
Fターム[5H501JJ23]の内容
Fターム[5H501JJ23]に分類される特許
1 - 20 / 132
電力変換装置
電動機制御装置
モータを制御するための方法およびシステム
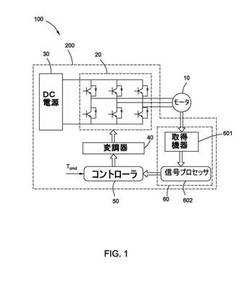
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
回転機の制御装置

【課題】電流センサの出力値に実際の電流の振幅に対して所定の比率(≠1)だけ相違する誤差であるいわゆるゲイン誤差が含まれる場合、これに起因してモデル予測制御の制御性が低下するおそれがあること。
【解決手段】偏差算出部40,44では、予測電流ide,iqeのそれぞれと同位相の実電流id,iqとの差が算出される。フィードバック制御部42,46のそれぞれでは、偏差算出部40,44の出力値をゼロにフィードバック制御するための操作量(補償量idcomp,iqcomp)が算出される。これら補償量idcomp,iqcompによって、予測部33によって予測される予測電流ide,iqeが補正される。
(もっと読む)
建設機械
【課題】電子制御系の異常判定に係る誤判定及び検出漏れの発生を抑制できる建設機械を提供すること。
【解決手段】旋回体と、旋回体を駆動する電動モータと、操作信号を操作量及び操作方向に応じて出力する操作装置と、操作信号に基づいて生成された制御信号に基づいて電動モータを制御するインバータ装置と、電動モータの速度を検出するための位置センサと、制御信号が規定する電動モータの速度指令V*から速度Vを減じた値の符号と、電動モータの加速度の符号とが異なる状態を第1条件とし、速度指令と速度の偏差が基準値Vthより大きく、かつ、加速度が基準値βthより大きい状態を第2条件としたとき、第1条件及び第2条件のうち少なくとも一方が成立するか否かを判定する第2コントローラとを備える。
(もっと読む)
電動モータの制御装置およびその制御方法
【課題】加速性も含めた作業操作上の違和感を低減すること。
【解決手段】作業モードを設定するモード切替部と、設定される作業モードによって予め設定される電動モータの最大出力を取得する作業モード・旋回最大出力変換テーブルTB11と、電動モータの回転速度を検出する回転センサと、前記回転速度と前記最大出力とをもとにトルク制限値Tlimを演算するトルク制限値演算部105と、前記電動モータの加速時に、トルク制限値Tlimによって前記電動モータのトルクを制限するトルク制限手段と、を備える。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】モータや被駆動体の仕様の変更等に応じてモータの制御情報を容易に変更でき、利用者のニーズに応じて制御情報の設定をカスタマイズ可能な汎用性を持ったモータ制御装置及び画像形成装置を提供する。
【解決手段】モータ制御装置の記憶媒体11は、制御ゲインを書き換えるための外部入力データに基づいて制御ゲインを自在に書き換え可能な書き換え可能領域12と、外部入力データに基づく書き換えが禁止又は条件付きで許容された書き換え不可能領域13とを有する。また、外部入力データに基づいて、記憶媒体11の書き換え可能領域12に記憶されている制御ゲインを書き換えるモータ制御IC14を備える。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵トルクに対して電流指令値が零に設定される不感帯が適正に設定できない場合でも、モータ電流零の状態を検出してモータ電流検出値のオフセット誤差を補正する電動パワーステアリング装置の制御装置を提供する。
【解決手段】電流指令値I、操舵トルクT、及び操舵速度Vを読み込み、操舵トルクTと電流指令値のコラム軸換算トルクTec(Tec=I×Kt ×G)との和P(P=T+Tec)を演算(P11、12)、値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)か否かを判定し、(P<Tfc)の場合はモータ電流零と見なせる状態が検出されたものと判定、その時点で検出されたモータ電流検出値iをオフセット補正値としてオフセット誤差の補正演算を行う(P13、15)。値Pがコラム軸換算摩擦トルクTfc未満(P<Tfc)でない場合はオフセット誤差の補正演算を中止する(P16)。
(もっと読む)
モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システム
【課題】特性の異なる複数の種類のモータに対しても、信頼性高く良好に適用可能であり安定してモータを駆動できる、モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システムとを提供することを目的とする。
