
Fターム[5H301GG17]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413) | ジャイロ (272)
Fターム[5H301GG17]に分類される特許
21 - 40 / 272
歩行ロボット装置及びその制御プログラム
【課題】環境地図の作成と自己位置推定を、求められる精度を確保しつつ、安価に実現することのできる歩行ロボット装置及びその制御プログラムを提供する。
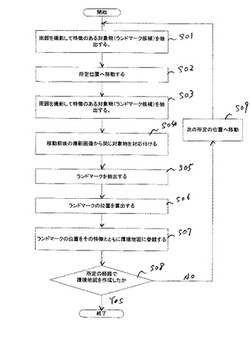
【解決手段】環境地図を作成する機能は、2ヶ所において撮影した地図作成用環境画像から撮影対象物を示す代表点を抽出し、代表点の位置と撮影した位置座標とから撮影対象物の位置座標を求め、撮影した地図作成用環境画像、代表点の位置及び前記撮影対象物の位置座標とを関連付けた環境地図を作成する。自己位置を推定する機能は、任意の位置座標において撮影した位置推定用環境画像中の撮影対象物の代表点に、対応する地図作成用環境画像中の撮影対象物の位置座標を対応させ、交会法によって前記歩行ロボット装置の自己位置を算出する。
(もっと読む)
移動体マップ装置、その処理方法及びプログラム

【課題】地図情報のメモリ容量を効率的に低減させつつ、地図情報の更新を適切に行うことができる移動体マップ装置、その処理方法及びプログラムを提供すること。
【解決手段】移動体マップ装置は、地図情報を記憶する第1記憶手段と、移動体の現在位置を検出する位置検出手段と、移動体の移動状態を検出する状態検出手段と、第1記憶手段の地図情報の中から、移動体の現在位置を含む所定領域を読出す読出手段と、第1記憶手段の地図情報から読み出された所定領域を、一時的に記憶する第2記憶手段と、位置検出手段により検出された移動体の現在位置と、状態検出手段により検出された移動体の移動状態と、に基づいて、移動体が所定領域内から外れるときの移動体の移動位置を予測する移動予測手段と、を備える。読出手段は、第1記憶手段の地図情報の中から、移動予測手段により予測された移動位置を含む所定領域を予め読出し、第2記憶手段に記憶させる。
(もっと読む)
無人移動体及び無人移動体の制御方法
【課題】道路のある環境下で且つ道路や交差点に関する事前情報が一切ない状況下で、曲がり道や交差点を道なりに走行させることができ、交差点での右左折も曲折の指示のみで円滑に行わせ得る無人移動体及び無人移動体の制御方法を提供する。
【解決手段】特に指示がない場合には、それまで走行してきた走行路に継続し易い道なり走行路Rを測距データに基づいて局所地図上で抽出して、この道なり走行路Rに沿って半自律走行車Aを自律走行させ、交差点Cで他の走行路Rlへ向かわせる場合には、交差点進入時に受ける新規操舵指令に従った他の走行路Rlへの変更路Rcを設定して、この変更路Rcを介して半自律走行車Aを他の走行路Rlへ進行させる。
(もっと読む)
自律走行体
【課題】不整地・未舗装路においても高速移動可能な経路を作成し、また、舗装路においても道路形状及び自律走行体の運動特性を考慮した走行経路を作成して高速走行ができるようにする。
【解決手段】本発明は、測距部31により走行領域内の測距データを取得する測距データ取得手段30aと、その測距データに基づいて、局所地図を作成する局所地図作成手段30bと、その局所地図に基づいて、自己位置から続く走行可能エリアを抽出し、走行可能エリア地図を生成する走行可能エリア地図作成手段30cと、走行可能エリア地図に基づいて、道なり方向を設定する道なり方向設定手段30fと、設定された道なり方向に基づいて、走行経路を生成する走行経路生成手段30gと、自己位置、及び方位データを取得する自己位置データ取得手段30hと、生成した走行経路及び自己位置データに従って、走行機構を介して走行させる自律走行手段10aとを有する。
(もっと読む)
飛行体の飛行制御システム
