
Fターム[5H505AA19]の内容
交流電動機の制御一般 (51,584) | 用途 (3,022) | 電気車 (228)
Fターム[5H505AA19]に分類される特許
1 - 20 / 228
モータ制御装置
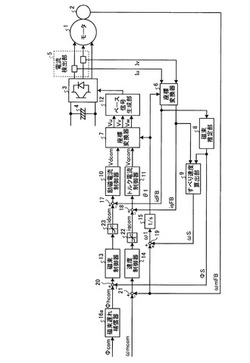
【課題】加速・減速や負荷トルク変動を含む広い動作領域で、磁束指令に対する磁束の追従遅れを補正し、所定のトルクを出力させ、加速性能および制御性能の向上が図れるモータ制御装置を得ること。
【解決手段】外部から入力される磁束指令Φcomと磁束推定部8が推定した推定磁束ΦSとの偏差が小さくなるようにする励磁電流指令を生成する磁束制御器13を備え、誘導モータ1をベクトル制御により駆動制御するモータ制御装置において、磁束指令Φcomに基づいて磁束遅れ補正指令Φhcomを生成する磁束遅れ補償器16aを設け、磁束遅れ補正指令Φhcomは、減算器20において磁束指令Φcomに代えて磁束推定部8が推定した推定磁束ΦSとの偏差を取るのに用いる。
(もっと読む)
同期機の磁極位置検出装置

【課題】直流電圧源の直流電圧の変動に拘わらず所望の磁極位置検出精度が得られる同期機の磁極位置検出装置を得ることを目的とする。
【解決手段】演算手段2aは、直流電圧源5の直流電圧の変動に拘わらず所望の磁極位置検出精度が得られるよう、パルス幅決定部22aにより直流電圧検出値Vdcに応じてパルス幅tpおよびパルス休止幅tnをtpおよびtnの関係式に基づき変化させるようにするとともに、サンプリングタイミングは直流電圧検出値Vdcに拘わらず各電圧ベクトルのパルス幅tp終端時点に固定するよう制御するようにした。
(もっと読む)
電力変換装置の制御装置
【課題】 インバータを利用したモータ駆動システムにおいて、同期PWMモードでのインバータの運転時に、トルク不足の問題を発生させることなく、モータの損失の増加を回避し、効率低下を抑える。
【解決手段】 インバータ制御部110は、インバータ40のスイッチング素子のON/OFF切替を行うためのゲート信号の生成モードとして、非同期PWMモードと同期PWMモードとを有する。直流電圧指令値演算部143は、インバータ制御部110が同期PWMモードでゲート信号を生成している場合に、インバータ40からモータ50に供給される電流のうちd軸電流が0または負になるように、DC−DCコンバータ20からインバータ40に供給する直流電圧を指示する指令値を演算する。
(もっと読む)
交流電動機の巻線切替装置及び交流電動機駆動システム
【課題】各電機子巻線に対する機能的悪影響を防止しつつ、2つの電機子巻線を円滑に切り替える。
【解決手段】インバータにより給電される3相交流モータ2に備えられた複数相の第1電機子巻線11及び第2電機子巻線12に係わる巻線切り替えを行う、交流電動機の巻線切替装置3であって、第1電機子巻線11と第2電機子巻線12とを直列に接続する接続導電路における当該第1電機子巻線11と第2電機子巻線12との間に配置され、第1電機子巻線11と第2電機子巻線12との間の電気的接続を遮断して第1電機子巻線11のみにインバータからの供給電力を導く第1状態と、第1電機子巻線11と第2電機子巻線12とを電気的に直列接続して第1電機子巻線11及び第2電機子巻線12の両方にインバータからの供給電力を導く第2状態とを、切替可能な、半導体スイッチ素子で構成する第1スイッチS1と第2スイッチS2を有する。
(もっと読む)
交流電動機の巻線切替装置及び交流電動機駆動システム
【課題】生産性の向上及び製造コストの低減を図る。
【解決手段】インバータにより給電される3相交流モータ2に備えられた3相の第1電機子巻線11及び第2電機子巻線12に係わる巻線切り替えを行う、3相交流電動機の巻線切替装置3であって、第1電機子巻線11及び第2電機子巻線12のうち第1電機子巻線11にインバータからの供給電力を導く第1状態と、第1電機子巻線11及び第2電機子巻線12の両方にインバータからの供給電力を導く第2状態とを、切替可能な、スイッチS1〜S6を有し、これらスイッチS1〜S6は、3相にそれぞれ対応した3つの絶縁ゲート型バイポーラ・トランジスタ素子からなるスイッチを2組備えるとともに当該2組のスイッチに含まれる6つの絶縁ゲート型バイポーラ・トランジスタ素子を一体化して構成された半導体モジュールを、少なくとも1つ有している。
