
Fターム[5H501DD01]の内容
Fターム[5H501DD01]に分類される特許
101 - 120 / 1,199
モータ制御装置、モータ制御方法、及び制御プログラム
【課題】位置制御ゲインを切り替える際の位置偏差を低減させ、整定時間を短縮する。
【解決手段】モータ制御装置は、モータを用いて対象物を目標位置に移動させる際に用いる加速度指令値を時系列に示す加速度パターンを生成し、生成した加速度パターンに対して、モータの応答特性に応じてモータの駆動速度を減速する期間を延ばす変更をし、変更した加速度パターンから位置指令値を出力する指令生成部と、指令生成部が出力する位置指令値と、対象物の目標位置との位置偏差に対する比例制御を用いてモータを駆動するとともに、対象物が目標位置の近傍に達したときに比例制御における比例制御ゲインを現在値より大きい値に変更する制御部とを具備する。
(もっと読む)
制御装置、および測定装置

【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
回転制御装置及び回転制御方法
【課題】 コンパクトな構成で作業台の回転制御の精度の向上を図ることができる回転制御装置及び回転制御方法を提供する。
【解決手段】 回転体の回転に連動して回転するロータリーエンコーダの読取信号を処理して回転ムラ信号と回転ブレ量信号とを生成し、回転駆動部において回転ムラ信号に応じて回転体の回転速度サーボ制御をなすステップと、処理部において回転ブレ量信号に応じてワークに対する位置サーボ制御をなす。
(もっと読む)
制御装置
【課題】 本発明は、例えばモータに自動車のエンジンの動作を模擬させたシステムにおけるモータの制御等、制御対象物の制御を行なう制御装置に関し、制御系の遅れ時間を高精度に補償した制御を行なう。
【解決手段】 制御対象物の動作速度を第1の角度に変換し、制御系の遅れ時間に相当する時間をその動作速度に応じた第2の角度に変換し、第1の角度と第2の角度とを加算して第3の角度を生成し、その第3の角度を、その制御対象物の制御対象要素を指令値通りに制御するための指令値に変換して、その指令値に基づいて制御対象物を制御する。
(もっと読む)
サーボモータのコイル温度検出装置、およびサーボモータ
【課題】モータ動作時にコイル温度の推定値を正確に行えるサーボモータのコイル温度検出装置、およびサーボモータを提供することを目的としている。
【解決手段】モータに流れる電流値を、前記モータに発生する誘起電圧に基づく回転速度値に基づき補正する電流補正部(101〜103)と、前記モータに印加される電圧の指示値と、前記補正された電流値とを用いて、逐次最小二乗法により、前記モータのコイルの抵抗値を推定する抵抗値推定部(104〜106)と、前記推定された抵抗値に基づき、前記モータのコイルの温度を判別する温度判別部107とを備える。
(もっと読む)
電動機制御装置
【課題】電動機をより適正に制御する。
【解決手段】モータ10の回転数Nmが大きいほど大きな変化中回転変化量Δθofsを用いて変換器34からの理想角θidを補正して得られる補正後理想角θidmoをインバータ12のスイッチング素子のスイッチング制御に用いる。これにより、電子制御ユニット40に入力された理想角θidをそのタイミングでレゾルバ装置22から出力された検出角θdetに対応する理想角に換算することができ、モータ10をより適正に駆動制御することができる。
(もっと読む)
電動アクチュエータシステム
【課題】初期化設定を行う回数を低減するようにした電動アクチュエータシステムを提供する。
【解決手段】回転角度検出手段220に、電動モータ110の回転角度に応じて発生するパルス信号を検出させ、この検出信号にパルスが停止したとき及びパルス飛びが発生したときといった異常が発生したときに初期位置設定を行う。これにより、初期位置設定を行う回数を大幅に低減させることができる。延いては、電動アクチュエータのパルス発生部153、155〜157のブラシや電動モータ110に内蔵されるブラシの耐久寿命を向上できる。
