
Fターム[5H303AA05]の内容
Fターム[5H303AA05]の下位に属するFターム
半導体デバイスの製造、組立 (95)
Fターム[5H303AA05]に分類される特許
1 - 20 / 26
トリガ発生装置
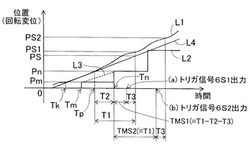
【課題】 サーボモータに同期して稼動する外部装置に対して作動を指示するトリガ信号を高精度に出力することが可能なトリガ発生装置を提供する。
【解決手段】 位置検出器のサンプリング開始からトリガ信号を発生させるタイマ設定時間を算出するまでに要する時間をサーボ側遅延時間とし、トリガ発生装置がトリガ信号を出力してから外部装置が作動を開始するまでに要する時間を外部装置側遅延時間とするとき、本発明のトリガ発生装置は、サーボモータの位置情報から算出された外部装置が作動開始位置に到達するまでの到達所要時間からサーボ側遅延時間及び外部装置側遅延時間を減算してタイマ設定時間を算出するタイマ設定時間算出部と、タイマ設定時間に基づきトリガ信号を出力するトリガ信号出力部と、を有する。
(もっと読む)
4軸アライメントステージの原点位置設定方法

【課題】 4軸制御の原点復帰動作を駆動軸同士の機械的な姿勢の相互干渉を抑えた状態で可能にする。
【解決手段】 XYθガイドとボールねじ直動機構からなる駆動ユニットを4台備えた4軸アライメントステージにて、各駆動ユニットに仮の原点位置を設定して(S1)、それを基準に4軸制御による原点復帰動作を行う(S3)。次いで、全軸同時サーボオフを行い(S4)、その直後に生じる各駆動ユニットのガイドブロックの移動量を計測し(S5)記憶させる(S6)。その後、移動量の計測値を補正量として各駆動ユニットの仮の原点位置を補正し(S7)、補正後の仮の原点位置を基準とする原点復帰動作と、全軸同時サーボオフ直後の移動量の計測及び記憶と、移動量の計測値を補正量とする仮の原点位置の補正を繰り返し、全軸同時サーボオフ直後の移動量が収束したときの仮の原点位置を、4軸制御による実際の原点復帰動作用の原点位置に設定する。
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
ピッチ駆動装置
【課題】ピッチ駆動による装着ヘッド等の可動体の振動を低減する機能を、ピッチ駆動の高速化とコントローラの演算負荷軽減の要求を満たしながら実現する。
【解決手段】部品実装機の装着ヘッド22に、複数本の吸着ノズル21を所定ピッチで配列し、部品吸着動作時や部品実装動作時に、装着ヘッド22を回転方向に吸着ノズル21の配列ピッチ分だけピッチ駆動する。ピッチ駆動の速度指令プロファイルとして、速度上昇を性能限界より低い速度で制限した台形波状の速度指令プロファイルを用いて装着ヘッド22をピッチ駆動することで、ピッチ駆動による装着ヘッド22のX軸方向の振動エネルギを減衰させる。振動エネルギを減衰させる周波数帯は、台形波状の速度指令プロファイルの最高速度指令によって変化させることができ、減衰させる周波数が装着ヘッド22の支持部分の固有振動数と一致するように最高速度指令を設定すれば良い。
(もっと読む)
サーボシステムの停止制御方法、停止制御装置およびこれを機能液滴吐出装置
【課題】サーボシステムの現在位置がインポジション幅に入ったか否かに関係なく、次動作に移行することのできるサーボシステムの停止制御方法等を提供する。
【解決手段】シーケンスコントローラ80からの指令により、移動対象物を、目標位置での偏差であるインポジション幅102に停止させるサーボシステムの停止制御方法であって、移動対象物の停止応答の過渡状態における減衰振動動作に対し、インポジション幅102を設定するインポジション幅設定工程と、設定したインポジション幅102を通過する減衰振動動作の通過回数を設定する通過回数設定工程と、通過回数をカウントする通過回数カウント工程112と、カウントした通過回数が、設定した通過回数になったときに、シーケンスコントローラ80に停止動作完了信号を出力する完了信号出力工程113と、を備えた。
(もっと読む)
作動制御方法および対回路基板作業装置