(もっと読む)
モータドライブ装置
【課題】 可変磁力磁石の磁力を変化させるための磁化電流を低減することのできるモータドライブ装置を提供することにある。
【解決手段】 磁化特性Fimagが変化する可変磁力磁石41を備えた可変磁力メモリモータ2を備えた可変磁力メモリモータドライブ装置1であって、可変磁力磁石41の磁化特性Fimagを特定し、可変磁力メモリモータ2の回転数Nrに基づいて、磁化後の磁束目標値φ*を決定し、磁化特性Fimag及び磁束目標値φ*に基づいて、可変磁力磁石41に磁化電流Idを流すようにインバータ4を制御する。
(もっと読む)
発電電動機の異常検出装置および異常検出方法
【課題】発電電動機の駆動時および電力回生時において、発電電動機の絶縁抵抗を求めて、絶縁異常を検出することができる発電電動機の異常検出装置を提供する。
【解決手段】直流電源4から供給される電力をインバータ3で制御して駆動する発電電動機2の異常検出装置において、発電電動機2の電動機駆動母線6の零相電流を検出する零相電流検出手段12と、電動機駆動母線6を流れる電流の周波数を検出する周波数検出手段15と、直流電源4の電圧を検出する電圧検出手段14と、電動機駆動母線6の零相電流を発電電動機2の周波数で同期検波する同期検波手段13と、同期検波手段13の出力である漏洩電流値と直流電源4の電圧とから絶縁抵抗を算出して異常を検出する異常検出手段11とを備える。
(もっと読む)
電気車制御装置
【課題】粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる電気機関車の電気車制御装置を提供すること。
【解決手段】速度ゼロから切換速度に達するまでは速度センサ付ベクトル制御器CAによって加速制御を行い、これと併行して速度ゼロから速度センサレスベクトル制御器CBも動作させて主電動機1の電圧・電流から推定速度を演算する。この推定速度と速度センサ2から得た速度とから空転検知用速度演算器5により空転検知に用いる速度を演算し、この速度を各動輪速度とみなし、その最小値を基準速度に設定して各動輪速度の差速度によって空転検知器6により空転検知を行いながら加速制御を行う。この加速制御中の平均加速度と機関車の平均牽引力から牽引質量推定器9で牽引質量を推定し、閾値演算器8において空転検知の閾値を設定する。列車速度が切換速度以上になった後は、この閾値を用いて軸加速度による空転検知を行う。
(もっと読む)
電気機械装置
【課題】電気機械装置の効率的な制御を行う。
【解決手段】電機機械装置であって、電磁コイルと、前記電磁コイルにPWM駆動信号を供給するためのPWM駆動回路と、前記PWM駆動回路を制御する制御部と、を備え、前記制御部は、前記電磁コイルに前記PWM駆動信号を供給する区間としての励磁区間を設定する第1の制御と、前記PWM駆動信号のデューティ比を変更する第2の制御と、を実行し、前記制御部は、前記第1の制御において、前記励磁区間の中心の位相を、前記電磁コイルに生じる逆起電力の最大値が生じる位相の値よりも早める進角制御を行うとともに、前記第2の制御において、正弦波を模擬するPWM駆動信号を生成する際のゲインを100%としたときに、100%を越えるゲインを実現するように前記デューティ比を増大させる、電機機械装置。
(もっと読む)
電気車制御装置
【課題】インバータ周波数で発生するトルクリップルに起因する騒音を抑制する。
【解決手段】実施形態に係る制御装置は、電気車の主電動機を駆動する可変電圧可変周波数インバータ(VVVFインバータ)を制御する電気車制御装置であって、運転台からのノッチ指令値及び現在の速度に基づいて、前記インバータの第1電流指令値を演算する電流演算部11と、ノッチ指令0が入力された時、前記第1電流指令値を一定の傾きで減少させ、第2電流指令値を提供する電流制御部12と、前記電流制御部12からの前記第2電流指令値に基づいて、インバータゲート指令を生成するベクトル制御部13と、前記ノッチ指令0が入力された時、前記第1電流指令値又は前記インバータの出力電流実際値に基づいて、前記インバータへのゲート指令をオフするまでの時間を演算するオフ時間演算部16と、前記ノッチ指令0が入力された時から、前記オフ時間演算部にて演算された時間経過後、前記インバータへのゲート指令をオフする時間計測部14とを具備する。
