える走行誤差補正手段とを備える。
(もっと読む)
自律移動体の経路設定装置
【課題】 自律移動体には、視野からはずれる物体に適切に対応し、この物体との衝突を避ける経路設定を行うことが求められている。
【解決手段】 経路設定装置は、対象となる視野から物体を検出し、その位置を計測する機能を有するセンサ装置および自律移動体の動きを制御する電子制御ユニットとを備え、この電子制御ユニットは、前記センサ装置から得られる複数の計測サイクルにわたる前記物体の位置の変化に基づいて、該物体の速度および移動方向を求める機能と、前記物体の位置、速度および移動方向に基づいて、該物体との接触を回避して前記自律移動体の経路を設定する機能と、前回の計測サイクルで認識された物体が今回の計測サイクルで認識されないとき、該物体の速度を所定値以下の値に設定して前記自律移動体の経路を設定する機能と、を実現するようプログラムされている。
(もっと読む)
自律移動体のための物体認識装置
【課題】自律移動体のための物体認識装置を提供する。
【解決手段】物体認識装置は、対象となる視野から障害物を検出し、その位置を計測する機能を有するセンサ装置および前記自律移動体の動きを制御する電子制御ユニットを備える。電子制御ユニットは、センサ装置から得られる複数の計測サイクルにわたる障害物の位置の変化に基づいて、該障害物の速度および移動方向を求める機能と、前記障害物の静止を判定する機能と、前記障害物の位置の今回計測値がそれまでに得られた前記移動方向から所定の角度を超える方向にあるとき、または前記静止を判定する機能で静止と判定されたとき、前記障害物が行動を変更したことを検出する機能と、前記障害物の行動の変更が検出されることに応じて、該行動の変更が検出された位置を起点として、新たに該障害物の速度または移動方向を算出する機能と、を実現するようプログラムされている。
(もっと読む)
水中航走体運動制御装置および水中航走体
【課題】水中航走体が巡航する高度を制御するときにその水中航走体本体の姿勢の変動を低減すること。
【解決手段】水底29のうちの第1点24から水中航走体本体2までの第1距離25と水底29のうちの第1点24と異なる第2点27から水中航走体本体2までの第2距離28とを測定する高度収集部15と、第1距離25と第2距離28とに基づいて、水中航走体本体2が進行する進行方向32の鉛直方向の成分を変更する舵5を制御する舵制御部16とを備えている。このような水中航走体運動制御装置は、水中航走体1が巡航する高度を制御するときに、水底29のうちの1点から距離を1つだけ測定して制御することに比較して、その水中航走体1の姿勢角と高度偏差の変動を低減することができる。
(もっと読む)
移動ロボット、自己位置補正方法および自己位置補正プログラム
【課題】演算量の増加を抑えつつ、正確に自己位置を推定することのできる移動ロボットを提供する。
【解決手段】自律移動可能な移動ロボット1であって、自己位置を推定する自己位置推定部16と、移動ロボット1が移動可能な領域を点集合データで示す環境地図を保持する環境地図保持部181と、移動ロボット1の周囲の移動可能な領域を検知する経路センサ17と、経路センサ17による検出結果を点集合データで示す周囲環境情報を生成する周囲環境情報生成部184と、環境地図中の対応点データの候補を、周囲環境情報中の所定の点データを基準として予め定められた閾値以下の距離の領域に存在する点データに限定する検索対象点限定部186と、限定された点を所定の点データに対する対応点データとして、環境地図中の各点データと、周囲環境情報中の対応点データとの間の位置ずれ量分自己位置を補正する位置補正部188とを備えた。
(もっと読む)
移動ロボット、自己位置補正方法および自己位置補正プログラム
【課題】演算量の増加を抑えつつ、正確に自己位置を推定することのできる移動ロボットを提供する。