(もっと読む)
摩擦補償方法、モータ制御方法、摩擦補償装置、及びモータ制御装置
【課題】運動する物体の温度及び速度又は角速度変動に対応した摩擦損失補償の手法及び構成を提供する。
【解決手段】摩擦補償装置20は、温度別に測定された制御対象の速度又は角速度と駆動電流値との関係式で導出された摩擦損失推定関数の関数保持部22を有する。摩擦損失推定関数は、速度又は角速度に依存する第1の項の係数として温度を変数とする第1の関数と、第2の項として温度を変数とする第2の関数を含む。摩擦補償装置20は、ある時刻の速度又は角速度と温度とを受け取る入力部と、入力された速度又は角速度と前記温度とに基づいて、第1の項を計算して粘性抵抗補償値を算出する粘性抵抗補償演算部24と、入力された速度又は角速度と前記温度とに基づいて、第2の項を計算してクーロン摩擦補償値を算出するクーロン摩擦補償演算部25と、粘性抵抗補償値24とクーロン摩擦補償値とを合算して摩擦損失補償電流を算出する加算器28を含む。
(もっと読む)
サーボアンプの制御ループゲイン調整方法、プログラム及びロボット制御装置
【課題】ロボット動作中のサーボアンプの電源電圧の変動に対して簡易な制御で制御ループを安定化させる。
【解決手段】ロボットの各関節に設けられたサーボモータに対して外部からの制御指令に応じた該サーボモータの制御量を帰還させて制御ループを形成するサーボアンプの制御ループゲイン調整方法であって、前記制御ループゲインのデフォルト値及び前記サーボアンプの電源電圧のデフォルト値に基づいて、前記制御ループを形成するとともに前記サーボモータの駆動を開始する工程と、前記サーボアンプの電源電圧を検出する工程と、前記制御ループゲインを構成する制御ゲインのうち前記サーボアンプの電源電圧と相関して変化する制御ループゲインを、検出した前記サーボアンプの電源電圧の変化に対して逆方向に変化するように調整する工程と、を備える。
(もっと読む)
モータ制御装置、モータ制御方法、プログラム
【課題】 装置やモータの起動直後など、パルス信号の1周期の区間が検出されるまでは精度の良い速度情報を取得することができなかった。一方で、常に1/4周期のパルス信号に基づいて速度情報を得ようとすると、パルス信号に劣化が生じたときに算出される速度情報の精度が良くないため、あまり好ましくない。
【解決手段】エンコーダの両相両エッジをカウントし、1周期に満たない際はカウント値に応じて補間演算を行うことで駆動速度を取得して、高精度なモータ制御を可能とする。
(もっと読む)
電力変換装置
【課題】電動機の運転開始前に、エンコーダの光学センサの異常を検出可能とする。
【解決手段】半導体スイッチの駆動信号を生成する制御装置を有し、エンコーダの二相の出力信号から演算した回転速度を制御装置にフィードバックして前記駆動信号を生成する電力変換装置において、エンコーダ10の出力信号に基づいて配線系統の異常等を検出したときに、電動機200を停止させる安全遮断信号を制御装置50に送出する安全機能装置40を備え、制御装置50は、運転開始前に安全機能装置40からテスト開始指令が入力されたときに、電動機200の固定子巻線の線間に短期間だけ直流電圧を印加して回転子にトルクを発生させるための制御演算器51を有し、安全機能装置40は、前記直流電圧の印加期間内にエンコーダ10の出力信号が変化しないときはエンコーダ10内部の光学センサの異常と判断して安全遮断信号を出力する。
(もっと読む)
電動機制御装置
【課題】 電動機のフィードバック制御部での制御パラメータの自動調整機能を有した好適な電動機制御装置を提供する。