(もっと読む)
制御装置
【課題】低速域でd軸電圧指令に電圧補償を行わなくても、速度推定精度が劣化せず、かつ低速域から高速域の全速度域においても高精度な速度推定が可能な、電動機の制御装置を提供することである。
【解決手段】回転座標系のd軸電流検出値が前記回転座標系の第1のd軸電流指令値に近づくように、前記回転座標系の第2のd軸電流指令値を生成するd軸電流指令生成部と、回転座標系のq軸電流検出値が前記回転座標系の第1のq軸電流指令値に近づくように、前記回転座標系の第2のq軸電流指令値を生成するq軸電流指令生成部と、前記第2のd軸電流指令値と、前記第2のq軸電流指令値に基づいて、前記電力変換器の電圧指令を生成する電圧ベクトル演算部と、前記q軸電流検出値と、前記第2のq軸電流指令値に基づいて、電動機の速度推定値を生成する速度推定部と、を備えたことを特徴とする制御装置。
(もっと読む)
波形生成方法及び波形生成装置
【課題】電動機を駆動するインバータの出力電圧波形として、低次高調波を消去しつつ基本波成分の出力電圧の増大を図った電圧波形を生成すること。
【解決手段】電動機をインバータ駆動する際のインバータ電圧波形として、nパルスモードでは、スイッチ角α1〜αnが、正規化した高調波損失を正規化した基本波電力で除した値が最小となる値とする。
(もっと読む)
回転センサレス制御装置
【課題】負荷急変のような過渡変化が生じた場合でも、制御不能に陥ることの無い回転センサレス制御装置を提供する。
【解決手段】実施形態に係る回転センサレス制御装置は、直流電力と交流電力を相互に変換して同期機2を駆動するインバータ1と、前記同期機1に流れる電流を検出する電流検出手段3と、前記電流検出手段3によって得られる電流情報を用いて、前記同期機2の回転位相角の誤差推定値に対応する軸誤差指標を推定する回転位相角誤差推定手段5と、前記回転位相角誤差推定手段5によって得られる軸誤差指標を入力として、センサレス制御ゲインを用いて前記軸誤差指標が零になるように角速度を推定する角速度推定手段7と、前記角速度推定手段7で推定された角速度を用いて回転位相角を推定する回転位相角推定手段8と、前記センサレス制御ゲインを前記軸誤差指標に基づいて変化させるゲイン可変手段6とを備える。
(もっと読む)
電気車制御装置
【課題】 推定回転子位置が真の位置と異なった場合に、インバータの過電流や温度上昇を抑制することが可能な電気車の駆動制御装置を提供する。
【解決手段】 一実施形態に係る電気車制御装置は、直流を任意周波数の交流に変換し、同期電動機4を駆動する電力変換器3と、同期電動機4の回転速度を演算により推定する速度演算部67と、入力されるトルク指令及び速度演算部67により推定された回転速度に基づいて、電力変換器3の出力電圧を制御する制御部61〜64と、速度演算部67により推定された回転速度が異常な値となったことを判別し、制御部61〜64に異常が検出されたことを示す信号を出力する異常判別部73とを具備する。
(もっと読む)
位置・速度センサレス制御装置
【課題】 速度推定部における推定誤差を低減し、推定ゲインを高くすることにより、応答性のよい位置・速度センサレス制御装置を提供する。
【解決手段】 実施形態に係る位置・速度センサレス制御装置は、インバータへの出力電圧指令を演算する出力電圧指令演算手段9と、前記出力電圧指令に基づきゲート信号を生成するゲート生成手段11と、交流電動機7に流れる電流を検出する検出手段6と、第1の周期を有する第1制御割り込みの各区間におけるインバータ出力電圧平均値を区間平均電圧として演算する平均電圧演算手段17と、前記検出手段6にて検出された電流値及び前記平均電圧演算手段17にて演算された区間平均電圧に基づき、前記交流電動機7の回転速度を推定する処理を、前記第1制御割り込みのタイミングで行う速度推定手段13とを具備する。
(もっと読む)
電気車両制御装置
【課題】速度パルスジェネレータが車軸に取り付けられた電気車両制御装置において、センサレスベクトル制御の速度推定検出部を共に用いることで、精度の良い速度検出制御ならびに電気車制御を提供する。
