
Fターム[5H301KK13]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 集中監視制御装置(局)が複数あるもの (41) | 各装置(局)が特定の領域を分担するもの (21)
Fターム[5H301KK13]に分類される特許
1 - 20 / 21
移動体遠隔操縦システムおよびそのための制御プログラム
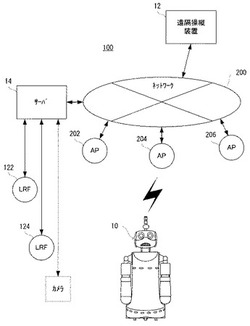
【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
走行台車システム

【課題】
システムサーバと走行台車間の通信を効率的に行う。
【構成】
システムサーバとアクセスポイントとを地上LANを介して接続し、制御周期をアクセスポイントから走行台車への指令用の時間帯と、走行台車からアクセスポイントへの報告用の時間帯とに分割する。アクセスポイントは指令用の時間帯に目標位置を送信し、走行台車は報告用の時間帯に位置を報告する。システムサーバは報告された位置に基づいて、目標位置を決定する。
(もっと読む)
移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラム
【課題】自律移動ロボットの移動に障害となる障害物の位置を事前に検出し、自律移動ロボットが目的地まで移動する経路を生成するための移動可能領域を抽出する移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラムを提供する。
【解決手段】予め定められた床面の高さを表す床面判定値に基づいて、移動体と異なる位置で移動体の移動範囲内に設置された距離センサの情報に基づいて算出された観測点の高さの情報に基づいて、移動体が移動できる床面を示す床面観測点を判別する床面判別手段と、距離センサの情報に基づいて算出された観測点の位置の情報に基づいて、予め定められた二次元のグリッドマップに、床面観測点が含まれるか否かを示すフラグをマッピングする床面マッピング手段と、床面観測点が含まれることを示しているグリッドマップの領域に基づいて、移動可能領域を抽出する領域抽出手段と、を備える。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、下位のコントローラだけで運用試験を行うときに自動運転を可能にする。
【解決手段】搬送車システムは、搬送車を搬送させるための搬送車システムであって、複数のストッカ(51,53,55,57)と、搬送車(44,48)と、複数のコントローラ(52,54,56,58)とを備えている。ストッカは、内部で物品を搬送可能である。搬送車は、複数のストッカ間で物品を搬送可能である。複数のコントローラは、互いに通信可能であり、複数のストッカおよび搬送車を制御する。コントローラは、搬送制御部61と、シナリオ記憶部63と、搬送指令作成部62とを有している。搬送制御部61は、搬送指令を実行することで搬送制御を行う。シナリオ記憶部63は、複数の搬送指令作成情報を含む搬送パターンシナリオを記憶する。搬送指令作成部62は、搬送指令作成情報に対応する搬送指令を作成する。
(もっと読む)
移動体システム
【課題】 移動体の位置を連続的に監視しながら、移動体を駆動するリニアモータの1次側を連続的に制御する。
【構成】 リニアモータの2次側部材を備えた複数の移動体と、移動体の移動経路に沿って2次側部材の長さ以下のピッチで複数設けられたリニアモータの1次側部材とを設ける。移動体の位置を検出するセンサを2次側部材の長さ以下のピッチで設けると共に、センサからの位置信号により1次側部材を制御するコントローラを設ける。
(もっと読む)
搬送車システムと搬送車システムの管理方法
【課題】 搬送指令の発生から割付までの待時間を短くし、特に搬送指令が一時的に特定のエリアに集中しても、待時間が極端に長くならないようにする。
【構成】 搬送車システムでの、空の搬送車の数をエリア毎に管理し、搬送車がエリア間を移動するための移動時間を記憶し、今後所定時間内に発生する、エリア内の位置を起点とする搬送指令の数と、エリア内の位置を終点とする搬送指令の数とを、エリア毎に管理する。管理手段のデータから、所定時間内で、空の搬送車が不足する時刻と空の搬送車の不足数とを、エリア毎に算出し、管理手段のデータから、時刻よりも出発元のエリアから搬送車が不足するエリアまでの移動時間分前の時刻に、空の搬送車に少なくとも1台の余裕がある余裕エリアを探索し、余裕エリアの空搬送車に対して、実質的に移動時間分前の時刻に、搬送車が不足するエリアへの移動を開始させる。
