
Fターム[5H301GG17]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413) | ジャイロ (272)
Fターム[5H301GG17]に分類される特許
41 - 60 / 272
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
移動体の旋回角度・方位・位置を検出するシステムおよび方法

【課題】 移動体の旋回角度および方位を検出するシステムを提供する。
【解決手段】
移動体には、所定の走査角度範囲にわたって周囲の対象物までの距離データを生成する距離計が搭載されている。検出システムは、フーリエ変換手段25と、旋回角度演算手段28と、方位演算手段29を備えている。フーリエ変換手段25は、上記距離データ又はこの距離データに基づき演算された上記周囲対象物の二次元マップデータを、空間周波数領域においてフーリエ変換する。旋回角度演算手段28は、移動体が第1の方位から第2の方位へと旋回する際に、上記第1の方位での上記フーリエ変換データの所定次数の成分例えば三次成分と、上記第2の方位での上記フーリエ変換データの三次成分の位相差に基づき、移動体の旋回角度を演算する。方位演算手段29は、検出された旋回角度と既知の第1の方位に基づき、移動体の第2の方位を演算する。
(もっと読む)
走行体の追従制御システム及びその制御方法
【課題】平面上を自由に走行する先導無人車に後続無人車を追従させる追従制御システムを提供する。
【解決手段】追従システム1は、第一走行体20に配置され、第一走行体および第二走行体10の位置と車体方向を特定する走行体位置検出部2と、前記車体方向から複数の進行角度を発生させる進行角度発生部3と、進行角度ごとに将来制御パラメータを計算し、第二走行体の将来位置と第一走行体との距離を計算する第一差異計算部4と、将来制御パラメータと現在制御パラメータの差異を計算する第二差異計算部5と、複数の進行角度の中から最適進行角を選定する最適進行角選定部6と、最適進行角選定部6で選定された制御パラメータを駆動機構11に出力する走行指令部7で構成される。
(もっと読む)
車両の走行制御システム
【課題】走行車両を軌道に沿って走行させる走行制御システムを提供する。
【解決手段】走行車両200は、走行方向と直交する方向の両側において同軸上に配置された左右一対の車輪210、210を有し、これら車輪210、210にトルク指令を与えることで走行する。摩擦路面には、軌道Lから離れるに従って摩擦が小さくなるように摩擦係数の分布が設定されている。走行車両200は、左右の車輪210、210に対し同じトルク指令値を与えながら走行する。
(もっと読む)
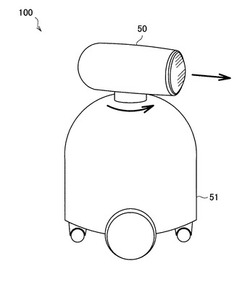
無人移動体の制御方法及び遠隔操縦装置
【課題】遠隔操舵部を有する遠隔操縦装置に、他の遠隔操縦装置から操舵主導権を移管するに際して、無人移動体を停止させずに操舵主導権を移管し得る無人移動体の制御方法及び遠隔操縦装置を提供する。
【解決手段】ジョイスティックタイプの遠隔操舵部50及び自律走行車Cの遠隔操縦用カメラ14で得た画像を映し出すディスプレー40を有する遠隔操縦装置Bに操舵主導権を移管するに際して、遠隔操縦装置Bのディスプレー40の画面に、自律走行車Cの操舵範囲SAと、自律走行車Cの実際操舵位置SPと、この実際操舵位置SPに基づいて設定される安全許容範囲SZを表示させると共に、遠隔操縦装置Bにおける遠隔操舵部50の指示スティック51の位置51Aを重ねて表示させ、遠隔操縦装置Bのディスプレー40画面における指示スティック51の位置51Aを安全許容範囲SZ内に入れた状態で、管制局Aから遠隔操縦装置Bへの操舵主導権の移管を許可する。
(もっと読む)
無人移動体の制御方法及び無人移動体