【解決手段】実施形態の電気車制御装置は、速度パルスジェネレータ9からのパルス信号を角速度に変換し、検出角速度として提供するパルス速度変換部10と、主電動機6をベクトル制御するベクトル制御部3と、インバータ5の電圧指令と電流検出値から前記主電動機6の角速度を推定し、該推定角速度を前記パルス速度変換部から得られる検出角速度を用いて補正し、速度情報として前記ベクトル制御部3に提供する速度補正部11aとを具備する。前記速度補正部11aは、前記パルス速度変換部10からの前記検出角速度と前記推定角速度との差が所定値以上の場合、前記検出角速度を前記速度情報として前記ベクトル制御部3に提供し、それ以外の場合、前記推定角速度を提供する。
(もっと読む)
回転角度検出装置
【課題】回転数が低い場合でも回転数の変動を抑制できるようにする。
【解決手段】制御装置60(回転角度検出装置)は、回転電機40(回転部材)の回転に伴って信号を出力するレゾルバ41と、レゾルバ41から出力される信号に基づいて検出される回転角度を示す検出角度θdの誤差を誤差補正手段65aによって補正する補正実行手段64と、補正された検出角度θdに基づいて検出回転数Nsを算出する回転数算出手段63と、検出回転数Nsが指令された指令回転数N*となるようにフィードバック制御を行う回転数フィードバック制御手段61と、検出回転数Nsおよび指令回転数N*のうちで一方または双方の回転数に基づいて補正実行手段64による補正を行うか否かを判断する補正実行判断手段62とを備える。補正実行手段64は、補正実行手段64による補正を行うと判断された場合にのみ検出角度θdの誤差を補正する。
(もっと読む)
可変磁束ドライブシステム
【課題】可変磁石であることによるトルク精度の劣化の抑制や磁化処理に伴う過渡トルクの抑制を図り、システム全体の効率を向上し広い速度範囲に対応できる可変磁束ドライブシステムを提供することである。
【解決手段】磁化要求生成部29は、インバータの変調率に応じて可変磁石を磁化させる要求を可変磁束制御部13に対して発生し、可変磁束制御部13は、その磁化要求を入力すると、インバータ1からの磁化電流によって磁束を可変させて可変磁石を磁化させる。切替器37は、トルク指令生成部38からのトルク指令に基づくDQ軸電流基準と可変磁束制御部13からのDQ軸磁化電流指令とを切り替え、ゲート指令生成部15は、切替器37からのトルク指令に基づくDQ軸電流基準またはDQ軸磁化電流指令に基づいてインバータ1を制御するためのゲート指令を生成する。
(もっと読む)
回転機の制御装置および回転機の制御システム
【課題】回転数および電圧値が変化しても、従来よりもトルク応答性を向上させる。
【解決手段】回転機(電動機50等)の制御装置20において、電動機50の回転数Nおよび電力変換回路40に入力する電圧値Vdcに基づいて制御ゲインを設定するゲイン設定器23と、少なくとも積分要素を含み、トルク指令T*とトルクとの偏差とゲイン設定器23で設定される制御ゲインとに基づいてフィードバック制御を行い電力変換回路40が出力する電圧の位相を示す電圧位相指令θ*を出力するフィードバック制御器24と、フィードバック制御器24から出力される電圧位相指令θ*に基づいてスイッチング素子の制御を行う制御信号Scを生成して電力変換回路40に出力するスイッチング信号生成器25とを有する構成とした。回転数Nや電圧値Vdcが変化しても適切な制御ゲインが設定され、トルク応答性が向上する。
(もっと読む)
PWMインバータの制御装置およびPWMインバータの制御装置を備えた鉄道車両
【課題】鉄道車両において、非同期PWMから同期PWMにかけてPWMパルスの出力を変調でき、電動機から発生する電磁騒音を抑制する高調波抑制手段を提供する。
【解決手段】速度検出部101、ベクトル制御演算部102、PWM制御演算部103、キャリア周波数104、変調率制御量生成部105より構成されるPWMインバータ制御装置9において、不連続かつ不規則に平均値≒0となるテーブルにより値を変化させ、キャリアの半周期ごとに符号を反転させることを特徴とする変調率制御量ΔVcを、変調率基準値Vc0に加算し、PWM制御演算部に入力することを特徴とするPWMインバータ制御装置。
(もっと読む)
1 - 20 / 228
[ Back to top ]