
Fターム[5H301GG17]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413) | ジャイロ (272)
Fターム[5H301GG17]に分類される特許
121 - 140 / 272
人工衛星用姿勢制御装置および人工衛星の姿勢制御方法

【課題】 人工衛星の姿勢制御用アクチュエータであるCMG(コントロールモーメントジャイロ)は、大トルクを出力できる反面、トルク分解能やトルク出力誤差が大きくなってしまうという欠点があった。
【解決手段】 オープンループでのトルク出力が可能なCMG駆動演算部と、CMGのジンバル角に応じてCMG内部のRW(リアクションホイール)にトルク分配するRW駆動制御部を備え、人工衛星のマヌーバ時と非マヌーバ時とで、CMGによるオープンループ制御モードとRWによるクローズドループ制御モードとの切り替えを行う。
(もっと読む)
移動ロボットの走行領域判別装置及び走行領域判別方法

【課題】簡単な条件設定のみで移動ロボットの前方領域を走行可能領域及び走行不能領域に区分けする走行領域判定装置及び走行領域判定方法を提供する。
【解決手段】レーザレンジファインダ11と、これで得たセンサ座標系データを直交座標系データへ変換するバーチカルジャイロ13を具備した外界計測部10と、事前データメモリ30a内の事前データと上記形状データの幾何的な特徴量とから、移動ロボットRの前方側を走行可能領域及び走行不能領域に区分けする処理部30を備え、事前データは、計測用車両の走行で得た形状データの幾何的な特徴量と、形状データをマッピングした2次元地図上で分類された走行可能領域及び走行不能領域の分類結果とから成り、処理部30では、外界計測部10で得た形状データの幾何的な特徴量に対して、事前データを教師データとする分類器を適用して、移動ロボットRの前方側を走行可能領域及び走行不能領域に区分けする。
(もっと読む)
自律走行装置およびプログラム
【課題】本体が障害物の狭間を通過することを試みることができ、狭い場所に入り込んだ場合には脱出を容易にすることが可能な自律走行装置およびプログラムを提供すること。
【解決手段】本体1を移動させる走行手段3と、本体1の前進方向に対して障害物12が左右のどちら側にあるか判別し障害物12までの離間距離を測定できる複数の障害物検知手段6と、複数の障害物検知手段6の信号に基づいて走行手段3を制御して本体1を移動させる移動制御手段21とを備え、障害物検知手段6で検知する障害物12までの検知距離が接近限界距離以下になると停止制御することを特徴としている。
(もっと読む)
移動体、及び車両用警告装置
【課題】障害物との衝突を適切に回避すると共に、自己の移動によって周囲に戸惑いを感じさせないように配慮した移動体等を提供すること。
【解決手段】周辺に存在する移動障害物の位置及び向きを検知する検知手段(10、31、32)と、前記検知手段により検知された移動障害物の位置から見て当該移動障害物の向きに相当する部分が広くなるように進入不可領域を設定する進入不可領域設定手段(36)と、を備え、前記進入不可領域設定手段により設定された進入不可領域への進入を回避するように移動することを特徴とする移動体(1)。
(もっと読む)
ロボットおよびタスク実行システム
【課題】複数のロボットのそれぞれによりタスクが円滑に実行されうるように、他のロボットに搭載されている複数のアクティブセンサの相互干渉を回避することができるロボット等を提供する。
【解決手段】複数のロボットRのそれぞれに搭載されているアクティブセンサが相互に干渉する可能性があり、かつ、自己ロボットRにより実行されているタスクに対する当該アクティブセンサの寄与度が、他のロボットRにより実行されているタスクに対する当該アクティブセンサの寄与度よりも低い状況において、自己ロボットRの当該アクティブセンサの感度が下げられる。タスクへの寄与度が比較的低いアクティブセンサの感度が下げられることにより、アクティブセンサの相互干渉が回避され、かつ、ロボットRによる当該タスクに支障が生じる事態が回避されうる。
(もっと読む)
移動装置およびその制御プログラム