【課題】簡便に而も高精度に飛行体の高さ位置の測定を可能とし、無人飛行時の飛行体の飛行高度を適正に制御可能とした飛行制御システムを提供する。
【解決手段】飛行体と、該飛行体に設けられた航行手段8,9,10,11と、位置測定部17と、前記航行手段を制御する飛行制御部18と、前記位置測定部と前記飛行制御部とを制御する主演算制御部19とを具備し、前記位置測定部は飛行体の地上座標を測定するGPS装置23と、飛行体下方のデジタル画像を撮像する鉛直カメラ13とを有し、該鉛直カメラにより撮像した2地点の画像と、前記GPS装置により測定した2地点の地上座標と、前記鉛直カメラの焦点距離に基づき前記飛行体の高度を測定し、前記主演算制御部は測定された高度に基づき前記飛行制御部を介して前記航行手段を制御し、前記飛行体を所定の高度で飛行させる。
(もっと読む)
車両
【課題】路面勾(こう)配に応じて車両の目標加速度を制限することによって、坂道であっても車体が路面に接触することなく、適切にバランスを保つことができ、路面勾配に関わらず、車両の安定した走行状態を実現することができるようにする。
【解決手段】回転可能に車体に取り付けられた駆動輪12と、該駆動輪12に付与する駆動トルクを制御して前記車体の姿勢を制御する車両制御装置とを有し、該車両制御装置は、路面勾配に応じて車両加速度の目標値を制限するものであって、該車両加速度の目標値の制限値を、車体接地に対応する制限値と駆動トルクの最大値に対応する制限値とのうちの少なくとも1つに基づいて設定する。
(もっと読む)
無人車両の走行システムにおける走行制御方法および無人車両の走行システム
【課題】作業現場が施工された後、無人車両を走行させるまでに行なわれる作業現場の詳細な地形データを計測する工程、走行経路を生成する工程を不要とし、作業現場施工後、即座に走行経路に沿って無人車両を走行可能として、無人車両の生産性を向上させるとともに作業現場の運用コストを低減させる。
【解決手段】作業現場の地形データを作成して新たな走行経路の情報を生成する。次に、作成された地形データに基づいて新たな走行経路を含む作業現場を施工する。次に、生成された新たな走行経路の情報を車両に与え、仮の走行制御データに従い当該新たな走行経路に沿って走行させて、新たな走行経路の実際の地形データを取得する。次に、取得された新たな走行経路の実際の地形データに基づいて前記仮の走行制御データを修正する。次に、修正された走行制御データに従い無人車両を走行させる。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法
【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
位置推定方法、位置推定装置及びプログラム
【課題】位置推定方法、位置推定装置及びプログラムにおいて、環境変化に関する事前の予測、或いは、事前の知識に依存せずに自己位置推定の精度を向上することを目的とする。
【解決手段】コンピュータによる位置推定方法において、電子装置の移動履歴を取得して記憶部に一時的に格納する移動履歴取得工程と、前記移動履歴と、外的センサの観測情報と、電子装置が導入される環境の静的地図のデータと、電子装置の移動中に実時間で作成された非静的地図のデータに基づいて、電子装置の自己位置とその周囲の周辺地図を推定する推定工程を含むように構成する。
(もっと読む)
搬送車及びその制御方法
【課題】機体を制御によってバランスさせる倒立型搬送車において、垂直方向の変位に対する制御を行い、段差の乗り越え走行を安定した姿勢で行うことが可能な搬送車を提供する。
