
Fターム[5H303KK23]の内容
位置、方向の制御 (6,897) | 制御部、演算部の機能 (1,155) | 適応制御を行うもの (164) | 負荷に応じてパラメータを変更するもの (34)
Fターム[5H303KK23]に分類される特許
1 - 20 / 34
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に、駆動対象を目標停止位置に停止可能とする。
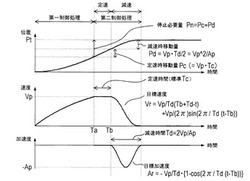
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を、駆動初期において実行する。一方、駆動対象の現動作状態に基づき、第二制御処理に対応するパターンで駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pn=Pc+Pdを算出する。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で、第一制御処理に代えて第二制御処理を実行する。この動作により、第一制御処理を長めに実行して駆動対象を高速に搬送し、第二制御処理では、上記パターンに対応する目標軌跡に追従するように駆動対象の位置P及び速度Vを制御して、駆動対象を精度よく目標停止位置で停止させる。目標軌跡は、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定されてなる。
(もっと読む)
モータ制御装置

【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
搬送装置
【課題】 消費エネルギを最小化することのできる搬送装置を提供する。
【解決手段】 移動部2を駆動するためのアクチュエータ3と、軌道情報を生成する軌道情報生成部5と、アクチュエータを作動させるコントローラ4とを備える。軌道情報生成部は、アクチュエータにおける駆動エネルギを運動エネルギに変換するときのエネルギ変換効率に関する情報を記憶する効率情報記憶手段と、移動部が移動するときの特有の情報を記憶する特有情報記憶手段と、移動部の移動条件に関する情報を記憶する移動条件情報記憶手段と、移動部の運動特性に関する情報を記憶する運動特性情報記憶手段と、前記運動特性に基づき移動部の移動に要する駆動エネルギを算出する演算手段と、前記演算手段により算出されたエネルギをパラメータに含む評価関数の値が最小となる加速時、定速時および減速時の軌道情報を決定する軌道情報決定手段と備える。
(もっと読む)
位置決め装置及び位置決め方法
【課題】高速かつ高精度に位置決めすることが可能な位置決め装置を提供する。
【解決手段】外乱相殺信号生成部において、粗動機構アクチュエータ電流センサによって検出される粗動機構アクチュエータ駆動電流信号と粗動機構から提供される粗動機構センサ信号とから粗動機構を駆動する力またはトルクを求めるとともに、さらにこの粗動機構の駆動力または駆動トルクと、粗動機構及び微動機構のセンサ信号と、機構パラメータ記憶部に記憶された粗動機構及び微動機構に関する機構パラメータとから、粗動機構の動作により微動機構に発生する外乱量を求め、この外乱量を打消すための外乱相殺信号を生成して微動機構制御信号に加算する位置決め装置を提供する。
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
サーボ制御装置
【課題】送り機構のボールスクリューが経年変化や温度変化で伸縮してボールスクリューの軸方向に沿う剛性が変化しても、このような剛性変化を補償して、テーブルの位置を正確にサーボ制御する
【解決手段】制御部100は、サーボモータ40をフィードバック制御して、負荷であるテーブル02をサーボ制御する。逆特性モデル300は、機械系の動的誤差を補償する速度補償信号V300を求めて、フィードフォワード補償制御をする。剛性変化補償部400は、ボールスクリュー30のネジ部31の軸方向に沿う剛性が変化したら、この剛性変化に応じて、逆特性モデル300の補償制御用伝達関数に含まれているネジ部の軸方向に沿う剛性値を変化させる。
(もっと読む)
電動機の制御装置
【課題】簡単な調整によって負荷機械に応じた適切な制御パラメータを得ることができ、多種多様な負荷機械を高精度かつ安定に運転可能とした電動機の制御装置を提供する。
【解決手段】電動機16により駆動される負荷機械20の位置が位置指令に一致するように電動機16を制御する制御装置であって、位置制御部12、速度制御部13及び電流制御部16を有する制御装置において、実現したい応答の速さを示す応答性設定信号と負荷機械種別判別信号とに基づいて、位置制御部12、速度制御部13及び電流制御部16にて使用する制御パラメータを自動的に演算する制御パラメータ設定手段23を備え、この制御パラメータ設定手段23における制御パラメータの演算アルゴリズムを、前記負荷機械種別判別信号に応じて変更する。
(もっと読む)