【課題】基板保持装置と、作業ヘッドと、その作業ヘッドと基板保持装置に保持された回路基板とを相対的に移動させる相対移動装置とを含む対基板作業装置において、作業ヘッドに作動,停止を繰り返させる際の衝撃や振動を抑制する。
【解決手段】相対移動装置を、作業ヘッドと基板保持装置との一方を保持して移動可能な可動部材と、駆動源を備えて可動部材を駆動する駆動装置と、可動部材の加速度を0から増加させた後、0まで減少させて、その可動部材の移動速度を0から増加させ、後に、加速度を0から減少させた後、0まで増加させて、移動速度を0まで減少させ、可動部材を第1位置から第2位置へ作動させるように駆動源を制御する制御装置とを含むものとし、制御装置を、可動部材の加速度を増加させる期間である加速度増加期間と減少させる期間である加速度減少期間とにおいて加加速度を非対称に制御する非対称制御部を備えたものとする。
(もっと読む)
位置計測装置及び位置計測方法、パターン形成装置及びパターン形成方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体の位置情報を計測精度の低下を抑制できる位置計測装置を提供する。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、位置が固定された回折格子を含むスケール板と、供給された光をスケール板に導く導光光学系の少なくとも一部を含む、移動体に配置されたエンコーダヘッドと、移動体と離れた位置で光を射出して、導光光学系に供給する光源とを備えている。
(もっと読む)
精密位置決め装置
【課題】 精密ないし微小な部品でも安定して位置決めしながら組立等の作業を行うことを可能にする精密位置決め装置を提供する。
【解決手段】 磁界に置かれたコイルを弾性案内部材により所定の方向に変位可能に支持し、該コイルに電流を流すことによってコイルを含むアクチュエータを駆動し、アクチュエータの変位により部品の位置決めを行うボイスコイルモータ5と、アクチュエータの変位を検出する変位センサ18と、変位センサで検出された変位から速度及び加速度を算出し、アクチュエータの位置、速度及び加速度と任意に設定した外力とからアクチュエータの駆動力を演算してそれに応じたコイル供給電流を出力するコントローラ6とを備える。
(もっと読む)
作動装置
【課題】装置本体に対して可動部材が駆動装置により移動させられる作動装置における可動部材の高速位置決めと装置本体の振動抑制とを両立させる。
【解決手段】位置指令部200,フィードフォワード補償器202,フィードフォワード補償器204およびフィードバック補償器208を備え、例えば、電子回路部品を回路基板に装着する装着モジュールにおいて装着ヘッドの位置決めを制御する位置制御系190に、装置本体の加速度を検出する加速度センサ,フィードフォワード補償器216およびフィードバック補償器218を備えた加速度制御系192を追加する。装置本体の振動をアクティブに抑制することにより、装着ヘッドの高速位置決めと装置本体の振動抑制とを両立させ得る。両フィードバック補償器208,218を可変補償器とし、目標位置近傍で滑らかに役割を交替させれば、一層良好に目的を達し得る。
(もっと読む)
ロボットの制御方法、ロボットの制御装置及び部品実装機
【課題】ビーム上の2地点間で移動体を移動させるときの移動体の移動時間がロボットの固有周期に近接している場合であっても移動体の移動時間を本来の適切な時間に保持することができるロボットの制御方法、ロボットの制御装置及び部品実装機を提供することを目的とする。
【解決手段】X軸ビーム5b上の第1の位置に停止している移動ステージ5cをX軸ビーム5b上の第2の位置まで移動させて停止させるとき、移動ステージ5cを第1の位置から起動させて所定速度まで加速移動させる加速移動指令信号S1、移動ステージ5cを所定速度で定速移動させる定速移動指令信号S2、移動ステージ5cを所定速度から減速移動させて第2の位置に停止させる減速移動指令信号S3をこの順で出力し、加速移動指令信号S1の出力継続時間t1及び減速移動指令信号S3の出力継続時間t3をそれぞれXYロボット5の固有周期Tの25%以下とする。
(もっと読む)