【解決手段】搬送車は、荷物もしくは人を搭載可能な荷台を有する機体4と、少なくとも2つの車輪に支持された台車5と、機体4と台車5との間に設けられ、台車4の進行方向に対して機体5と台車4との相対位置を変位させる移動機構部7と、台車4の垂直方向の加速度を検出する垂直加速度検出部と、車輪5に回転力を発生させる第1のアクチュエータと、移動機構部7を介して機体4に推力を発生させる第2のアクチュエータと、第1のアクチュエータと第2のアクチュエータとに指令を出力する制御部9とを備え、制御部9は、垂直加速度検出部によって検出された加速度の大きさに応じて、第2のアクチュエータの推力を調整する。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域の境界と走行予定領域における作業車の位置を簡易な構成で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】原動機(電動モータ)と、原動機に接続される駆動輪と、作業機(ブレード)とを備え、走行予定領域を原動機を駆動して自律走行しつつ作業する自律走行可能な作業車の制御装置において、方位(地磁気)センサの出力に基づいて絶対方位を検出すると共に、磁気ネイル(磁石)に対する位置を検出し、磁気ネイルの埋設位置を座標で示す地図情報と検出された位置に基づいて走行予定領域における作業車の位置を検出し(S12,S20,S32)、検出される絶対方位と作業車の位置とYawセンサなどの出力に基づいて算出される進行方位と走行距離に基づき、予め定められた作業プログラムに従って走行予定領域Aでの作業を制御する(S10からS46)。
(もっと読む)
走行制御装置
【課題】車両を目標位置まで自律走行させる場合に、車両が目標位置へ到着する可能性を向上させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100は、車両1の走行中に、前回の補正が行われた時に設定された直線距離daと、現在の車両1の車両位置から目標とする駐車位置Oまでの直線距離dnとを比較し、直線距離dnが直線距離daよりも短くなる場合に、目標とする駐車位置Oの再認識を試みる。これにより、車両1が目標位置Oに近づく度に、目標とする駐車位置Oを再認識できるので、再認識された駐車位置O’に含まれる誤差を徐々に(段階的に)低下させることができる。よって、目標とする駐車位置Oの特定精度を徐々に(段階的に)向上させることができるので、車両1が目標とする駐車位置Oに到着する可能性を向上させることができる。
(もっと読む)
走行制御装置
【課題】車両を目標位置まで走行経路に沿って自律走行させる場合に、車両を目標位置に精度良く到着させることができる走行制御装置を提供すること。
【解決手段】走行制御装置100は、駐車予定エリアPKに車両1が到着するより前に、撮像エリアKFを第3カメラ26cにより撮像し、画像解析を行って目標とする駐車位置O’を再認識し、現在の車両1の車両位置などを補正して、既存の走行経路RT1〜RT3に沿って車両1を走行させる。走行経路を再生成すると、走行距離の長い走行経路が生成されるおそれがあるため、既存の走行経路RT1〜RT3に沿って車両1を走行させることで、走行距離が延びることを抑制でき、車両1が位置ずれを起こすことを抑制できる。よって、車両1が走行経路RT1〜RT3から外れることを抑制できるので、車両1を目標とする駐車位置O’に精度良く駐車させることができる。
(もっと読む)
ジャイロスコープアレイを使用して角速度を減らすための方法とシステム
【課題】ジャイロスコープアレイを使用してビークルの角速度を減らす方法および装置を提供する。
【解決手段】ジャイロスコープアレイのジャイロスコープをディザリングし306、ジャイロスコープをディザリングすると共にジャイロスコープのジンバルモータを通る電流を得て308、ジャイロスコープをディザリングすると共に得られたジンバル・モーターを通る電流に基づくビークルの角速度を減少するジンバルレートコマンドを決定し314、前記ジンバルレートコマンドに基づいてジャイロスコープのジンバル・モーターを作動させる318、ことを特徴とする。
(もっと読む)
無人走行車両の誘導装置及び無人走行車両の誘導方法
【課題】GPSが使用できない場所でも無人走行車両を精度良く目標地点へ到達させることができる誘導装置及び誘導方法を得ることを目的とする。