可動部重量を推定する機能を有する工作機械を制御する数値制御装置
【課題】工作機械の個体差や経年変化の影響を回避可能な機能を有する工作機械の数値制御装置を提供する。
【解決手段】加工プログラムに従って可動部を駆動するモータを駆動し、ワークに加工を行う工作機械を制御する数値制御装置において、加工プログラム名を読み込み、前回実行加工プログラム名を読み込み、加工プログラムを変更したか否かを判断する(SA1〜SA3)。変更した場合、最適制御パラメータを初期値に設定し、変更していない場合、設定された最適制御パラメータを読み込み、加工プログラムのブロックを読み込み、解釈し、実行し、早送り指令か否かを判断する(SA4〜SA7)。早送り指令の場合には、可動部重量推定フラグFLをオンし、加工プログラムの終了か否か判断し、加工プログラムが終了の場合には、実行した加工プログラム名と設定された最適制御パラメータを不揮発性メモリに記憶して処理を終了する(SA8〜SA11)。
(もっと読む)
XYステージ
【課題】負荷の質量や、負荷とX軸駆動部との距離が変化した場合でも、安定して機械共振および反共振を吸収できるXYステージを実現する。
【解決手段】X軸方向に移動制御される第1部材と、この第1部材上に直交して結合しY軸方向に移動制御されると共に、前記第1部材との結合位置より所定距離を隔てて負荷が搭載された第2部材よりなるXYステージにおいて、
X軸指令値に基づいて前記第1部材を移動制御するX軸制御系と、
Y軸指令値に基づいて前記第2部材を移動制御するY軸制御系と、
前記X軸フィードバック制御系に挿入され、この制御系で発生する機械共振および反共振を吸収するようにパラメータが設定されているフィルタ手段と、
を具備し、
前記フィルタ手段は、前記Y軸制御系における前記負荷の情報を取得し、前記パラメータの設定値を更新する動的パラメータ設定部を備える。
(もっと読む)
位置決めシステムおよび方法
本発明は固定ベース(2)、物体のためのサポート(3)、固定ベース(2)に対してサポート(3)を配置するのに力を加えるためのアクチュエータ(4)、サポート(3)上の荷重を測定するためのセンサ(5)、およびサポート(3)の位置を制御および/またはシステム(1)の少なくとも1つの共振周波数を減衰するために測定された荷重を処理するための制御装置(6)を含む物体を位置決めするためのシステム(1)を提供する。本発明はまた、システム(1)を制御するための方法(10)を提供する。 (もっと読む)
機械制御装置
【課題】 先端に重量物が取り付けられた長尺のアームを移動させる場合でも、振動を伴うこともなく目標位置に停止させる機械制御装置を提供する。
【解決手段】 機械制御装置40には、調節動作の際の比例ゲインが可変構造の位置調節器41を備え、さらに、この機械制御装置40には位置指令ブロック24の出力である位置指令値に基づいて、位置調節器41の比例ゲインを可変する指令を送出する比例ゲイン設定手段42を備えている。
この比例ゲイン設定手段42では、位置指令ブロック24からの位置指令値に基づく移動速度が遅いとき、すなわち、移動距離が短い位置指令値のときには位置調節器41の比例ゲインを大きく設定し、前記位置指令値に基づく前記移動速度が速いとき、すなわち、移動距離が長い位置指令値のときには前記比例ゲインを小さく設定するようにしている。
(もっと読む)
モータ駆動装置
【課題】簡単な操作で負荷イナーシャの変動に対しロバストなゲイン調整を可能にするモータ駆動装置を提供する。
【解決手段】トルクフィルタ3の応答周波数が、速度比例ゲイン2aに総イナーシャ推定値2bを乗じた結果を総イナーシャ最小値8bで除した速度制御の最大応答周波数に対し、一定の比以上となるよう速度比例ゲイン2aのパラメータを設定し、変更後の速度比例ゲインに総イナーシャの推定値2bを乗じた結果を総イナーシャの最大値8aで除した速度制御の最小応答周波数に対し、位置比例ゲイン1aから計算される位置制御の応答周波数、および速度積分時定数2cから計算される折れ点周波数が、一定の比以下となるよう位置比例ゲイン1aと速度積分時定数2cのパラメータをゲイン設定器8で設定する。
(もっと読む)
制御方法及び制御装置
【課題】モータを高効率に駆動するために好適な制御方法を提供すること。
【解決手段】印刷装置は、記録ヘッドを搭載したキャリッジを、主走査方向に往復運動させ、キャリッジの往復運動に合わせて、用紙を挟持するローラをLFモータにより駆動して、用紙を所定量ずつ送り出し、用紙に画像を形成する。この装置のLFモータ制御部35は、用紙位置y(t)を検出する位置検出部351と、LFモータへの操作量u(t)を算出する操作量演算部353と、操作量u(t)の演算に用いるパラメータθiを、用紙位置y(t)に基づき補正するパラメータ更新部355と、を備える。また、操作量演算部353は、最大速度V及び加速時間Tで定められる目標位置r(t)に基づき、操作量u(t)を算出する。
(もっと読む)
ジンバル軸受の摩擦を制限するようにフレックスピボットを有するジンバルサーボシステム用軸受組立体
