
Fターム[5H501GG06]の内容
Fターム[5H501GG06]に分類される特許
1 - 20 / 68
電力変換装置
回転機の制御装置
モータを制御するための方法およびシステム
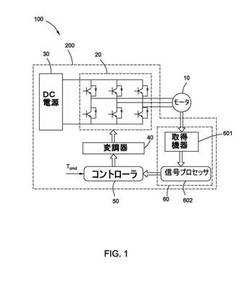
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
回転電機制御システム

【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、予め設定されたPWM条件下で電流フィードバックを用いるPWM制御方式でインバータ16を制御する制御部18とを含む。制御部18は、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、PWM制御で電流フィードバックを行う場合のフィードバックゲインを、通常時に使用する通常時ゲインよりも低下させるゲイン低下部であるゲイン決定部30を有する。
(もっと読む)
回転機の制御装置
【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
モータ制御装置およびこれを備える電動パワーステアリング装置
【課題】算出するモータの抵抗値と実際のモータの抵抗値との差をより短い期間で小さくすることのできるモータ制御装置、およびこれを備える電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、ステアリングの操舵状態が保舵状態のとき、過去に算出したモータ抵抗値Rmに応じて算出されるフィルタ値Rfを用いたフィルタ処理により、モータ抵抗値Rmを算出する。また、前回の保舵状態において算出したフィルタ値Rfである前回フィルタ値Rfoldを今回の保舵状態において算出されるモータ抵抗値Rmに反映する補正係数Gを、回転状態のときの電流積算値に基づいて変更する。
(もっと読む)
ショベル
【課題】電動発電機の異常をより柔軟に検出可能なショベルを提供すること。
【解決手段】本発明に係るハイブリッド式ショベルは、エンジン11により発電機として駆動される電動発電機12を備えるショベルであって、電動機として機能する電動発電機12の入力を表す入力物理量を取得する入力物理量取得部300と、入力物理量取得部300が取得する入力物理量に対応する、電動機として機能する電動発電機12の出力を表す出力物理量を取得する出力物理量取得部301と、出力物理量に対する入力物理量の割合に基づいて電動発電機12の異常を検出する電動発電機異常検出部302とを備える。
(もっと読む)
出力電流および出力電圧の測定に基づくトルクオブザーバ
【課題】電力変換器により給電される車両用3相駆動電動機のトルクを推定するための方法であって、3つの相線路が電力変換器から駆動電動機に導くことによって、車両用駆動電動機のトルクを確実に推定する。
【解決手段】3つの相線路6,7,8のうち少なくとも2つの相線路においてそれぞれ電流i1,i2,i3が測定され、3つの相線路6,7,8においてそれぞれ電圧u1,u2,u3が測定される。測定された電流又は測定された電圧から回転磁界周波数がが求められる。最終的に、測定された電流と、測定された電圧と、求められた回転磁界周波数とからトルクが推定される。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】高トルク領域における制御応答性を適切に高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、フィードバック制御に加えてフィードフォワード制御を実行する。フィードフォワード制御に用いられるフィードフォワードゲインは、交流電動機M1の状態に応じて可変に設定される。
(もっと読む)
交流電動機の制御装置および制御方法
【課題】全体的な制御安定性を確保した上で、高トルク領域における制御応答性を高めることが可能な交流電動機制御を実現する。
【解決手段】インバータ14は、矩形波電圧制御モードでは、制御装置30からの制御信号S3〜S8に応答して、電力線7上の直流電圧を、矩形波電圧に変換して交流電動機M1へ印加する。制御装置30は、交流電動機M1の出力トルクがトルク指令値Tqcomと一致するように、矩形波電圧の位相を制御する。制御装置30は、交流電動機のトルクが高トルク領域にある場合には、トルクが非高トルク領域にある場合と比較して、トルクの制御応答性を高めるように、矩形波電圧の位相を制御する。
(もっと読む)
回転機の制御装置
【課題】予測電流ide,iqeと指令電流idr,iqrとの差が所定範囲内となることで現在の操作状態を維持する場合、モータジェネレータ10の電流を急激に変化させる操作状態が採用されているおそれがあり、これにより所定範囲内に留まる期間が短くなること。
【解決手段】予測電流ide,iqeと指令電流idr,iqrとの差が閾値以下且つ規定値以上である相対速度評価領域内にある場合、予測電流ide,iqeの変化速度を小さくする操作状態への変更を検討する。これにより、規定値以下の領域に留まる時間を伸長させることができ、ひいては高調波電流を抑制しつつもスイッチング状態の切替頻度を低減することができる。