【解決手段】駆動対象となるモータへの出力電流リップルを検出する出力電流リップル検出部と、出力電流リップル検出部が検出した出力電流リップルに対応して、モータへの出力電流を制御する制御特性を変更するPID制御部と、PID制御部から出力信号が入力されて、PWM制御を遂行するPWM制御部と、PWM制御部から出力されるPWM信号に対応してスイッチング素子のオン・オフが制御されるフルブリッジ回路とを備えるモータ駆動装置とする。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】一定期間、予め設定されたトルクを出力させて、モータを目標停止位置に停止させることができるモータ制御装置及びモータ制御方法を提供する。
【解決手段】モータ制御装置10は、トルク指令に基づいて、モータMを駆動する電流を出力する電力変換部12と、モータMの速度指令とモータMのモータ速度との偏差に基づいて、トルク指令を生成する速度制御部14と、モータMの速度制御中に、モータMのモータ位置を検出する位置検出器PGの1回転当たりの基準位置を最初に検出した後、モータMを位置制御する定位置停止制御部20とを備える。
(もっと読む)
デジタル制御式モータ及びこれを用いた画像形成装置
【課題】装置内のモータ動作司令部に送るモータ制御ゲイン値が装置のモータ交換の度に自動的に適した値に書き換わり、反映させることができるデジタル制御式モータ及びこれを用いた画像形成装置を提供することを目的とする。
【解決手段】デジタル制御式モータ及びこれを用いた画像形成装置のモータ101は、外部からアクセス可能な記憶領域が設けられたモータ用記憶媒体(記憶媒体A)102を有し、モータ用記憶媒体(記憶媒体A)102の記憶領域にモータ制御ゲイン値を記憶させている。
(もっと読む)
指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置
【課題】少ない演算量で機械の振動を抑制することが可能な指令発生装置の設計方法、指令発生装置の製造方法、指令発生方法、指令発生装置、モータ制御装置の製造方法、及びモータ制御装置を提供する。
【解決手段】指令発生装置20の設計方法は、関数a(t)を設定するステップと、関数a(t)をラプラス変換して関数A(s)を求めるステップと、極を定める減衰係数がそれぞれ0、かつ極を定める固有角周波数が、それぞれ関数a(t)に含まれるパワーが0の異なる周波数ωsであり、零点が、それぞれ複数の振動成分をもつシステムの各振動極であり、定常ゲインがそれぞれ1となる複数の2次の伝達関数G1(s)〜Gn(s)(nは自然数)を設定するステップと、関数A(s)と伝達関数G1(s)〜Gn(s)とを乗じて関数Fb(s)を求めるステップと、関数Fb(s)を逆ラプラス変換して関数fb(t)を求めるステップとを含む。
(もっと読む)
モータ駆動装置の位置制御方法
【課題】位置比例積分制御系は、位置偏差の定常偏差を0にする利点があるが、モータ位置が指令位置を追い越すオーバーシュートがおきやすい欠点がある。
【解決手段】位置指令1とモータ位置2の差から位置偏差3を算出し、これに位置比例ゲイン4を乗じた位置比例出力5を計算する位置比例制御系に、速度制御指令8を速度制御モデル15に通したモデル出力16と、モータ位置2を速度検出器13で微分したモータ速度14の差をとり、一次遅れフィルタ17を通した出力を、再び速度制御指令8に加算する速度誤差補正機能を備える。
(もっと読む)
制御弁の制御装置
【課題】電動アクチュエータから制御弁に付与される駆動力が微小変動するような状況を少なくし、電動アクチュエータの構成部品の磨耗や劣化の進行を抑制する。
【解決手段】電動アクチュエータ12によって駆動される制御弁10は所定の開度に付勢されている。その開度を制御する制御ユニット21は、制御弁10の目標開度と検出された開度との偏差に応じてアクチュエータ12を操作する。該偏差の絶対値が所定値よりも小さいという条件を少なくとも含む所定の必要条件が成立している場合に、アクチュエータ11への電源供給を遮断し、目標開度又は検出された開度と上記所定の開度との偏差の絶対値が所定値以上である場合には、アクチュエータ11の電源供給を継続する。
(もっと読む)
モータ制御装置
【課題】制御遅延や電流応答遅延が発生しても遠心力低減効果が低下せず、適切な軸位置指令値を求めるのに大きな負担を必要としないモータ制御装置を提供する。
【解決手段】振れ回り抑制制御部30において、ローパスフィルタLPFによって軸変位検出値dqから軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50によって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値α*,β*を演算する。そして、前記振れ回り抑制制御部30で演算された軸変位指令値α*,β*を軸支持制御部20に入力する。
