
Fターム[5H303JJ05]の内容
位置、方向の制御 (6,897) | 位置以外の検出変量、検出手段 (392) | 力 (25)
Fターム[5H303JJ05]に分類される特許
1 - 20 / 25
制御装置及び方法
【課題】アドミッタンス制御の不安定化を緩和できる制御装置を提供する。
【解決手段】ロボット制御装置1は、推力を発生させるアクチュエータ12とエンコーダ15と力覚センサ11とを有したアーム10を制御する力制御手段3の内部に、アームの質量よりも小さな0でない質量を有した仮想物体について予め定められた、仮想質量md、仮想粘性cdおよび仮想物体に加えられる仮想的な力としての目標力fdの各パラメータを含む運動方程式を力覚センサ11で検出された接触力fを入力として用いて解くことで目標位置pdを算出する仮想物体運動算出手段7と、目標位置pdとエンコーダ15で検出されたアームの位置pとを入力としてプロクシベーストスライディングモード制御を用いてアームに加える推力gを算出し、これをアクチュエータ12への指令値とする位置制御手段8とを備える。
(もっと読む)
同期制御装置

【課題】容易かつ遅れなしにカム曲線の切替が可能な同期制御装置を提供する。
【解決手段】カム曲線記憶部64は、第1のカム曲線および第2のカム曲線を記憶する。制御部66は、カム曲線の切替え前は、各制御タイミングで、第1のカム曲線上の値に基づいて、従動側部材への位置指令値を求め、カム曲線の切替え後は、各制御タイミングで、第2のカム曲線上の値に基づいて位置指令値を求め、カム曲線の切替期間は、各制御タイミングで、第1のカム曲線または従動軸の位置に基づく第1のデータと、第2のカム曲線に基づく第2のデータとを加重平均した値に基づいて従動側部材への位置指令値を求める。
(もっと読む)
位置決め制御装置、これを備えた工作機械
【課題】送り装置の加速性能を損なうことなく、位置決め精度を高めることができ、従来に増して高精度な位置決めを行うことができる位置決め制御装置、工作機械を提供する。
【解決手段】移動体と、移動体を送り軸方向に案内する案内機構部及び移動体を移動させる駆動機構部を有する送り装置と、送り装置を支持する構造体2と、駆動機構部の作動を制御して、工作機械上の基準位置に対する移動体の移動位置を制御する制御装置20とを備え、更に、前記構造体の変位に起因した前記基準位置に対する前記送り装置の前記送り軸方向における変位を導出する導出部11,28と、導出部11,28により測定された変位データを受信して、この変位を打ち消すための修正データを、制御装置20における制御信号に加算する加算部27とを備える。
(もっと読む)
指令生成装置
【課題】基準軸の位置に同期させたセンサフィードバック制御を可能にするモータ駆動制御システムを実現するための指令生成装置を得る。
【解決手段】機械装置の状態をセンサ5で検出して機械装置を駆動するモータ4をセンサフィードバック制御するモータ制御装置3に対して、基準軸の位置とセンサフィードバック制御の指令値の対応関係を示す指令プロファイルに基づいて、基準軸の位置に対応したセンサフィードバック制御の指令値の詳細を演算して出力する。
(もっと読む)
位置決め装置及び位置決め方法
【課題】高精度かつ高速に位置決めすることが可能な位置決め装置を提供すること。
【解決手段】本実施形態に係る位置決め装置は、撮像器3による撮像画像データに基づいて追跡誤差信号を算出する画像処理部40と、追跡誤差信号及び粗動機構のセンサ信号に基づく粗動機構制御信号により粗動機構1を制御する粗動機構制御駆動部10と、追跡誤差信号及び微動機構のセンサ信号に基づく微動機構制御信号により微動機構を制御する微動機構制御駆動部20と、粗動機構1の駆動力又は駆動トルクと、粗動機構1のセンサ信号と、機構パラメータ記憶部に記憶された機構パラメータとから、機構の運動方程式に基づいて粗動機構の動作により発生する撮像器の撮像画面内の加速度を算出し、粗動微動機構部の目標物に対する追跡誤差を低減させるために微動機構制御信号へ加算する微動機構追跡補正信号を加速度に応じて生成する補正信号生成部30とを具備する。
