
Fターム[5H501MM15]の内容
電動機の制御一般 (20,975) | 保護、補償、監視、表示 (962) | 電源電圧変動に対するもの (36)
Fターム[5H501MM15]に分類される特許
1 - 20 / 36
信号伝達装置及びこれを用いたモータ駆動装置
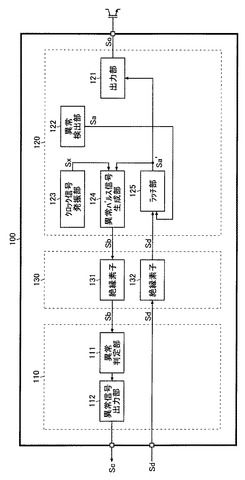
【課題】ドライバチップの異常検出期間が短過ぎると、異常パルス信号のパルス生成が停止された後、異常判定期間の経過前に異常パルス信号のパルス生成が再開されてしまい、コントローラチップでドライバチップの異常を認識することができなくなるおそれがあり、2つの回路を絶縁しつつ一方の異常を確実に他方に伝達することのできる信号伝達装置、及びこれを用いたモータ駆動装置を提供する。
【解決手段】信号伝達装置100は、第1回路110と第2回路120との間を絶縁しながら信号伝達を行うものであり、第1回路110は、第2回路120から伝達される異常パルス信号Sbを監視して第2回路120の異常有無を判定し、第2回路120は、第2回路120で異常が検出されてから少なくとも第1回路110で第2回路120の異常有無が判定されるまで異常パルス信号Sbを異常状態に保持する。
(もっと読む)
電気推進システムにおける電動機制御方法

【課題】蓄電池とこの蓄電池を充電する発電機からなるハイブリッド電源を備えた電気推進システムにおいて、蓄電池電圧,電動機受電端電圧の異常低下を簡単かつ低コストに防止する。
【解決手段】電動機(M)6の入力電圧VMを検出器(VD)9により検出し、これが予め設定された制限開始設定電圧VMAを超えたら、予め設定されている回転速度(入力電流)制限線Yをもとに、速度指令制限部13により回転速度(入力電流)制限線を超えない回転速度を求め、これをもとに回転速度を制限して電動機(M)6を運転することで、掲記課題を装置の小型化,軽量化およびコストダウンにより実現する。
(もっと読む)
電動コンプレッサ
【課題】電源接続の解除を検知するまでの時間を短縮し、コンデンサの残留電圧による感電を防止する電動コンプレッサを提供する。
【解決手段】高電圧電源140と接続する電源コネクタ130とパワー素子118との間を接続する電源ライン111の電源供給ライン111aに一端が設けられ、グランドライン111bに他端が設けられたコンデンサ114に対して、電源コネクタ130側の電源供給ライン111aに、高電圧電源140からパワー素子118の方向へ流れる電流を正とし、逆方向に流れる電流を負として検出する電流検出部113を設け、電流検出部113と電源コネクタ130との間に電源供給ライン111aとグランドライン111bとを直結する負荷抵抗112を設ける。制御部116は、電流検出部113によって検出された電流値が0未満になると、高電圧電源140の接続が解除されたと検知する。
(もっと読む)
モータ制御装置
【課題】モータの電源電圧の変動等が要因となって、スイッチト・キャパシタ・フィルタのような抽出回路がリプル成分を正確に抽出しなくても、抽出されなかったリプル成分のパルス数を補足できるようにする。
【解決手段】モータ制御装置1が、モータ2と、モータ2の電流信号のリプル成分をパルス信号に変換する抽出回路と、モータ2の電圧を検出するA/Dコンバータ7と、パルス信号を入力する制御部4と、を備える。制御部4が、A/Dコンバータ7によって検出された電圧の変動を検出した場合に、電圧変動の直前の一パルス分又は複数パルス分のパルス周期T_beforeと、電圧変動から所定期間t経過後の一パルス分又は複数パルス分のパルス周期T_afterとの平均周期T_averageを算出し、所定期間tを平均周期T_averageで除して得られる商nを算出する。
(もっと読む)
交流電源の電源特性に応じてモータの出力を制限するモータ駆動制御装置