【解決手段】 位置制御部11と速度制御部21とノッチフィルタ部32と電流制御部41とからなる電動機制御装置3において、応答状態測定部71では制御パラメータ調整部72での位置制御部11および速度制御部21の制御パラメータの変更に伴って、電動機6の回転速度などの発振状態を監視し、また、制御パラメータ調整部72では前記制御パラメータを再設定して電動機6を駆動するという作業を前記発振状態が無くなるまで行った後は、このときの前記制御パラメータを保持させる動作を行っている。また、機械振動検知部73は上述の設定動作のたびに電動機6の回転速度などの振動状態を監視し、振動状態を検知した場合には、ノッチフィルタ調整部74において、その振動周波数を検知し、検知した振動成分を減衰させるようにノッチフィルタ部72のノッチ周波数を設定する動作を行うようにしている。
(もっと読む)
モータ制御装置および方法
【課題】車両の条件に応じてCVVLシステムの空気量制御およびエンジン性能を定義するバルブリフトの制御を実行するためのモータ制御装置および方法を提供する。
【解決手段】本発明のモータ制御装置は、バルブリフト測定値とバルブリフト目標値を用いて可変バルブリフト装置制御のためにモータへの制御有無を決定し、モータを制御するためにバッテリ電圧と予め定められた基準電圧範囲を比較し、バッテリ電圧が基準電圧範囲に含まれる場合にバッテリ電圧に対応する電圧因子を決定した後、予め定められた基準信号値に電圧因子を適用してモータに対する駆動信号値を決定する。
(もっと読む)
モータ制御回路
【課題】簡素なデジタル回路を用いて構成され、広範な制御レンジでゲインを調整可能なモータ制御回路を提供する。
【解決手段】モータ駆動制御部90は、トルク指令データと第3の基準クロックとに応じて、モータ100を駆動する。トルク指令データは、第1の基準クロックとFG信号とに応じて速度誤差検出部40が出力する速度誤差データと第2の基準クロックとFG信号とに応じて位相誤差検出部60が出力する位相誤差データとが加算回路80で加算されて生成される。速度誤差データ及び位相誤差データは、それぞれ、速度検出用値設定部51及びカウント値設定部53、又は位相検出用値設定部71及びカウント値設定部73により設定される所定の範囲で出力される。第3の基準クロックの周波数を固定したままの広範な制御レンジで、第1及び第2の基準クロックの周波数を調整することによって、制御ゲイン及び制御範囲を設定できる。
(もっと読む)
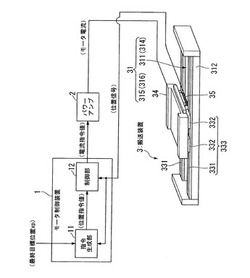
アクセルペダル装置
【課題】アクティブ制御機構の駆動源としてトルクモータを用いても、トルクモータの回動角度を検出する手段を設けることなく、確実にトルクモータを制御することができるアクセルペダル装置を提供する。
【解決手段】アクセルペダルの操作に対して操作反力を付与するトルクモータ31と、アクセルペダルのアクセル開度を検出し、当該アクセル開度を上位装置であるECU50に出力するAPS(アクセルペダルポジションセンサ)15と、トルクモータ31の駆動を制御して操作反力を付与するコントロールユニット40とを備えるアクセルペダル装置10であって、コントロールユニット40はECU50から操作反力の付与を指令されると、アクセル開度に基づいてトルクモータ31の駆動を制御して操作反力を付与する。
(もっと読む)
送風装置用制御回路及びそれを用いた送風装置
【課題】ホール素子に対する駆動ICのノイズの影響を小さく抑え、ホール素子が高精度に動作することで回転数及び風量を適切に制御することを目的とする。