(もっと読む)
シフト装置
【課題】平面上の任意の位置にスライド操作可能な操作部に対しフォースフィードバック制御を行うことで、汎用性の高い二次元スライド操作タイプのシフト装置を提供する。
【解決手段】シフト装置1は、XY平面上の任意の位置へスライド操作可能なスライド操作部20と、スライド操作部の操作状態を検出するX軸及びY軸リニアエンコーダ161,162と、スライド操作部に力を付与するX軸及びY軸ボイスコイルモータ14,15とを備える。力覚制御部は、予め定められたシフトチェンジ操作の軌道である操作許容エリアの外縁部に「反力の壁」を生じさせるフォースフィードバック制御を行うことにより、軌道を逸脱するような異常なスライド操作を防止する。
(もっと読む)
軸トルク制御装置
【課題】負荷側モータ(エンジン)の回転数制御と駆動モータ(動力計)の軸トルク制御の干渉を抑制した軸トルク制御ができる。
【解決手段】軸トルク制御器は、エンジンが速度制御されている場合に動力計に対するトルク外乱を外乱オブザーバ21により推定して動力計のトルク指令値にフィードバックすることにより動力計の加速度制御系を構成する。さらに、軸トルク検出値または軸トルク推定値を共振比制御理論に基づいて決定されるゲインKr(28)で動力計の加速度指令値にフィードバックし、さらにまた、動力計の速度検出値ω2を所定の共振抑制効果が得られるように決定したゲインKvで動力計の加速度指令値にフィ−ドバックし、及び、軸トルク指令値に軸トルク検出値が追従するように比例積分制御系23を構成する。
(もっと読む)
ステージ装置およびその制御方法
【課題】試料と副ステージを確実に密着させても、試料を破損する危険の少ないステージ装置の制御方法を提供する。
【解決手段】試料9を載置する主基台1と、主基台1に対向配置された副基台7と、副基台7上のアクチュエータ6と、副基台7からバネで吊り下げられるアクチュエータ6によって制御される副ステージ8と、副基台7と前記副ステージ8との間の距離を計測する距離センサとを備え、試料9の厚さ方向の公差を接触時最大位置決め誤差と定義したとき、アクチュエータ6の各出力推力制限値FL[p]を、予め求めた試料が存在しない場合の各出力推力に試料9が許容する押し当て力を加えた値とするステップと、副ステージ8の位置許容偏差を副ステージ8に設定された位置許容偏差に接触時最大置決め誤差を加えた値とするステップ等の5ステップより試料9にアクチュエータ6が接触したと判断する。
(もっと読む)
位置決めシステムおよび方法
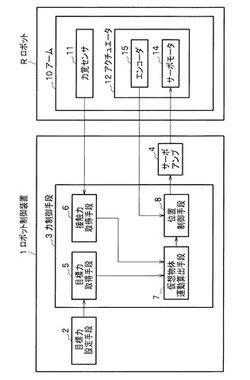
本発明は固定ベース(2)、物体のためのサポート(3)、固定ベース(2)に対してサポート(3)を配置するのに力を加えるためのアクチュエータ(4)、サポート(3)上の荷重を測定するためのセンサ(5)、およびサポート(3)の位置を制御および/またはシステム(1)の少なくとも1つの共振周波数を減衰するために測定された荷重を処理するための制御装置(6)を含む物体を位置決めするためのシステム(1)を提供する。本発明はまた、システム(1)を制御するための方法(10)を提供する。 (もっと読む)
操作方法および操作装置
【課題】動作範囲が異なるジョイスティックとモバイルロボットとの間で力覚フィードバックを得ながらの操作を可能とする。