【課題】モータに電力を供給する交流電源の電圧低下による悪影響が及ぼされないモータ駆動制御装置を提供する。
【解決手段】制御パラメータ決定部10は、モータ3の駆動中に交流電源2の電圧Vminが目標値Vlowより下であるか否かを、交流電源2の電圧特性に基づいて判断し、交流電源2の電圧Vminが目標値Vlowより下であると判断した場合、交流電源2の電圧Vminが目標値Vlowとなるモータ3の出力の制限値を演算し、モータ3の出力をモータ3の出力の制限値以上に制限する制御パラメータCpを設定し、制御パラメータCpを、駆動制御部7が指令値Iを決定するために駆動制御部7に供給する。
(もっと読む)
サーボアンプの制御ループゲイン調整方法、プログラム及びロボット制御装置
【課題】ロボット動作中のサーボアンプの電源電圧の変動に対して簡易な制御で制御ループを安定化させる。
【解決手段】ロボットの各関節に設けられたサーボモータに対して外部からの制御指令に応じた該サーボモータの制御量を帰還させて制御ループを形成するサーボアンプの制御ループゲイン調整方法であって、前記制御ループゲインのデフォルト値及び前記サーボアンプの電源電圧のデフォルト値に基づいて、前記制御ループを形成するとともに前記サーボモータの駆動を開始する工程と、前記サーボアンプの電源電圧を検出する工程と、前記制御ループゲインを構成する制御ゲインのうち前記サーボアンプの電源電圧と相関して変化する制御ループゲインを、検出した前記サーボアンプの電源電圧の変化に対して逆方向に変化するように調整する工程と、を備える。
(もっと読む)
モータ制御装置および方法
【課題】車両の条件に応じてCVVLシステムの空気量制御およびエンジン性能を定義するバルブリフトの制御を実行するためのモータ制御装置および方法を提供する。
【解決手段】本発明のモータ制御装置は、バルブリフト測定値とバルブリフト目標値を用いて可変バルブリフト装置制御のためにモータへの制御有無を決定し、モータを制御するためにバッテリ電圧と予め定められた基準電圧範囲を比較し、バッテリ電圧が基準電圧範囲に含まれる場合にバッテリ電圧に対応する電圧因子を決定した後、予め定められた基準信号値に電圧因子を適用してモータに対する駆動信号値を決定する。
(もっと読む)
自動製パン器
【課題】モータの異常を精度よく検知し得る自動製パン器を提供する。
【解決手段】自動製パン器は、原動軸に回転動力を付与可能な粉砕モータ60と、粉砕モータ60を駆動するための電力を供給する電源部121aと、電源部121aの状態を検知する電源状態検知回路125と、粉砕モータ60の異常を検知する制御装置120と、を備える。制御装置120は、電源部121aの状態によって異なり得る基準を用いて、粉砕モータ60の異常を検知する。
(もっと読む)
負荷制御装置
【課題】ダイオードの順方向電圧の変動によるダイオードのカソードの電位の変動を抑制する負荷制御装置を提供する。
【解決手段】出力回路11は入力された指令値を変数とする関数に従って第1電位をダイオードD10のアノードに印加する。指令出力部10は基準指令値から第1補正値を減算して第2補正値を加算して指令値を求める。基準指令値は、所定温度下及び所定電流が流れる状況下での、ダイオードD10のアノードの第1電位とカソードの第2電位との差である基準両端電圧と、負荷の制御とに基づいて設定される。第1補正値は基準両端電圧から関数の逆関数に従って求められる指令値の差分である。第2補正値は、電圧検出部101によって検出された第1電位から逆関数に従って求められる指令値と、電圧検出部101によって検出された第2電位から逆関数に従って求められる指令値との差分である。
(もっと読む)
ドライブ回路
【課題】電源電圧の変動によるモータ出力の変動を抑制する。