(もっと読む)
モータ制御装置
【課題】複数のユニットを有するモータ制御装置において、大きな負担を必要とせずに、モータ軸の振れ回りを抑制する。
【解決手段】軸変位検出値α1,β1,α2,β2から、軸変位検出値の並進運動成分αp,βpと回転運動成分αr,βrとを求め、前記並進運動成分αp,βpと回転運動成分αr,βrのそれぞれについて、ローパスフィルタLPF1によって、軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50a,50bによって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*を演算する。そして、軸支持制御部20において、軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*に基づいて、各モータの軸変位指令値を算出する。
(もっと読む)
摩擦補償方法、モータ制御方法、摩擦補償装置、及びモータ制御装置
【課題】運動する物体の温度及び速度又は角速度変動に対応した摩擦損失補償の手法及び構成を提供する。
【解決手段】摩擦補償装置20は、温度別に測定された制御対象の速度又は角速度と駆動電流値との関係式で導出された摩擦損失推定関数の関数保持部22を有する。摩擦損失推定関数は、速度又は角速度に依存する第1の項の係数として温度を変数とする第1の関数と、第2の項として温度を変数とする第2の関数を含む。摩擦補償装置20は、ある時刻の速度又は角速度と温度とを受け取る入力部と、入力された速度又は角速度と前記温度とに基づいて、第1の項を計算して粘性抵抗補償値を算出する粘性抵抗補償演算部24と、入力された速度又は角速度と前記温度とに基づいて、第2の項を計算してクーロン摩擦補償値を算出するクーロン摩擦補償演算部25と、粘性抵抗補償値24とクーロン摩擦補償値とを合算して摩擦損失補償電流を算出する加算器28を含む。
(もっと読む)
サーボ制御器
【課題】2自由度制御構成のサーボ制御器において、用いる位置検出器の分解能が低くてもフィードフォワード制御器からフィードバック制御器へ与える操作量に生ずるリップルを確実に低減でき、高い追従性による高精度制御を可能にするサーボ制御器を得ること。
【解決手段】指令生成器10は入力される位置指令Aをコントローラ2の分解能から位置検出器5の分解能よりも高い分解能の内部位置指令150へ変換する。フィードフォワード制御器11aは、内部位置指令150を元に微分器110、フィルタ111を用いて速度フィードフォワード成分152を生成し、それを元に微分器112、フィルタ113を用いてトルクフィードフォワード成分154を生成する。内部位置指令150の分解能は位置検出器5の分解能よりも高いので、フィードフォワード成分152,154に生ずるリップルは位置検出器5の分解能を有する内部位置指令を用いる場合よりも低減される。
(もっと読む)
流量を推定するためのPAP装置でのモータ速度の使用
【課題】PAP治療中に、PAP装置を通じた空気流量を決定するための方法及び装置を提供する。
【解決手段】ブロワ6の実際の速度が測定される。所望の速度に近づくため或いは所望の速度を維持するために実際の速度において必要とされる所望のモータ電流I_DESが実際のモータ速度RPM_ACTとともに流量推定アルゴリズムで使用されて、PAP装置を通じた流量が決定される。流量推定アルゴリズムは2次元ルックアップテーブルから成り、この場合、入力は所望のモータ電流及び実際のモータ速度であり、出力はPAP装置を通じた流量とする構成とする。
(もっと読む)
回転機の制御装置および回転機の制御システム
【課題】回転数および電圧値が変化しても、従来よりもトルク応答性を向上させる。
【解決手段】回転機(電動機50等)の制御装置20において、電動機50の回転数Nおよび電力変換回路40に入力する電圧値Vdcに基づいて制御ゲインを設定するゲイン設定器23と、少なくとも積分要素を含み、トルク指令T*とトルクとの偏差とゲイン設定器23で設定される制御ゲインとに基づいてフィードバック制御を行い電力変換回路40が出力する電圧の位相を示す電圧位相指令θ*を出力するフィードバック制御器24と、フィードバック制御器24から出力される電圧位相指令θ*に基づいてスイッチング素子の制御を行う制御信号Scを生成して電力変換回路40に出力するスイッチング信号生成器25とを有する構成とした。回転数Nや電圧値Vdcが変化しても適切な制御ゲインが設定され、トルク応答性が向上する。
(もっと読む)
1 - 20 / 132
[ Back to top ]