【課題】自律移動可能な半自律走行車を遠隔操縦するに際して、一旦停止させたり大幅に減速させたりすることなく、障害物の回避動作や交差点での進路変更を安全に行わせることが可能である無人移動体の制御方法及び無人移動体を提供する。
【解決手段】測距データから移動経路を作成して、移動経路上を自律して移動可能な半自律走行車Bの制御方法であって、移動中に新規操舵指令及び新規速度指令を得た時点で、これに基づく新規移動経路T上で且つ現在速度及び新規速度のうちの大きい方の移動速度に対応する制動距離内に障害物Dが有るか否かを判定し、障害物Dが有る場合には、新規移動経路Tの横に障害物回避経路Rを設定すると共に回避経路R上の障害物Dの有無を判定し、以降、障害物Dのない障害物回避経路Tが設定されるまで上記処理を繰り返し、障害物回避経路Tを設定し得ない場合には、半自律走行車Bを停止させる。
(もっと読む)
無人車両の半自律走行システム
【課題】走行環境の違いや通信環境の変化に関わらずに、無人車両を適切に走行させられるようにする。
【解決手段】本発明は、走行領域内の測距データを取得するための測距部を有し、この測距部により取得した測距データに基づき自律走行可能な無人車両と、この無人車両と無線通信回線を介して接続され、その無人車両の遠隔操縦を行うための遠隔操縦装置とを有する無人車両の半自律走行システムにおいて、測距部により取得した測距データに基づき、走行領域内の走行環境を評価する走行環境評価手段10cと、走行環境の評価結果に基づいて、無人車両の走行を担う自律走行機能と遠隔操縦との混成割合を決定する混成割合決定手段50aと、決定された混成割合の自律走行機能と遠隔操縦に従って、無人車両を走行させる混成走行手段30aとを有している。
(もっと読む)
自動搬送車
【課題】簡易な手法により適切な検出エリアを設定して障害物の確認を行う自動搬送車を提供すること。
【解決手段】走行位置及び進行方位を算出する演算手段24と、その走行位置や進行方位を基に予め備えた走行ルート情報に従った走行制御を行う走行制御手段25とを有するものであって、障害物の確認を行う検出エリアを設定する検出エリア設定手段27と、検出エリア内に物体が存在するか否かを検出する物体検出手段26とを備え、物体検出手段からの障害物情報に基づき走行制御手段25が徐行や停止の走行制御を行うようにしたものであり、検出エリア設定手段は27、走行位置が直線経路であるかカーブ経路であるかを確認し、直線経路であれば所定の計算式に基づいて算出した範囲を検出エリアA,B,Cとし、カーブ経路であれば予め用意された所定数のエリアパターンから選択した範囲を検出エリアDとするようにした自動搬送車。
(もっと読む)
移動ロボットの遠方環境認識装置及び方法
【課題】小型かつ安価な装置を用いて、高速走行時に検出が必要な検出必要距離内に存在する平面及びある程度小さな障害物も検出することができ、かつ走行路に対して前方の走行可能領域が傾いており、検出必要距離内に存在する障害物を検出できない場合でも、走行安全性を確保することができる移動ロボットの遠方環境認識装置及び方法を提供する。
【解決手段】移動ロボット10に走行経路の生成に必要な環境地図データ5を出力する遠方環境認識装置。移動ロボット10に固定して配置され前方の平面領域を含む相互に重複する領域の画像を撮像する一対の車載カメラ22と、移動ロボットに固定して配置され前方正面及び所定の検出必要距離に相当する下向き角度でレーザ光を前方左右に走査しその反射光から障害物の位置を検出するレーザセンサ24と、車載カメラとレーザセンサの出力から単一の座標系に定義された平面領域1及び障害物4を含む環境地図データ5を生成するコンピュータ26とを備える。
(もっと読む)
向き計測装置、向き計測システム、向き計測方法、及び向き計測プログラム
【課題】移動装置が、自装置の方向を正確に測定できること。