XY位置決め装置の駆動制御装置
【課題】複数のモータ軸を用いて1つの負荷を駆動する際に、モータ軸同士の干渉を抑えながら、最適な位置決め制御を可能とする。
【解決手段】複数のモータ軸を用いて1つの負荷Lを駆動するXY位置決め装置において、各モータ軸の制御系内に設けられた外乱オブザーバ68L、68Rと、該外乱オブザーバの出力部分に設けられた、位置偏差を監視し、位置偏差の量に応じて外乱オブザーバの出力を制限するオブザーバ出力調整部70L、70R、70と、を備え、位置偏差の量が多い場合には外乱オブザーバの出力を多く戻して積極的に補償を行ない、位置偏差の量が少ない場合には外乱オブザーバの出力を制限する。
(もっと読む)
機械装置のコントローラおよび可動範囲判定方法
【課題】 所定経路上を可動体を往復動させるような機械装置において、簡単でしかも操作者に負担を掛けずに運転プログラムのミスなどにより可動体が可動端に衝突するのを防ぐことができるようにする。
【解決手段】 可動体を移動させるモータ12と、位置検出器13と、ドライバ14と、ドライバ14に駆動指令を送るコントローラ15と、入出力装置18からなる機械装置のコントローラ15において、ドライバ14に位置決め指令を送り、可動体が可動端に到達した時の可動端パルスカウント値と、原点パルス検出時のパルスカウント値を取得し、機械原点と可動端パルスカウント値から前記可動体の可動範囲を演算し、可動範囲情報として不揮発性メモリ22に保存する可動範囲設定動作を行う可動範囲設定部26を備える。
(もっと読む)
電子部品実装関連装置の位置決め制御装置
【課題】電子部品実装機等の位置決め制御装置において、残留振動の軽減、位置決め時間の短縮(サイクルタイムの短縮)を実現する。
【解決手段】位置指令生成部12で生成した位置指令が入力される位置制御部13は、補償器構造を切り替える補償器構造切替回路20と、フィードフォワードのための補償器24,25と、フィードバックのための補償器26とから構成されている。補償器構造切替回路20は、ノッチフィルタK1(s)を使用する回路aと、ノッチフィルタK1(s)を使用しない回路bとを切り替えるスイッチ手段21とから構成されている。移動体の移動距離に応じて補償器構造切替回路20をノッチフィルタK1(s)を使用する回路aとノッチフィルタK1(s)を使用しない回路bとに切り替えて、残留振動の軽減、位置決め時間の短縮を図る。
(もっと読む)
電動機制御装置
【課題】簡便な調整により、外乱抑制力の向上と負荷機械の振動抑制とを同時に実現する電動機制御装置を提供する。
【解決手段】電動機制御装置は、電動機の位置を検出する位置検出手段および入力される負荷機械または負荷機械を駆動する上記電動機の位置に対する位置参照信号と上記電動機の位置信号との偏差が小さくなるように上記電動機を制御するためのトルク指令信号を出力する位置制御手段を有する電動機制御装置において、上記負荷機械の加速度を検出する加速度検出手段と、上記電動機の位置信号と上記加速度検出手段から出力される加速度信号を用いて、上記トルク指令信号を補正し、上記負荷機械または上記電動機の振動を抑制する補正信号を出力する振動抑制手段と、を有する。
(もっと読む)
移動体の位置決め制御装置及びレーザ加工装置
【課題】温度変化に起因するセトリング応答におけるオーバーシュートの増大を抑制することによって、位置決め精度に優れる移動体の位置決め制御装置及びレーザ加工装置を提供すること。
【解決手段】角度指令データ8の絶対値sが予め定める角度範囲(H≧s≧h)である場合、離散的時刻が開始された後、電流指令が出力されると、ループゲイン修正器12により今回測定されたオーバーシュート量Ovと予め定めるオーバーシュート量の許容値NOvとの差に基づいて次回の位置決めに使用するループゲインαを定める補正量Mを演算し、その結果に基づいてループゲインαを修正する。この場合、オーバーシュートに引き続いて発生するアンダーシュートの大きさを考慮するようにすることができる。
(もっと読む)
電動機の制御装置
【課題】繰返し運動を含む重畳的運動を指令する目標位置指令の反復性が失われている場合にも、位置偏差に基づいて適正な学習制御を行なうことができるようにする。