【解決手段】自律移動可能な移動ロボット1であって、自己位置を推定する自己位置推定部16と、移動ロボットが移動可能な領域を点集合データで示す環境地図を保持する環境地図保持部181と、当該移動ロボット1の現在位置において移動ロボットの周囲の移動可能な領域を検知する経路センサ17と、経路センサ17による検出結果を点集合データで示す周囲環境情報を生成する周囲環境情報生成部184と、環境地図から、自己位置において経路センサ17により検出不可能な領域の点データを除去する不要点除去部183と、不要点除去部183により点データが除去された後の環境地図中の各点データと、周囲環境情報中の対応点データとの間の位置ずれ量分自己位置を補正する位置補正部188とを備えた。
(もっと読む)
自律走行装置およびこの装置を機能させるためのプログラム
【課題】複数の障害物が乱雑に置かれているような場所において、同じ場所で反転往復移動を繰り返し特定の場所から抜け出すことができなくなった場合を改善する自律走行装置を提供する。
【解決手段】障害物の有無または距離を検知する障害物検知手段2と、本体1を移動走行させる走行手段7と、障害物検知手段2からの障害物情報により走行手段7を制御して本体の進行方向を変更する制御手段5とを備え、制御手段5は、移動領域内を往復移動させる往復移動モードを有し、この往復移動モード中に、移動領域内に置かれた障害物によって移動不能状態になったと判断すると、移動不能領域から抜け出る障害物回避動作モードに変更することで、繰り返し動作で往復移動が進行せず、また終了しないことを改善する。
(もっと読む)
車輪半径推定装置
【課題】乗員や積載物等の重量等により変化する車輪半径を推定する。
【解決手段】倒立振り子の姿勢制御を利用した車両を対象とする。本実施形態では、車輪の角速度を検出する車輪角速度センサと、車両の旋回方向の動きを検出するヨーレイトセンサを配置し、両センサの検出値を、数式1に代入することで、タイヤ半径rを算出(推定)する。Y=(ωR−ωL)r/W…(数式1)
(もっと読む)
自律移動体および移動方法
【課題】自律移動体の現在位置の推定精度を向上させること。
【解決手段】自律移動体10は、カルマンフィルタを用いて下位センサの検出値から自律移動体10の期待値および分散を推定し、自律移動体10の状態変化量の確率分布の上限および下限を設定し、環境測定により推定した各パーティクルにおける自律移動体10の状態変化の信頼度に基づいて、自律移動体10の状態変化の確率分布の上限および下限を算出し、自律移動体10の状態毎に各上限および下限を統合し、統合した上限および下限に基づいて、自律移動体10の状態変化量の確率分布を算出し、環境計測により推定した各パーティクルにおける自律移動体10の状態変化の信頼度を、算出した確率分布に基づいて修正する。
(もっと読む)
倒立振子型移動体、及びその制御方法
【課題】安定して走行可能な倒立振子型移動体、及びその制御方法を提供する。
【解決手段】本発明にかかる倒立振子型移動体は、車輪を回転可能に支持する車台16と、駆動輪18、20と、車輪を回転駆動するモータ34、36と、ロッド26を介して車台16に対して回動可能に支持された車体12と、車輪の車軸に対する車体12の重心位置に応じて変化する変化量を測定するジャイロセンサ48と、車体12を駆動して、車軸の位置に対する車体12の重心位置を変化させる姿勢制御用アクチュエータ40と、車体12の変化量がしきい値を越えた場合に、車体12の傾斜角速度を低減させるに姿勢制御用アクチュエータ40を駆動する制御部80と、を備えるものである。
(もっと読む)
エッジ検出を用いたロボット掃除機及びその制御方法
【課題】掃除しようとする区域のエッジでロボット掃除機が回転した角度及びエッジの個数を用いて掃除完了可否を判断することで、与えられた掃除区域をより効率的に掃除することができるロボット掃除機及びその制御方法を提供する。