【解決手段】誘導装置は、ステップ102において、無人走行車両が有するカメラで撮影された撮影画像から指定された複数の教示点Pn、及び無人走行車両が移動する移動領域を平面で示した移動地図から指定された複数の教示点Qnに基づいて無人走行車両の現在位置を導出する。そして、誘導装置は、ステップ116において、無人走行車両が導出された現在位置を起点として目標地点まで自律走行している途中で、計測手段による計測誤差の累積値が所定値に達した場合に、無人走行車両が有するカメラで新たに撮影された撮影画像から指定された複数の教示点Pn、及び移動地図から指定された複数の教示点Qnに基づいて無人走行車両の現在位置を再び導出する。
(もっと読む)
搬送車システム
【課題】搬送車が横行走行によってステーションに接近する場合の走行精度を高める。
【解決手段】搬送車システム1は、ステーション3と、走行部20と、被検出部49と、第1〜第3距離センサ41、43および45と、走行制御部63とを備えている。ステーション3は、無軌道の第1走行路5に対してX方向に交差するY方向に離れて配置されている。走行部20は、縦行走行と横行走行が可能であり、第1走行路5を縦行走行する。被検出部49は、ステーション3に設けられている。第1〜第3距離センサ41、43および45は、走行部20に設けられ、被検出部49を検出する。走行制御部63は、第1〜第3距離センサ41、43および45からの検出結果に基づいて、走行部20を横行走行でステーション3に接近させながら走行部20の位置および姿勢を制御する。
(もっと読む)
移動体装置及び移動制御プログラム
【課題】ロボットを、状況に応じて適切に移動制御する。
【解決手段】ロボットは、2輪速度差方式の移動部と、移動部に保持され、移動部とともに移動する上体部と、上体部に加わる外力ベクトルを取得する外力情報取得部52と、上体部に加わった外力ベクトルの作用点を、上体部の重心位置から並進方向に所定距離だけオフセットした位置に仮想的に置き換える作用点置き換え部54と、置き換え後の作用点を用いて並進方向及び旋回方向のそれぞれにメカニカルインピーダンス(慣性、粘性、弾性)を設定し、移動部の移動を制御する移動制御部56と、を備えている。
(もっと読む)
移動体の制御システム
【課題】無線通信装置の受信能力の低下による通信障害の発生を予測できる移動体の制御システムを提供すること。
【解決手段】移動体が、その走行位置を検出する走行位置検出手段と、無線通信装置にて受信する運行情報及び走行位置検出手段にて検出される走行位置情報に基づいて走行作動を制御する走行制御装置とを備えて構成され、運行制御装置が、移動体が無線通信装置にて送信する走行位置情報Pp、及び、無線通信装置が通信中継装置から受信している無線信号の受信強度を示す受信強度情報Prに基づいて取得される移動体の走行位置に対応した受信強度と、当該走行位置についての基準受信強度Ls1・Ls2とを比較して、無線通信装置の受信能力が低下している受信能力低下状態であるか否かを判別する受信能力評価手段を備えて構成されている移動体の制御システム。
(もっと読む)
自律移動体、自己位置推定方法、地図情報作成システム
【課題】自己位置推定の精度を向上することができる自律移動体、自己位置推定方法、地図情報作成システム、及び地図情報作成方法を提供する。
【解決手段】本発明の自律移動体は、周囲の障害物までの距離に応じた距離データを測定するレーザセンサと、記移動環境の異なる測定面での2次元の推定用地図情報を複数記憶する地図情報記憶部22と、自己位置又はレーザセンサの測定角度に基づいて、地図情報記憶部22に記憶された複数の推定用地図情報の中から1つの推定用地図情報を選択する地図情報選択部26と、地図情報選択部26で選択された推定用地図情報とレーザセンサで測定された距離データとに基づいて、自己位置を推定する自己位置推定部23と、を備えた。
(もっと読む)
21 - 40 / 272
[ Back to top ]