【解決手段】位置積分部1162は、位置の変化量を積分して移動ロボット1の位置を示す推定位置情報を推定する。方向積分部1161は、方向の変化量を積分して移動装置の方向を示す推定方向情報を推定する。位置補正部1163は、絶対位置測定装置から受信した位置情報であって時々刻々の移動ロボット1の位置を示す絶対位置情報と、時々刻々の推定位置情報と、を同定して、方向のずれを補正する方向補正値を算出する。方向補正部1164は、方向補正値を用いて、推定方向情報が示す方向を補正する。
(もっと読む)
自律移動方法及び自律移動体
【課題】磁気ナビゲーションに基づいて自律移動する移動体が自己位置を見失うのを抑制する。
【解決手段】出発地から目的地まで移動体が移動する移動経路に沿って生じている磁気を予め計測して得られた環境磁気データと、移動体が前記移動経路に倣って移動する際に、移動経路に沿って生じている磁気を実測して得られる実測磁気と、を比較しながら移動体を自律移動させる方法に関する。環境磁気データは、第1の環境磁気データ群と第2の環境磁気データ群とを少なくとも含む。第1の環境磁気データ群と第2の環境磁気データ群は、移動体の移動方向と直交する幅方向に互いに間隔を空けて計測されたものである。
(もっと読む)
自律移動方法及び自律移動体
【課題】出発地から目的地に移動する際に、通過する経路を容易に変更できる自律移動方法及び自律移動体を提供する。
【解決手段】出発地から目的地まで移動体が移動する移動経路に沿って生じている磁気を予め計測して得られた環境磁気データを含む地図データと、移動体が移動経路に倣って移動する際に、移動経路に沿って生じている磁気を実測して得られる実測磁気と、を比較しながら移動体を自律移動させる方法に関する。この地図データは、移動経路に沿った環境磁気データが、移動経路上に設けられるノードにより区間経路に区分され、かつ、ノードに対応付けて記憶されるノード情報を含む。移動体は、ノード情報を検知すると、当該ノードに連なる区間経路に対応する環境磁気データと実測磁気とを比較しながら自律移動する。
(もっと読む)
自動搬送車
【課題】カーブ走行時における走行位置の補正を簡単な構成で容易かつ確実に行うことができる自動搬送車を提供すること。
【解決手段】検出手段21,22の検出値より得られる走行距離及び方位角を基に現在の走行位置及び進行方位を算出する演算手段23と、走行位置及び進行方位を補正するための補正値を算出する補正手段25と、予め備えた走行ルート情報に従って走行制御を行う走行制御手段27とを有するものであり、複数の情報発信手段15から情報を受信する情報受信手段24を車体の進行方向前側に備え、補正手段25は、現在の走行経路がカーブ経路であるか否かを判別し、カーブ経路であると判別した場合には、検出手段22、24の検出により得られた車体方位角と位置情報とを基に補正値を算出し、演算手段23が前記補正手段の補正値に基づいて補正を行うようにした自動搬送車10。
(もっと読む)
自動搬送車
【課題】簡易な構成を用いてコストの上昇や作業の煩雑化を防止しつつ車両の位置精度を向上させることができる自動搬送車を提供すること。
【解決手段】走行ルート上に配設された複数の位置情報発信手段15からの情報を受信する情報受信手段22と、その情報受信手段22を介して得られる位置情報を基に、予め備えた走行ルート情報に従って走行制御を行う走行制御手段28とを有するものであって、所定状態における車輪径を基準車輪径D0とし、所定の走行状態に応じて予め特定されている補正係数Kに従って基準車輪径D0を補正することにより当該走行状態における等価車輪径D2を求め、その等価車輪径D2から走行位置を算出する演算手段27を備え、走行制御手段28が、その演算手段27により算出した走行位置に基づいて走行制御を行う自動搬送車10。
(もっと読む)
自律移動ロボット
【課題】人の移動したい方向が不明な場合でも、自律移動ロボットの適切な移動を実現する。