(もっと読む)
搬送システムと搬送指令の転送方法
【課題】搬送車システムに異常がある場合の無駄な通信を減らし、かつ搬送要求を実行不能とするまでの処理を簡単化する。
【解決手段】上位コントローラに、走行ルートを構成する部分ルートの接続関係と、各部分ルートの走行の可否とを記憶するための記憶部とを設ける。記憶部のデータから、搬送要求を実行するために必要な部分ルートと部分ルートの走行の可否とを求めて、搬送要求の内で実行可能な搬送要求のみを下位コントローラへ送信する。
(もっと読む)
移動体の運行管理システム
【課題】外部機器との間で無線信号が干渉したり、通信している情報が外部に漏洩する等のおそれが少なく、しかも、通信のための電力消費も少ないものに抑制した状態で、通信用中継装置と移動体側の通信装置との間で無線通信を行うことが可能な移動体の運行管理システムを提供する。
【解決手段】移動経路3に沿って移動する移動体1に備えさせた移動体側の通信装置との間で無線通信を行う通信用中継装置6を、管理手段7との間で管理情報を通信自在に通信線8により接続された中継装置本体12と、中継装置本体12に接続線13にて接続され、移動体側の通信装置との間で管理情報を無線信号にて通信するアンテナ部14とを備えて構成し、アンテナ部14を、長尺状でかつ横断面形状が平板状のシート状に形成され且つ厚さ方向に沿う通信可能領域を表面全体に形成するシート状アンテナ14Aにて構成されて、移動経路3に沿う状態で設置する。
(もっと読む)
走行車の走行制御システムと制御方法
【課題】 走行車システムのスループットを増す。
【構成】 地上コントローラと走行車とを通信システム及び地上を介して接続する。地上コントローラから走行車に位置の制御周期毎に位置指令を与え、走行車は制御周期内で複数の速度指令とトルク指令とを自ら発生させて、位置指令を達成する。
(もっと読む)
台車のモニタリングシステムとモニタリング方法
【構成】 コントローラから搬送指令を割り付けられて走行する台車をモニタリングするために、台車に割り付けられていない搬送指令の数をモニタに表示する。
【効果】 台車が足りているかどうかを容易に判断できる。
(もっと読む)
台車のモニタリングシステムとモニタリング方法
【構成】 複数の台車の位置を走行ルートのレイアウトと共にモニタに表示し、モニタ上で台車を指定し、指定された台車の出発位置と目的位置とをレイアウト上に表示する。
【効果】 台車の走行ルートが妥当かどうかを、容易に確認できる。
(もっと読む)
搬送台車システム及び搬送台車への走行経路の指示方法
【構成】 搬送台車の走行ルートを構成する、互いに連結された複数のセグメントから、搬送台車を実際に走行させる経路を構成する複数のセグメントをオペレータがマニュアルで指定することを受け付け、指定された複数のセグメントに従って、走行指令を作成し、走行指令に従って搬送台車を走行させる。
【効果】 マニュアルでの走行経路の指定が容易になる。
(もっと読む)
搬送車システム
【課題】操作者の安全を確保しつつ、システムを停止することなく搬送車を手動操作可能にする搬送車システムを提供する。
【解決手段】搬送車システムは、操作端末45と、通信装置43と、搬送車3とを備えている。操作端末45は、手動操作が可能である。通信装置43は、操作端末45により操作可能である。搬送車3は、通信装置43とは別体であり、通信装置43を介して操作端末45と通信が可能な無線通信処理部と、操作端末45と直接通信が可能な有線通信処理部とを有する。
(もっと読む)
搬送車システム
【構成】 複数の搬送車が走行する走行ルートに沿ってロードポートを設け、コントローラから搬送車へ搬送指令を割り付けると共に、割付済みの搬送指令を他の搬送車に移し替える。搬送指令を他の搬送車に移し替える際に、荷すくいするロードポートに他の搬送車が停止可能か否かを判別し、停止可能な際にのみ搬送指令を移し替える。
【効果】 搬送指令を移し替えた搬送車が、搬送指令とは異なる方向に分岐することがなくなる。
(もっと読む)
搬送制御装置及び搬送システム
【課題】例えば半導体装置製造用の各種基板などの荷を搬送する搬送車に夫々備えられており、地図情報に従って当該搬送車を軌道上で如何に搬送させるかを決める搬送制御装置において、当該搬送車の停止時間をなるべく短くする。