【解決手段】コンパレータCOMP10は、PWMキャリア周波数の三角波と、しきい値電圧を比較して、しきい値電圧に応じたデューティー比のPWM信号を発生する。このPWM信号により複数のトランジスタをスイッチングすることで、電源からの駆動電流をモータへ出力する。そして、前記しきい値電圧を前記電源の電圧に応じて変化させることで、電源電圧に応じてPWM信号のデューティー比を変更することができる。
(もっと読む)
モータ装置及び電動工具
【課題】使用環境温度が変化しても、作動可能範囲を安定して確保することができるモータ装置を提供する。
【解決手段】2次電池からの電力供給を受けて作動する電動モータと、2次電池の電圧を検出する電圧検出手段と、電圧検出手段による2次電池の検出電圧と判定値との比較に基づいて異常判定を行う判定手段と、判定手段の判定結果に対応する制御を含む電動モータの作動制御を行う制御手段とを備えたモータ装置であって、制御回路にて実施される2次電池の異常判定は、検出した使用環境温度に応じた判定値V1,V2のいずれかに変更して実施される。
(もっと読む)
電動オイルポンプの制御方法及び制御装置
【課題】電動オイルポンプを駆動する電動機への入力電圧が変動しても、安定してトランスミッション内にオイルを供給することができる電動オイルポンプの制御方法を提供する。
【解決手段】この発明による電動オイルポンプの制御方法は、アイドルストップによりエンジンが停止しているときに、電動オイルポンプにより前記トランスミッション内にオイル圧力を発生させ若しくは前記トランスミッション内にオイルを満たすように駆動される電動オイルポンプの制御方法であって、前記電動オイルポンプを駆動する電動機は、前記電動機への入力電圧の変動に対して、前記電動オイルポンプによる前記トランスミッション内へのオイル供給量を一定に保つように制御されることを特徴とする。
(もっと読む)
モータ駆動装置
【課題】異常発生時の原因の切り分けを容易にする。
【解決手段】コンバータ12へ入力される交流電源の各相の電圧および電流を検出し、電源監視部24において最新のデータを一定期間にわたって記憶する。コンバータ12、インバータ16またはコントローラ22においてアラームが発生したら、その時に電源監視部24において記憶されているデータを記録部26に記録する。これを表示することにより、原因が電源14側にあるのかモータ駆動装置10側にあるのかの切り分けが容易になる。
(もっと読む)
モータ巻線焼損保護装置
【課題】
サーミスタやサーモスタット等の温度検出器を用いず,途中で電源を落としてしまった場合や電源が変動した場合でも正確なモータ巻線焼損保護を低コストで行なう。
【解決手段】
本モータ巻線焼損保護装置は,主回路電圧を検出する検出手段と,モータに流れる電機子電流を検出する検出手段と,モータ速度を検出する検出手段と,上記検出手段により得られた主回路電圧,モータ電流及びモータ速度に基づいてモータの巻線抵抗を演算するモータ巻線抵抗演算手段と,モータ巻線抵抗からモータ巻線温度を演算するモータ巻線温度演算手段とを備え,モータ巻線温度演算結果が所定の閾値を超えた場合にモータへの電源供給を停止し,モータ巻線の焼損するのを防止する事を特徴とする。
(もっと読む)
交流機制御装置
【課題】バッテリを有効に活用にすると共に、ハンチングを抑制してバッテリの保護範囲内において高い効率で交流機を力行及び回生させることが可能な交流機制御装置を提供する。
【解決手段】交流機が力行する際にインバータ回路を介して電力を供給すると共に、交流機が回生する際にインバータ回路を介して電力を受け取って蓄電するバッテリのバッテリ電圧VBと、所定の基準電圧VRとの差分eに基づいて、交流機が最大トルク制御により制御される際の要求トルクを調整して調整トルクを演算する調整トルク演算部8と、バッテリ電圧VBが、交流機が力行する際の所定の下限電圧以下となった場合及び交流機が回生する際の所定の上限電圧以上となった場合に、交流機の目標トルクを、要求トルクと調整トルクとの間で切り換える目標トルク切り換え部9とを備える。