【課題】さまざまな状況に応じて移動物体との接触を流動的に回避しながら自律的に移動または行動しうる移動装置等を提供する。
【解決手段】第1目標軌道R1が探索されえない等、第2安全条件が満たされていない場合、第1空間要素Q1を要素通行領域QSの境界に近づける第2目標軌道が探索される。暫定的な目標軌道としての第2目標軌道にしたがってロボットが通行可能領域の境界に自律的に近づき、第2目標軌道の終点に相当する位置において停止する。ロボットが第2目標軌道にしたがって移動した分だけスペースが広がるので、このスペースを通じた物体の移動を促すことができる。
(もっと読む)
移動装置および移動装置システム
【課題】サーバによって移動装置の行動が管理されていない環境下で、相互の接触を回避しながら自律的に移動または行動しうる移動装置等を提供する。
【解決手段】第1移動装置としてのロボット1において(1)物体が第2移動装置に該当することが認識され、(2)この認識結果に基づいて目標軌道R0(=第2目標軌道R2)が探索される。また、(3)第1移動装置が目標軌道R0のうち一部または全部を第2移動装置としての他のロボット1に認識させる。さらに、第2移動装置において、(4)第1移動装置の目標軌道R0のうち一部または全部が認識され、(5)この認識結果に基づいて第2移動装置がしたがう目標軌道R0が探索される。そして、各移動装置がそれぞれの目標軌道R0にしたがって相互に接触を回避するように移動することができる。
(もっと読む)
移動経路作成方法、自律移動体及び自律移動体制御システム
【課題】自律移動体が移動速度を変更することなく滑らかに移動できる移動経路を作成可能な移動経路作成方法、自律移動体及び自律移動体制御システムを提供することを目的とする。
【解決手段】本発明に係る移動経路作成方法は、移動領域内に存在する移動始点Sから移動終点Gに到達する自律移動体10の移動経路を作成する移動経路作成方法であって、自律移動体10の移動が妨げられる移動禁止領域FRを設定するステップと、移動禁止領域FRを回避するように自律移動体10の移動経路Rを作成するステップと、を備え、移動禁止領域FRは、移動禁止領域FRの重心Pから自律移動体10の移動方向Dに距離が離れるに従って、移動方向Dに直交する方向における移動禁止領域FRの幅が小さくなるように設定するものである。
(もっと読む)
自走式機器およびそのプログラム
【課題】機器本体が繰り返し状態に陥ることなく先に進めるようにした賢い自走式機器を提供することを目的とする。
【解決手段】機器本体100が障害物として検出している壁面に沿うように移動する場合において、位置記憶手段105に記憶している過去の位置から現在の位置までの移動軌跡が閉じた状態になった時に、壁面に対して機器本体100が外回りまたは内回りに移動したかにより機器本体100の動作の切替え判断を行うようにした。これによって、機器本体100が壁面に沿って移動する場合、繰り返し走行を検出し、同時に移動軌跡から外回りであるか内回りであるかを判断することによって、状況に合わせて適切な回避動作を実行する。このため機器本体100が繰り返し状態に陥ることを効率的に回避し、先に進んで部屋などの大きさを見積もることや、隅の清掃を行うことができる。
(もっと読む)
飼料移動のための無人走行車両
地面に置かれた飼料(3)を水平に移動させるための無人走行車輌(1)は、別々の駆動手段により別々に駆動される二つの車輪と、その車輌から壁部への距離を測定する距離測定手段(6)と、その壁部に対する車輌の中心線の向きを測定する向き測定手段(9)と、車輪間のトルク差を測定するトルク差測定手段(10)と、その車輌を走行方向に移動するよう制御する制御装置(11)と飼料(3)を水平に移動させる飼料移動手段と、を備え、前記制御装置(11)が、動作中に前記距離測定手段(6)により測定された壁部までの距離を、初期設定の最小距離以上に維持するようプログラムされ、さらに、飼料移動手段の最下点(19)の高さと又は位置を調整する調整装置を備えている。 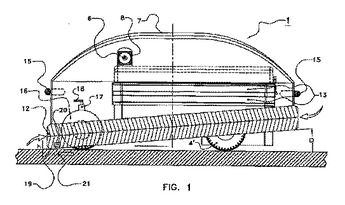 (もっと読む)
(もっと読む)