【解決手段】搬送制御装置は、地図要素を含む基準地図データを格納する第1格納手段(5b)と、地図要素に対して修正が加えられる場合に、修正用地図データを受信する通信手段と、受信された修正用地図データを格納する第2格納手段(5a)と、所定のトリガーを受けて、格納されている修正用地図データを取り出して、取り出された修正用地図データで、格納されている基準地図データを置き換える更新手段(4)と、格納されている基準地図データに従って、軌道上で搬送車が如何に搬送するかを決め、決められた通りに搬送するように搬送車を制御する制御手段(4)とを備える。
(もっと読む)
搬送システム及び搬送システム用プログラム
【課題】搬送制御負荷の軽減を図りながらも、制御が複雑になることを抑制することができるとともに設計の自由度を図ることができる搬送システム及び搬送システム用プログラムを提供する。
【解決手段】複数のコントローラC1,C2に同一の走行制御用データをそれぞれ記憶させるデータ記憶手段18と、搬送経路中の全てのステーションの位置情報を複数のコントローラC1,C2にそれぞれ記憶させるステーション位置記憶手段と、搬送車を走行させるための搬送経路を決定する2つのステーションを対とする複数の搬送経路情報を複数のコントローラC1,C2にそれぞれ割り当てて記憶させる割り当て手段14と、選択された2つのステーションの位置情報から搬送経路情報を取得し、複数のコントローラの中から取得した搬送経路情報が割り当てられたコントローラを特定するためのコントローラ特定手段15とを備えた。
(もっと読む)
移動体システム
【課題】リニアモータのリニアスケールからの座標を用いて、移動体間の干渉を防止する。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のコイルを制御する。コイルのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換し、移動体の速度と先行の移動体との距離を求める。求めた距離と先行の移動体の速度とから、先行の移動体との干渉防止速度を求めて、コイルを制御する。
【効果】先行の移動体との間隔を不必要に大きくする必要が無く、システムの効率が改善する。
(もっと読む)
搬送制御装置
【課題】軌道上に複数の搬送車を走行させてステーション間で物を搬送する搬送システムにおいて、複数の搬送車の連携動作を制御することにより、搬送システム全体の搬送効率を向上させる。
【解決手段】位置情報取得手段302により得られた搬送車301F、301Gの位置情報及び作業状態監視手段により得られた作業状態に基づいて、先行搬送車301Fがステーション200Aに停車して搬送物の受け渡しをしており、且つ、当該先行搬送車301Fと後行搬送車301Gとの間隔が設定値以下になったと判断したとき、搬送車301Gの搬送物の属性情報に基づいて、後行搬送車301Gに、先行搬送車301Fが停車しているステーション200Aを搬送先とする搬送物が積載されているか否かを判断し、積載されている場合には、先行搬送車301Fに対して搬送物の受け渡しを中止させて次のステーション200Cに移動させる制御を行う。
(もっと読む)
自立走行可能な家事装置の動作方法及びベースステーションの動作方法
【課題】 この種類の方法を、自立走行する床用の集塵装置が1つ又は複数の部屋で確実に動作可能になるように、さらに改良すること。
【解決手段】 本発明は、床用の集塵装置等の家事装置(1)を1つの部屋(A−D)又は複数の部屋(A−G)内で動作させる方法に関する。この種類の方法を、自立走行する床用の集塵装置が1つ又は複数の部屋で確実に動作可能になるように、さらに改良するために、必要に応じてベースステーション(3)に付加的にステーションエレメント(4)が配置され、これら(4)がステーションエレメント(4)の個々の場所について推測させる信号を送信し、家事装置(1)がこれらの信号を処理しつつ部屋(A−G)に進路をとることが提案される。
(もっと読む)
搬送台車システム
【構成】 ゾーンコントローラはポーリングにより管理下の天井走行車の位置を定期的に受信する。位置の受信に失敗した天井走行車がある場合、前回の位置で、その上流側にあった天井走行車の現在位置(更新後の位置)よりも下流側の位置を推定する。そしてこの位置に基づいて、分岐部9などの走行許可や、ロードポートからの物品の搬出を割り付ける。
【効果】 管理下の天井走行車からの位置を受信できなかった場合でも、交差点でデッドロックが生じない。
(もっと読む)
1 - 20 / 21
[ Back to top ]