(もっと読む)
モータ駆動システム
【課題】電圧変換装置の制御性を確保可能なモータ駆動システムを提供する。
【解決手段】モータ駆動システム100は、交流電動機M1と、交流電動機M1を駆動制御するインバータ14と、インバータ14への入力電圧VHを可変する昇降圧コンバータ12と、電圧指令値に対する入力電圧VHの偏差に応じて、入力電圧VHをフィードバック制御する制御装置30とを備える。制御装置30は、入力電圧VHの変動周波数を交流電動機M1の運転状態から推定するとともに、フィードバック制御における制御ゲインの周波数特性に照らして、推定した変動周波数での入力電圧VHの変動が大きいと予測される場合には、フィードバック制御における制御ゲイン、および交流電動機M1の駆動制御における制御応答性のいずれかを変化させる。
(もっと読む)
ロボット
【課題】直流電源装置から出力される直流電圧が異常であると判断するためのサンプリング数を増やすことなく、この直流電圧の異常を精度良く検出できるロボットを提供する。
【解決手段】第2の制御回路26は、エンコーダ12からのフィードバック値に基づくモータ11の現在の回転位置の回転位置指令値に対する偏差に基づいて第1の制御回路25による監視動作を制御する。第1の制御回路25は、この監視動作において、直流電圧Vdに応じた電圧Vdetを所定周期でサンプリングし、サンプリングにより取得した電圧値が所定回数連続して異常電圧値である場合に異常状態信号Sbを出力する。第2の制御回路26は、異常状態信号Sbが入力されると直流電圧Vdが異常であると判断する。
(もっと読む)
電力変換装置及びそれを搭載した空気調和装置
【課題】正弦波状の交流電圧よりも大きな実効値を出力可能に構成された電力変換装置において、過変調領域で入力電圧が急増した場合でも、インバータ回路での過電流の発生を抑えることのできる低コストで且つ簡単な構成を得る。
【解決手段】正弦波状の交流電圧よりも大きな実効値を出力する、いわゆる過変調制御を行うように、インバータ回路(4)内のスイッチング素子(4a)を制御手段(10)によって駆動制御する。この制御手段(10)が、上記過変調制御を行っているときに、インバータ回路(4)の入力電圧が増加しても該インバータ回路(4)で過電流が発生しないように、交流電圧の瞬時値の最大値の増加を制限する出力制限手段(12,13)を備えている構成とする。
(もっと読む)
車両のステアリング装置
【課題】 電源異常時に、安全性を重視しながら電源装置の延命を図る。
【解決手段】 アシスト制御部は、主電源が失陥している場合、上限電力設定マップを使って車速Vxに応じた電動モータの上限電力Pmax(Vx)を設定する。電動モータの上限電力Pmax(Vx)は、車速Vxが低下するにしたがって減少するように設定されている。そして、車両が停止した場合には、上限電力Pmaxをこの上限電力Pmax(Vx)からさらに漸減させて最終的にゼロにする。車両が発進した場合には、発進時からの経過時間にしたがって、上限電力Pmaxを上限電力Pmax(Vx)にまで増加させる。
(もっと読む)
ラジオコントロール用電圧低下防止装置
【課題】
模型電動カーなどのラジオコントロール装置は、走行用モーターやステアリングサーボの動作によりモーター速度制御装置で安定化された電圧が低下した場合、受信機が動作しなくなったり、ステアリングサーボの動作が遅くなることにより安定した操縦が困難になる。
【解決手段】
ラジオコントロール装置において、昇圧回路を搭載したことを特徴とする受信機及びサーボ用電圧低下防止装置である。または、モーター速度制御装置内に上記装置を設けたことを特徴とするラジオコントロール装置である。
(もっと読む)
1 - 20 / 36
[ Back to top ]