(もっと読む)
回転機の制御装置
【課題】直流交流変換回路のスイッチング素子をオン・オフ操作することで回転機を流れる電流、トルク、および磁束の少なくとも1つを有した制御量を制御する新たな回転機の制御装置を提供する。
【解決手段】予測部33によって予測された予測電流ide,iqeのベクトルと、指令電流のベクトルidr,iqrとの差の内積値にオフセット値Δを加算したものである評価関数Jを最小とする操作状態(電圧ベクトル)が、インバータIVの操作状態として決定される。矩形波制御時においては、トルクフィードバック制御によって定まる位相に応じた操作状態以外の評価関数Jにおけるオフセット値Δを増大させる。
(もっと読む)
回転機の制御装置
【課題】ブートストラップ回路を用いたシステムにおいて、モデル予測制御を適用する場合、高電位側のドライブユニットの電源となるコンデンサの電圧が低下することで、高電位側のスイッチング素子を適切に駆動することができなくなることを防止する。
【解決手段】制御装置20は、モデル予測制御によって、インバータINVの8通りの操作状態のうち、制御量とその指令値との差を最小とする操作状態を選択し、これに基づき、インバータINVを操作する。ただし、コンデンサCu,Cv,Cwの中に電圧が過度に低下するものがある場合、強制的にスイッチング素子Sun、Svn,Swnをオン状態とする。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、その抵抗値を精確に算出することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、電流値Imおよび電圧値Vmに基づいて外乱オブザーバにより推定誘起電圧EXaを算出する。そして、推定誘起電圧EXaが所定範囲内にあるとき電流値Imおよび電圧値Vmに基づいて抵抗値を算出する。さらに、最後に取得した電圧値Vmよりも前に取得した電圧値Vm(過去電圧値)および最後に取得した電流値Imよりも前に取得した電流値Im(過去電流値)に基づいて外乱オブザーバの演算式を補正する。
(もっと読む)
回転機の制御装置
【課題】電流センサに誤差がある場合、電流センサによる検出値を電流の初期値として用いることでモデル予測制御の制御性が低下すること。
【解決手段】指令電流idr,iqrおよび電気角θは、モデル予測制御部30の入力となる。モデル予測制御部30では、これら入力パラメータに基づき、インバータIVの操作状態を規定する電圧ベクトルViを決定し、操作部26に入力する。操作部26では、入力された電圧ベクトルViに基づき、上記操作信号を生成してインバータIVに出力する。モデル予測制御部30では、操作状態決定部34において、指令電流idr,iqrと予測電流ide,iqeとの乖離が小さいものに対応する電圧ベクトルViを選択する。ここで、予測電流ide,iqeの算出に際して用いる電流の初期値を、前回の予測電流ide,iqeとする。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10では、トルク軸電圧が印加されているにも関わらず、トルク軸電流が第1閾値以下の状態において、相間電圧がゼロボルト近傍になっている組合せの相以外の相を異常相として検出する。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
位置・速度センサレス制御装置
【課題】 速度推定部における推定誤差を低減し、推定ゲインを高くすることにより、応答性のよい位置・速度センサレス制御装置を提供する。
【解決手段】 実施形態に係る位置・速度センサレス制御装置は、インバータへの出力電圧指令を演算する出力電圧指令演算手段9と、前記出力電圧指令に基づきゲート信号を生成するゲート生成手段11と、交流電動機7に流れる電流を検出する検出手段6と、第1の周期を有する第1制御割り込みの各区間におけるインバータ出力電圧平均値を区間平均電圧として演算する平均電圧演算手段17と、前記検出手段6にて検出された電流値及び前記平均電圧演算手段17にて演算された区間平均電圧に基づき、前記交流電動機7の回転速度を推定する処理を、前記第1制御割り込みのタイミングで行う速度推定手段13とを具備する。
(もっと読む)
電動パワーステアリング装置
【課題】新たに設定されるモータ抵抗と実際のモータの抵抗との乖離を小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、操舵系にアシスト力を付与するモータを備え、このモータの抵抗を示す値であるモータRm抵抗を更新する。具体的には、モータの誘起電圧EXが第1判定値GAよりも小さいことに基づいて、モータ抵抗Rmを更新する。また、誘起電圧EXが第2判定値GBよりも小さいとき、モータ電圧Vmをモータ電流Imにより除算した値である除算値を新たなモータ抵抗Rmとして設定する。
(もっと読む)
1 - 20 / 68
[ Back to top ]