【解決手段】動作範囲が異なるジョイスティック10とモバイルロボット11とを用い、ジョイスティック10によりモバイルロボット11を操作する。モバイルロボット11の移動中に、当該モバイルロボット11が受ける時系列な力の触覚情報を取得し、取得した前記触覚情報を時間領域で解析処理し、解析処理結果からの接触情報をジョイスティック10にフィードバックするから、力覚フィードバックを得ながら操作を行うことができ、動作範囲の異なるジョイスティック10とモバイルロボット11との間で、直感的な操作が可能となる。
(もっと読む)
精密位置決め装置
【課題】 精密ないし微小な部品でも安定して位置決めしながら組立等の作業を行うことを可能にする精密位置決め装置を提供する。
【解決手段】 磁界に置かれたコイルを弾性案内部材により所定の方向に変位可能に支持し、該コイルに電流を流すことによってコイルを含むアクチュエータを駆動し、アクチュエータの変位により部品の位置決めを行うボイスコイルモータ5と、アクチュエータの変位を検出する変位センサ18と、変位センサで検出された変位から速度及び加速度を算出し、アクチュエータの位置、速度及び加速度と任意に設定した外力とからアクチュエータの駆動力を演算してそれに応じたコイル供給電流を出力するコントローラ6とを備える。
(もっと読む)
回転体駆動装置
【課題】 感光ドラムにトルクを付与する複数の駆動部の角速度制御を複雑化することなく、感光ドラムの駆動に必要なトルクを確保しつつ、感光ドラムの角速度制御の応答性を向上させる。
【解決手段】 感光ドラム11に駆動伝達部を介して駆動トルクを付与する主駆動部100と、主駆動部100から感光ドラム11に伝達される駆動トルクを制限するトルクリミッタ102と、感光ドラム11の角速度を補正するためのトルクを付与する補正駆動部103と、感光ドラム11の角速度を検知するエンコーダ104と、エンコーダ104の検知結果に基づいて補正駆動部103が付与するトルクを制御する補正駆動制御部105を設ける。
(もっと読む)
ロボットの制御方法および制御装置
【課題】 ロボットの衝突検出後の停止動作には、衝突検出位置へ戻す方法、動作方向に対しモータ最大の逆トルクで制止させる方法がある。前者は応答性が悪く、停止時間が長引き、衝突による損傷防止ができない可能性がある。後者はトルクの印加時間を予め設定する必要があり、印加時間が短いと減速が不十分で衝突損傷が大きくなり、印加時間が長いと逆方向へな動作を行い再衝突の可能性がある。
【解決手段】 衝突検出後、モータ回転方向と衝突方向が逆の場合は、位置制御から電流制御に切り換え、モータ回転と逆方向のトルクをモータで発生させモータ回転速度を減速し、衝突エネルギーを緩和する。その後、モータ回転速度が設定以下になれば、柔軟制御に切り換え、衝突で生じた減速機等での歪みを解消する。モータ回転方向と衝突方向が同じ場合は、位置制御から直接柔軟制御に切り換える。
(もっと読む)
サーボ制御装置
【課題】モータ軸の共振特性が存在する状況下において、モータ軸による軸摩擦を抑圧する補償制御が可能なサーボ制御装置を提供する。
【解決手段】サーボ制御装置が、モータ1と、モータ1のモータ軸2の回転位置を検出する回転位置検出部4と、所定値及び回転位置からモータ1へのモータトルク指令を生成する制御系5とを備え、回転位置とモータ1への印可電圧とに基づいて、外乱要素のうちのモータ軸2近傍に発生する摩擦トルクを推定し、摩擦トルクから印可電圧に加算される補償電圧を生成するオブザーバ9を備える。
(もっと読む)
電動機制御装置
【課題】簡便な調整により、外乱抑制力の向上と負荷機械の振動抑制とを同時に実現する電動機制御装置を提供する。
【解決手段】電動機制御装置は、電動機の位置を検出する位置検出手段および入力される負荷機械または負荷機械を駆動する上記電動機の位置に対する位置参照信号と上記電動機の位置信号との偏差が小さくなるように上記電動機を制御するためのトルク指令信号を出力する位置制御手段を有する電動機制御装置において、上記負荷機械の加速度を検出する加速度検出手段と、上記電動機の位置信号と上記加速度検出手段から出力される加速度信号を用いて、上記トルク指令信号を補正し、上記負荷機械または上記電動機の振動を抑制する補正信号を出力する振動抑制手段と、を有する。