【解決手段】制御装置10は、繰返し運動を含む重畳的運動を指令する目標位置指令Cpと電動機12の出力部14からの位置フィードバック量Fpとの位置偏差Dpに基づき学習データLを求めて記憶する学習制御手段16を備える。学習制御手段は、予め定めた学習周期で位置偏差Dpに基づき学習データLを求めて記憶する第1の学習部30と、目標位置指令Cp及び位置フィードバック量Fpの少なくとも一方が、第1の学習部の学習周期とは異なる周期で生じる局部変化を含むときに、局部変化の影響を排除するように学習データLを補正する学習データ補正部32と、学習データ補正部が補正して得られた補正学習データALを用いて、位置偏差Dpを補正する位置偏差補正部34とを備える。
(もっと読む)
制御情報生成装置、及び制御情報生成方法
【課題】 自動運転装置の可動部の移動経路、移動順序が変更されても、可動部の動作を制御するプログラムの更新が不要な制御装置、及びその制御装置で使用する制御情報を生成する制御情報生成装置及び方法を提供する。
【解決手段】 可動部が複数の動作ステップの基準位置にいる状態の画像データを動作ステップの実行順に特定する動作ステップ設定部31と、可動部の基準位置を画像データ上で特定する基準位置設定部33を有するシーケンス設定手段21と、可動部の移動方向、及び動作ステップの開始から可動部の移動開始までの遅延時間を設定するタイミング設定手段22と、シーケンス設定手段21及びタイミング設定手段22への入力に基づいて移動経路情報R、遅延時間情報T、及び動作信号情報Sを生成する制御情報生成手段23を有するように制御情報生成装置2を構成する。
(もっと読む)
サーボ制御装置
【課題】製造コストが低く、小型であり、かつ、制御対象の制御周期が従来よりも短いサーボ制御装置を提供する。
【解決手段】サーボ制御装置50は、制御対象を駆動させるため駆動部20へ駆動電流を供給する電流供給部15と、少なくとも駆動電流値を検出する検出部17と、制御対象を所望の位置へ移動させるために駆動部20の駆動速度を制御する駆動電流を定めた電流指令を入力し、検出部17からフィードバックされた駆動電流値を入力し、駆動電流値に基づいて電流指令をディジタルロジック方式により補正して補正後の該電流指令を電流供給部15へ出力する論理演算部51とを備えている。
(もっと読む)
サーボ制御装置
【課題】回転軸の慣性イナーシャが大きい場合や、回転軸が高速で回転する場合であっても、回転軸側と送り軸側との同期誤差を少なくすることができ、これにより高精度・高能率加工を行うことができるサーボ制御装置を提供する。
【解決手段】スピンドルモータ25に対する上位制御装置30からの指令及びスピンドルモータ25に設けられた検出器からフィードバックされたスピンドルモータ25の検出値の差である位置偏差と、送り側モータ26の上位制御装置30からの指令及び送り側モータ26に設けられた検出器からフィードバックされた送り側モータ26の検出値の差である位置偏差との差分である同期誤差に基づいて送り側モータ26の位置偏差を補正する補正データを算出する補正データ算出手段20を備え、補正データを送り側モータ26の位置偏差に加算し、同期誤差をゼロに近づける制御をする。
(もっと読む)
ガントリ型XY位置決め装置
【課題】種々の移動パターンにおいて最適な位置決め制御を行うことのできるガントリ型XY位置決め装置を提供する。
【解決手段】 X軸フレーム16のY軸フレーム14A、14B上の位置及び移動対象18のX軸上の位置を制御することにより、該移動対象18をX−Y平面内で移動・位置決め可能としたガントリ型XY位置決め装置GP3において、前記X軸フレーム16のY軸フレーム14A、14B上の位置を制御するためのY軸モータ20A、20Bの制御系内に、X軸フレーム16上での移動対象18の移動等に起因してY軸モータ20A、20Bが受ける外乱トルク相当分を推定するオブザーバ演算部80A、80Bを備え、該オブザーバ演算部80A、80Bでの推定値Teに基づいて、Y軸モータ20A、20Bの駆動指令値Itp(It)を補正する。
(もっと読む)
1 - 20 / 26
[ Back to top ]