【解決手段】与えられた掃除区域を走行しながら掃除をするロボット掃除機の制御方法において、前記ロボット掃除機の走行経路に障害物があるかどうかを検出し、障害物が検出された場合、前記障害物がエッジであるかどうかを判断し、前記検出された障害物がエッジであると判断される場合、エッジを基準にして所定領域を掃除することを特徴とするロボット掃除機の制御方法を構成する。
(もっと読む)
無人搬送車
【課題】カーブ周辺に障害物が設けられ走行スペースに制約がある場合でも、障害物と車体との接触を回避することができる無人搬送車を提供すること。
【解決手段】無人搬送車1によれば、慣性航法装置78により算出された車体2の位置座標に基づいて、その車体2の位置座標において操舵すべき操舵角となるように各駆動輪3LF,3LR,3RF,3RRをそれぞれ個別に操舵することができる。よって、カーブ入口側や出口側に障害物O1,O2が設けられ走行スペースに制約がある場合でも、カーブ走行中における車体2の姿勢を考慮し、車体2が走行スペースからはみ出さないように各駆動輪3LF,3LR,3RF,3RRの操舵角をそれぞれ設定しておくことで、障害物O1,O2と車体2との接触を回避することができる。
(もっと読む)
人工衛星の姿勢制御装置
【課題】 ホイールやスラスタの故障等によりホイール、スラスタとも2個しか機能しない場合、ホイールとスラスタの姿勢制御機能は各々独立しているため、三軸トルクを出力できず、人工衛星の姿勢制御を維持することができない。
【解決手段】 トルク出力軸の異なる2個のホイールと、ホイールの各トルク出力軸に対する直交軸方向にトルク成分をもつ少なくとも2個のスラスタと、姿勢角度と姿勢角速度より得たトルクコマンドから直交軸成分のコマンドとトルク出力軸成分のコマンドを出力するホイール基準面座標変換部と、直交軸成分のコマンドよりスラスタへ駆動コマンドを出力し、かつスラスタにより発生させるトルクのうちトルク出力軸への射影成分に対する打消コマンドを出力するスラスタ駆動演算部と、トルク出力軸成分のコマンドと打消コマンドよりホイールへ駆動コマンドを出力するホイール駆動演算部を備える。
(もっと読む)
自走式装置
【課題】装置本体部に対して斜め後方から衝撃が加わった際に、障害物の検知を適正に行う。
【解決手段】所定の室内の床面上を自立走行するセキュリティロボットであって、上側カバー部に設けられた左右の側方カバー部材を有し、装置本体部に側方から加わる衝撃を緩衝する側方衝撃緩衝部と、側方カバー部材と障害物の接触に基づいて、障害物を検知する障害物検知センサとを備え、障害物検知センサは、側方カバー部材に取り付けられ、障害物の検知状態を切り替える検知状態切替部材30を備え、さらに、側方カバー部材に斜め後方から斜めに衝撃が加わった場合に、障害物検知センサによる障害物の検知状態を切り替えるように検知状態切替部材の移動を案内する突状軸部195及び挿通孔部187並びに突片部196及び接触面部1862bを備える。
(もっと読む)
自律移動装置群制御システム
【課題】自律移動装置群制御システムにおいて、簡単な構成により、搬送業務の忙しい場所へは多くの自律移動装置を移動させ、かつ、搬送能力の低下につながる自律移動装置の一所への密集を回避して自律移動装置の有効活用と効率的な搬送を可能とする。
【解決手段】制御システム1は、領域Aにおける複数の機器2に物品の供給や回収をする複数の自律移動装置3と、自律移動装置3に動作指示する中央制御装置4とを備える。領域Aは複数のサブ領域SA1などで構成される。中央制御装置4は目標機器に自律移動装置3を指定する動作指示部と、サブ領域内の自律移動装置3の台数を取得する装置台数取得部と、サブ領域に存在可能な自律移動装置3の最大台数Mxを記憶する記憶部とを備える。動作指示部は、自律移動装置3の台数と最大台数Mxとを比較し、サブ領域に台数増が可能な場合に自律移動装置3に動作を指示し、密集を回避して効率的搬送を可能とする。
(もっと読む)
141 - 160 / 272
[ Back to top ]