(もっと読む)
制御装置
【課題】繰り返し試行する時間を省くことで力制御ゲインの設定及び調整を容易に行うことができる制御装置を提供する。
【解決手段】力制御回路7の内側に位置制御回路8を有する力制御システムによりロボット1を力制御する制御装置において、ロボット1を駆動する実際の制御条件で、ロボット1の個々の駆動軸に関する位置制御回路8の時定数Tを取得する時定数取得手段11と、ロボット1を駆動する実際の制御条件で、ロボット1の剛性値Kを取得する剛性値取得手段12と、力制御回路7の時定数が位置制御回路8の時定数Tより大きくなる条件で、時定数取得手段11で取得された位置制御回路8の時定数Tと剛性値取得手段12で取得された剛性値Kとから力制御回路7の力制御ゲインを算出するゲイン自動算出手段10と、を備える。
(もっと読む)
無限インパルス応答フィルタ回路、及び磁気ディスク装置
【課題】係数を適応的に変化させても安定的に動作可能なIIRフィルタ回路を提供する。
【解決手段】係数を適応的に変化させる無限インパルス応答フィルタ回路であって、 その伝達関数が、zの次数がN以下である多項式B(z)と、次数がNである多項式A(z)とを用いて、
で規定され、
として、前記多項式A(z)のzのN乗の項を1としたとき、前記Nが偶数及び奇数に対応して、前記多項式A(z)をあらかじめ定めた条件を満足するよう定められてなることを特徴とする無限インパルス応答フィルタ回路。
(もっと読む)
デジタルサーボ制御装置及びその制御方法
【課題】 トルクフィードフォワード信号の過補償を防ぎ、加減速終了時および位置決め時の偏差が非常に小さく計算が簡単でどのような指令にも対応できるデジタルサーボ制御装置及びその制御方法を提供する
【解決手段】 指令払い出し開始1回目のサンプリング時の速度指令の増分値dvaと最大速度vmaxを用いて、加速が終了するサンプリングkaendを計算で求め、トルク指令払い出しから、出力されたトルク指令によって制御対象が動作した検出値を取得するまでの遅れをsサンプリングとした時、(kaend ― s)サンプリング以降のトルクフィードフォワード信号を強制的に0とするという手順で処理するようにした。
(もっと読む)
位置制御装置、位置制御方法及び位置制御プログラム
【目的】物体の位置を、物体を保持する移動機構によって目標位置に速やかに追従させる技術を提供する。
【構成】本発明は、物体の位置を検出する位置検出器と、物体を保持しており物体に加える力の指令値が入力され入力された指令値を実現するように動力によって動作する移動機構と、物体に加える力の指令値を移動機構へ出力する指令装置を備える。指令装置内に構築された制御ロジックは、スライディングモード制御ロジックに対してs/(L+K・s+B・s2)の局所的なフィードバックループを付加したものである。この局所的なフィードバックループにより、物体の位置を目標位置に追従させる際にオーバーシュートを生じさせることなく、さらに指令装置が出力する指令値がチャタリングすることを防止できる。
(もっと読む)
数値制御機械の位置制御装置
【課題】ボールネジ駆動系を含む数値制御機械のサーボモータ駆動軸の位置制御装置において、駆動系を含む構造体を支持固定する機台部の剛性が低い機械構成時や、高加減速化動作が要求される場合などで、機台部の剛性に起因する低周波振動が発生しても、空間上の駆動部位置を正確に位置制御できる位置制御装置を提供する。
【解決手段】機台部変位を推定あるいは検出して、位置検出値に含まれる振動影響を除去し、正確な空間上の駆動部位置を求め、この駆動部位置が、位置指令値に一致することを目的とした補償制御を位置制御装置に加える。
(もっと読む)
1 - 20 / 25
[ Back to top ]