倒立車輪型移動体、及びその制御方法
【課題】操作性を向上することができる倒立車両型移動体、及びその制御方法を提供する。
【解決手段】本発明の一態様にかかる倒立車輪型移動体は、右駆動輪18、左駆動輪20を回転駆動するモータ34、36と、スイングアーム17、19を介してマウント26、28に対して回動可能に支持された搭乗席74と、搭乗席74を駆動する搭乗席駆動モータ70と、を備えている。制御部80は、モータ34、36とともに搭乗席駆動モータ70を駆動させる第1の制御モードと、搭乗席駆動モータ70の駆動を停止し、モータ34、36を駆動させる第2の制御モードと、を切換えることができる。
(もっと読む)
自律走行装置およびプログラム
【課題】方向転換を精度良く行い、未通過領域の発生を抑え、移動領域の全てを隈無く移動することを可能にした自律走行装置を提供する。
【解決手段】装置本体1と、障害物の有無または距離を検知する障害物検知手段2と、装置本体1の移動方向を検知する方向検知手段3と、装置本体1を移動走行させる走行手段7と、前記各手段の出力を受けて走行手段7を制御する制御手段5とを有し、制御手段5は方向検知手段3の出力補正モードを有するものである。これによって、壁などの移動領域内の物を利用し装置本体1の動作時に方向検知手段3の出力の補正ができ、方向転換を精度良く行い、未通過領域の発生を抑え、移動領域の全てを隈無く移動することを可能にした。
(もっと読む)
点検システム、移動体、操作装置、及び点検プログラム
【課題】建築物の閉空間を点検する場合に、移動体の進行方向を積算によって得ることで生じる累積誤差を精度良く補正可能な点検システムを提供する。
【解決手段】床下点検システムは、移動体のヨー角方向における角速度Δγを積算することによって移動体の進行方向を検出する方向検出部310と、閉空間内の天井に存在する部材である天井部材(例えば、大引/根太)を検出する天井部材検出部と、天井部材検出部による検出結果を用いて、進行方向検出部310が角速度Δγを積算することによって生じる累積誤差を補正する誤差補正部320とを備える。
(もっと読む)
自走式装置およびプログラム
【課題】障害物への衝突回避と障害物際までの作業エリア効率をトレードオフした、作業環境にあわせた最適な作業を行うことができる自走式装置を提供することを目的とする。
【解決手段】走行手段23および操舵手段24と、障害物検知手段22と、衝突検知手段9と、障害物検知手段22が障害物を検知した場合、または衝突検知手段9により障害物に衝突したことを検知した場合に本体の移動を制御する制御手段21と、障害物を検知した場合に本体が障害物の手前で停止する接近限界距離を決定する障害物接近限界距離決定手段30とを備え、接近限界距離は衝突検知手段9による障害物の衝突回数を反映して決定するようにした。これによって、障害物の衝突回数を反映して接近限界距離を大小に変動させることができ、障害物への衝突回避と障害物際までの作業エリア効率をトレードオフした作業環境にあった最適な作業を行うことができる。
(もっと読む)
自走式装置およびプログラム
【課題】障害物への衝突回避と、作業時間効率をトレードオフした、作業環境にあわせた最適な作業を行うことができる自走式装置を提供することを目的とする。
【解決手段】走行手段23および操舵手段24と、障害物検知手段22と、衝突検知手段9と、障害物検知手段22が障害物を検知した場合、または衝突検知手段9により障害物に衝突したことを検知した場合に本体の移動を制御する制御手段21と、衝突検知手段9による障害物の衝突回数を反映して本体の走行速度を決定する走行速度決定手段30を備えている。これによって、障害物の衝突回数を反映して本体の走行速度を変動させることができ、作業効率を上げて作業環境にあった最適な作業を行うことができる。
(もっと読む)
床下点検システム、操作装置及び床下点検プログラム
【課題】床下移動体に搭載された撮像装置によって撮像された撮像対象物の位置をユーザが確認可能とする。