【解決手段】動作決定部80及び走行制御部66は、音声認識部56の認識結果に基づいて人が自律移動ロボットを退かそうとしているか否かを判定するとともに、人物検出部60と顔検出部52の検出結果に基づいて人が移動したい方向を判定する。この判定の結果、人に自律移動ロボットを退かそうとする意志があるが移動したい方向が不明と判定された場合には、自律移動ロボットを、人から離れる方向に移動させ、自律移動ロボットが人から離れる方向に移動した後に人が動いた方向に基づいて、自律移動ロボットを人から離れる方向に移動する。
(もっと読む)
自律移動ロボット、これを用いた自律移動ロボットシステム及び自律移動ロボットの移動方法
【課題】自重の増加を回避するとともに機動性を確保し、かつ、センサ類の搭載性の低下を招来することなく移動中における安全性を確保できるようにする。
【解決手段】本発明は、移動領域内の測距データを取得するための測距部33と、移動領域内を移動するための駆動機構とを有し、生成した移動経路に沿って自律的に移動するものであり、移動経路に沿い、被索敵体から自己を遮視可能な遮視位置の候補を抽出する遮視位置候補抽出手段34bと、索敵部35によって取得した被索敵体の索出データに基づいて、被索敵体を索出する領域区分手段34aと、抽出した遮視位置の候補から、被索敵体から遮視可能な遮視位置を選定する遮視位置選定手段34cと、選定した遮視位置に向かう移動経路を生成する移動経路生成手段41bと、駆動機構54を介し、選定した遮視位置に向けて生成した移動経路に沿って移動させる移動手段51aとを有している。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
移動ロボットの位置認識のための地図生成および更新方法
本発明は、移動ロボットの位置認識のための地図生成および更新方法に関し、より詳しくは、地図生成時には抽出されたランドマークと推定されたランドマークの確率誤差に基づいて抽出されたランドマークを登録し、地図更新時には既に登録されたランドマークの正確度を算出し、正確度が低いランドマークのレベルを調整したり誤登録されたランドマークを除去したりして位置認識の誤差を最小化することができる、移動ロボットの位置認識のための地図生成および更新方法に関する。  (もっと読む)
(もっと読む)
自律走行ロボット及び自律走行ロボットの制御システム
【課題】自律走行ロボットを所望の行き先階とは異なるエレベータの停止階で降車でき、利便性に優れた自律走行ロボットの制御システムを提供する。
【解決手段】駆動輪11R、11Lの駆動用モータの駆動を制御するモータ制御手段を備え、エレベータ100を利用して移動する自律走行ロボット1の制御システムで、エレベータ100は、自律走行ロボット1に対して開閉扉の開閉状態を示す扉状態信号を送信する信号送信手段111を備え、自律走行ロボット1は、扉状態信号を受信する信号受信手段15と、エレベータ100からの降車を指示する降車指示手段17と、信号受信手段15が開閉扉の開状態を示す扉状態信号を受信し、かつ、降車指示手段17による降車指示があると、駆動モータを駆動して、自律走行ロボット1をエレベータ100から降車させる制御手段とを備える。
(もっと読む)
倒立振子型移動体の制御装置
【課題】手の操作により倒立振子型移動体の位置を変更させることが可能な倒立振子型移動体の制御装置を提供する。
【解決手段】倒立振子型移動体1は、基体9と、該基体9に接続され、基体9を前後左右方向に移動可能とする移動動作部5及びアクチュエータ装置7と、該移動動作部5及びアクチュエータ装置7を制御する制御ユニット50と、倒立振子型移動体1の外部に位置する操作者の手の動きを検知して、その手の動きによる指令内容を検出する指令検出器10と、を備え、制御ユニット50が、検出した指令内容に応じて前記移動動作部5及びアクチュエータ装置7の制御を行う。
(もっと読む)
41 - 60 / 272
[ Back to top ]