ジンバルサーボシステムへの使用に適した支承組立体が提供される。支承組立体は、ハウジングと、第1のシャフトと、第1のシャフトがハウジングに対して軸線回りに回転するように第1のシャフトをハウジングに回転可能に結合する軸受と、ペイロードに結合されるようになった第1の端部を有する第2のシャフトと、フレックスピボット要素とを有し、このフレックスピボット要素は、第2のシャフトがフレックスピボット要素を介して第1のシャフトに対して回転するよう第1のシャフトの端部を第2のシャフトの第2の端部に回動可能に結合する。第2のシャフトの回転に応答して、フレックスピボット要素は、第1のシャフトの軸線回りに所与の角度回動するようになっている。回動角度は、第1のシャフトに対する第2のシャフトの変位を反映し、軸受の摩擦外乱に対応する。  (もっと読む)
(もっと読む)
機械制御装置
【課題】剛性が低い機械負荷の場合でも、機械負荷に外乱が加わる場合でも、機械負荷を所望に動作させるようにモータを正確に制御する機械制御装置を提供する。
【解決手段】機械制御装置は、外部から入力される指令信号に基づいて、機械負荷の想定した動作を負荷動作信号と同じ次元で表す第1の負荷動作参照信号を出力する負荷動作参照信号生成部と、負荷動作信号が第1の負荷動作参照信号に追従するように機械負荷の低剛性を考慮した演算によりモータ動作参照信号を出力するモータ動作参照信号生成部と、第1の負荷動作参照信号と負荷動作信号の偏差がゼロに近づくように算出する負荷動作補償力信号と、モータ動作参照信号とモータ動作信号の偏差がゼロに近づくように算出するモータ動作補償力信号とを加算するのと同等な演算により駆動力指令を出力する駆動力指令生成部と、を備える。
(もっと読む)
制御装置
【課題】繰り返し試行する時間を省くことで力制御ゲインの設定及び調整を容易に行うことができる制御装置を提供する。
【解決手段】力制御回路7の内側に位置制御回路8を有する力制御システムによりロボット1を力制御する制御装置において、ロボット1を駆動する実際の制御条件で、ロボット1の個々の駆動軸に関する位置制御回路8の時定数Tを取得する時定数取得手段11と、ロボット1を駆動する実際の制御条件で、ロボット1の剛性値Kを取得する剛性値取得手段12と、力制御回路7の時定数が位置制御回路8の時定数Tより大きくなる条件で、時定数取得手段11で取得された位置制御回路8の時定数Tと剛性値取得手段12で取得された剛性値Kとから力制御回路7の力制御ゲインを算出するゲイン自動算出手段10と、を備える。
(もっと読む)
サーボ機構の速度制御装置
【課題】オーバーシュートのない速い応答になり、モータ発生トルクが大きくならず速度制御系の安定度を高めるサーボ機構の速度制御装置を提供する。
【解決手段】2慣性系を有して、モータ速度をフィードバックし、負荷機械の速度の比例制御を行う比例ゲインを備えたサーボ機構の速度制御装置において、時間[0 T]において、初期値0,最終値1となる関数X(t)=t/T 但し、t:時間、Tは補償を完了する時間、の関数値を発生させ、
y(t)=x(t)×(JL/JM)
z(t)=y(t)+1 、とし、速度比例制御器kvの出力とz(t)(37の出力)とを乗算することにより負荷イナーシャの補償を行うものである。
(もっと読む)
モータの負荷イナーシャ推定方法
【課題】 モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
(もっと読む)
駆動制御装置
【課題】 フィードフォワード制御とフィードバック制御とを組み合わせた2自由度系の制御において、フィードフォワード制御による追従性・即応性を向上させる。
【解決手段】 フィードフォワード制御による操作量である電流フィードフォワード指令値とフィードバック制御による操作量であるフィードバック補償量とが、操作量合成部89にて合成される。更に、電流フィードフォワード指令値を補正するための電流フィードフォワード補正値が電流フィードフォワード補正値生成部90で生成され、操作量合成部89で合成される。電流フィードフォワード補正値は、目標値と実際の動作量との誤差のうち制御対象のメカ的なパラメータの誤差に起因して生じる分をなくすためのパラメータ補正量y2と、目標値と実際の動作量との誤差のうち制御対象に作用する摩擦に起因して生じる分をなくすための摩擦補正量y1とを、第2加算器110で加えたものである。
(もっと読む)
電動機制御装置およびそのフィルタ設定方法
【課題】 電動機制御装置のフィルタ設定において、パラメータ検討段階で実測値を活用することで最適なフィルタを効率よく設定できるようにする。
【解決手段】指令器4、制御器3、駆動力フィルタ部10、電流制御部6とを備えた電動機制御装置において、フィルタ設定部50を備え、フィルタ設定部50が、機械特性算出部11、フィルタ定数推定部33、模擬特性算出部31、実機特性確認部32とを備える。
(もっと読む)
1 - 20 / 34
[ Back to top ]