【解決手段】床下点検方法は、床下空間内における移動体の所在位置を検出する検出ステップS103と、床下空間の平面図を表示するとともに、検出された所在位置を平面図上に表示する表示ステップS103と、表示される平面図上で、撮像装置が撮像する撮像対象物の位置を指定する指定操作をユーザから受付ける受付けステップS105、ステップS106と、指定操作を受付けた場合、撮像装置によって得られた画像データと、指定操作によって指定された位置を示す撮像位置情報とを関連付けて保存する保存ステップS112とを備える。
(もっと読む)
自律移動装置
【課題】自律移動装置において、壁などの既知の物体へは通常設定される離間距離より接近して作業をすることを可能とし、人や未知の障害物へは所定の離間距離を保って移動することを可能とする。
【解決手段】自律移動装置10において、自己の位置情報を取得し、目標地点まで移動するよう制御する。環境情報取得手段12が検出した障害物候補が、地図情報141に含まれると判断される場合は、移動制御手段17は、自己の周囲に設定されている第1の領域に障害物侯補が入らないように移動手段13を制御し、障害物候補が地図情報141に含まれないと判断される場合は、自己の周囲の第1の領域よりも広い第2の領域に障害物候補が入らないように制御する。これにより、例えば、自律移動装置が掃除などの作業をする場合、壁などには接近して作業をすることが可能となり、人や一時的に置かれた障害物には広めの距離を保って移動することが可能となる。
(もっと読む)
移動ロボット制御装置
【課題】動作パターンを限定したり一旦停止したりすることなく、シームレスな動作によって位置決め精度を向上する移動ロボット制御装置を提供する。
【解決手段】直交座標系の速度指令を生成する速度指令生成部11と、直交座標系の速度指令を各駆動軸の速度指令に変換する逆運動学変換部12とを備えた移動ロボット制御装置2において、逆運動学変換部12から出力された各駆動軸速度指令にゲインを乗じて調整した値を出力する速度ゲイン乗算部13と、環境認識センサ7と、内界センサと、直交座標系の速度指令およびセンサによって取得した情報から駆動軸速度補正量を計算する駆動軸速度補正量計算部14と、駆動軸速度補正量計算部14から出力された補正量に基づき速度ゲイン乗算部13の出力値の補正を行う駆動軸補正部15とを備える。
(もっと読む)
自律走行装置およびプログラム
【課題】無駄な装置本体の回転をなくして確実に障害物を回避し、効率よくかつ偏りなく作業領域を走行できるようにした自律走行装置を提供することを目的とする。
【解決手段】装置本体1を移動させる左、右駆動モータ3a、3bと、障害物を検知する左、中、右超音波受信手段6a〜6cと、衝突検知手段10と、装置本体1の側面方向の障害物との距離を測定する左、右赤外線送受信手段7a、7bとを備え、左、右駆動モータ3a、3bを制御して障害物回避制御と障害物の際に沿って移動する際移動制御とを実行するようにし、左、右赤外線送受信手段7a、7bは、障害物回避制御の実行時に障害物との最接近値を検知し、障害物回避制御はこの最接近値を基準に必要最小限の回転角度だけ装置本体1を回転させるようにしたものである。これによって、最接近値を基準に必要最小限の回転角度だけ装置本体1を回転させることができる。
(もっと読む)
自律移動装置
【課題】作業用の自律移動装置において、簡単な構成により、ユーザの思惑に違わない作業結果を実現可能とする。
【解決手段】自律移動装置1は、作業エリアと作業内容とに関するユーザからの作業指示に基づいて作業エリアまで自律的に移動して作業を行うため自己の各部を制御する制御手段2と、ユーザからの作業指示を受け取ると共にユーザに応答を表示する操作インターフェイス3とを備え、制御手段2は、操作インターフェイス3を介して作業指示が入力されると、作業エリアまでの移動時間とその作業エリアにおける作業時間とを見積もることにより作業指示に関する作業の遂行に必要な所要時間を推定し、その推定結果を操作インターフェイス3を介してユーザに提示する。制御手段2は、作業の遂行に必要な所要電力量を見積もり、電池残量検知手段4によって検知された電池10の残電力量と比較し、その比較結果をユーザに提示する。
(もっと読む)
121 - 140 / 272
[ Back to top ]