【解決手段】ブレードを回転させて風を発生させる送風装置に備えられる送風装置用制御回路であって、基台上に設けられた絶縁層74と、絶縁層74上に設けられた第1の導電部材72aと、絶縁層74上に設けられ、第1の導電部材72aとは離れて設けられた第2の導電部材71aと、第1の導電部材72aに接続された、ブレードの回転を制御する駆動IC72と、第2の導電部材71aに接続された、ブレードの回転を検知するホール素子71と、を備え、第1の導電部材72a及び第2の導電部材71aはグランドに接続され、第1の導電部材72aと第2の導電部材71aとは、ワイヤで接続されていることを特徴とする送風装置用制御回路とする。
(もっと読む)
適応ノッチフィルタ、及びノッチフィルタのパラメタ調整方法
【課題】十分な位相余裕が確保されるようにノッチフィルタのノッチ幅を調整する。
【解決手段】適応ノッチフィルタは、ノッチフィルタと、該ノッチフィルタの幅を表すパラメタを調整するパラメタ調整部と、を備える。パラメタ調整部は、パラメタの候補値よりも広い幅を表す値を試行し、検出された振動が試行期間の完了まで基準内に収まっている場合にパラメタを候補値に設定する。検出された振動が基準を超えた場合に試行を中断して前記パラメタを試行前の値に戻してもよい。
(もっと読む)
部品実装装置および部品実装装置におけるモータ制御方法
【課題】過負荷状態の確実な防止と動作効率の維持向上を両立させることができる部品実装装置および部品実装装置におけるモータ制御方法を提供すること。
【解決手段】モータの負荷状態を負荷検出部によって検出して監視し、負荷率が当該モータの定格負荷に基づいて予め設定された基準負荷率を超えた場合には、負荷率が予め設定された低減率Δp1で減少するようにモータの回転速度・回転加速度の組み合わせで規定される駆動パラメータを変更させる負荷低減処理を行い、負荷率が低減された状態で部品実装作業を継続実行する過程において、負荷率が基準負荷率を超える状態が発生しなかった場合には、負荷率が予め設定された回復率Δp2で段階的に増加するように駆動パラメータを変更する負荷率回復処理を反復して行い、負荷率が再度基準負荷率レベルを超えた場合には、直前の負荷率に戻してこの負荷率を確定駆動パラメータとして設定する。
(もっと読む)
撮像装置
【課題】カメラを冷却するファンモータを備えた撮像装置において、カメラの取付場所や周辺の部品組付状態等によってカメラの共振周波数が変化しても、ファンモータの回転振動によってカメラが共振することを確実に防止できるようにする。
【解決手段】実際のカメラ13の振動周波数を検出して、カメラ13の振動周波数がファンモータ14の振動周波数の整数倍(共振周波数)とならないように該ファンモータ14の回転速度(振動周波数)を調整する。ここで、カメラ13の振動周波数の検出方法は、ファンモータ14を回転させながらカメラ13で静止状態の被写体12を所定の撮像周期(所定時間間隔)で撮像して該被写体12のマーク12aの位置を認識する処理を繰り返すことで、該カメラ13の視野内で該被写体12のマーク12aが振動する周期Tを検出して該カメラ13の振動周波数を求める。
(もっと読む)
モータの駆動制御システムおよび駆動制御方法
【課題】位置検出データの転送誤りを敏速に検出することにより、初回稼動時から不用意な暴走を確実に防止する駆動制御システムを提供する。
【解決手段】位置検出器に位置データの監視機能をもたせ、位置検出器が保持した最新位置データと、サーボ制御装置から出力させた最新位置データのエコーバック信号とを比較判定して、差異があるときには駆動禁止状態に遷移して、駆動禁止信号をサーボ制御装置に出力する。サーボ制御装置では、駆動禁止信号を入力すると駆動禁止状態に遷移して、フィードバック用位置データを最新位置データから推定位置データに切替え、指令信号を運転指令から所定の停止制御指令信号に切替え、速度、トルクがゼロに下がるまでは駆動を継続しながらモータを停止させる。
(もっと読む)
101 - 120 / 1,199
[ Back to top ]