
Fターム[5H505AA20]の内容
交流電動機の制御一般 (51,584) | 用途 (3,022) | 巻取 (15)
Fターム[5H505AA20]に分類される特許
1 - 15 / 15
誘導電動機の速度制御装置
【課題】本発明は、連続工程ラインにおいて張力及び位置センサーを用いないオープン−ループ速度制御を行って、ベクトルインバータの機能を向上するための誘導電動機の速度制御装置を提供する。
【解決手段】本発明の装置は、張力指令、摩擦損補償を利用して、速度制御部の出力に対するトルク制限を計算し、これを利用して誘導電動機の速度を制限して、連続工程ラインで張力センサー及び位置センサーを用いることなく、ベクトル制御方式のインバータの性能を向上することができる。
(もっと読む)
誘導電動機の制御装置及び制御方法

【課題】誘導電動機の回転速度を把握し、その回転速度よりトルク指令値を演算した後、そのトルク指令値で誘導電動機を制御することでトルクモータと同等の回転速度−トルク特性が得られるようにすることができる誘導電動機の制御装置又は制御方法を提供する
【解決手段】誘導電動機の制御装置10は、基本トルク指令値と誘導電動機106の検出速度又は速度推定部112からの推定速度とからトルク指令値を演算するトルク指令値演算部18と、トルク指令値に基づいて、トルク電流指令値を演算するトルク電流指令値演算部19とを備える。
(もっと読む)
抄紙機のロール速度制御方法および装置
【課題】抄紙機システムにおいて、ロール間の断紙発生時の、外乱による上流側への影響を抑制することで、断紙による抄紙機システム全体に与える影響を最小限に抑止する。
【解決手段】実張力変動想定箇所が搬送ロール4Rと搬送ロールSR間で張力変動が発生すると、前段の搬送ロール4Rは後段ロールSRから受けるシート張力相当のトルク基準追加出力が必要となる。実張力変動想定箇所で実張力変動が発生していない時に張力検出器TDで検出したシート張力を速度制御器13の出力から差し引いておくことにより、実張力変動想定箇所で張力変動が発生した場合、トルク制御器17に対する補正を瞬時に応答することで、搬送ロール4Rが必要とするシート張力に相当するトルク基準をトルク制御器17に与えることができる。これにより実張力変動発生箇所の上流部分に対する速度変動の抑制を行うことができる。
(もっと読む)
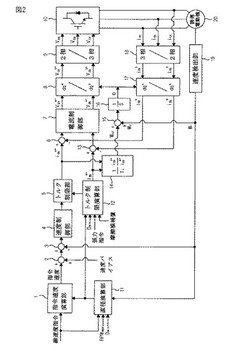
トルク制御装置
【課題】 ウェブ巻取機に用いる三相交流誘導電動機のトルクを簡単な回路で制御する。
【解決手段】 直流電源6からインバータ3で三相交流電流を生成して、三相交流誘導電動機1を駆動する。三相交流誘導電動機1の回転数を、速度検出器4で計測して回転子角速度ωmを得る。最適値に設定されたすべり周波数に対応するすべり角速度に、速度検出器4で計測した回転子角速度を加算して、駆動角速度を求める。トルク指令値に対応するトルク成分電流の二乗から固定子電流の二乗の9/8倍を引いた値を0にするような固定子電圧指令値を、PID制御手段で発生する。固定子電圧指令値と界磁角速度指令値に従って三相正弦波を発生する。PWM回路で、三相正弦波をPWM変調した信号でインバータ3を制御する。すべり周波数を一定に保ちながら、電流検出器5と速度検出器4のみで目的のトルクに維持できる。
(もっと読む)
ダイクッション駆動装置
【課題】プレス機のダイクッション駆動装置をサーボモータにより電動化し、そのサーボモータの回生エネルギーを電源に戻すことによりエネルギーの節約を実現する。
【解決手段】プレス機のダイクッション(52)を駆動する駆動源としてのサーボモータ(11)と、そのサーボモータからの回生エネルギーを交流電源(13)へ回生する回生機能付き電源回路(12)とを備える。
(もっと読む)
電力変換装置
【課題】
ACサーボモートルなどの電流制御系を内蔵した制御装置において、使用環境が粉塵、綿ボコリが多く、湿度の高くても、プリント基板の導体パターンやICのリード端子間のショートで制御装置が破損する等の復帰できない故障をなくし、高信頼性製品を作り上げる事にある。
【解決手段】
本発明では、電流検出器から加算点までのフィードバックの後向きのループ、および電流制御の加算点から、スイッチング素子のゲート端子まで、前向きのループの導電部分を、外部の雰囲気に触れることなくパワーモジールの中に実装して密封する。電流ループと、それ以外の位置制御、速度制御、インターフェイス処理を2個所に分けて分散処理を行う。このため電流フィードバックを含む電流制御ループを、別の副マイクロプロセッサで構成して、共にエポキシ樹脂などの樹脂でモールドして作られるパワーモジールの中に実装する。
(もっと読む)
3相交流モータの巻線切換装置および巻線切換方法
【課題】 モータの加減速中であっても、モータの電流指令を小さくすることなく巻線切換ができ、巻線切換時のショックが少なく、滑らかな速度が得られる3相交流モータの巻線切換装置を提供する。
【解決手段】 3相交流モータの巻線切換装置において、巻線選択信号を同期信号に同期化させて、同期化された巻線選択信号を出力する巻線選択同期器と34、同期信号、速度モード、および演算完了信号に基づいて巻線切換シーケンス制御演算を行い、演算開始信号、定数切換信号、および巻線選択信号を出力する巻線切換シーケンス制御部30と、相電圧指令を同期信号に同期化させて、同期化された相電圧指令を出力する電圧指令同期器33と、を備える。
(もっと読む)
リール装置の駆動制御装置および駆動制御方法
【課題】可撓性長尺材の巻取・引出しをするリールの駆動電動機は、その駆動制御に複数の制御要素を必要としているために、制御要素の検出に伴う誤動作防止の対策や管理が煩雑であり、また、電動機の制御は、過度な巻取・引出しトルクの生成を伴いやすく、これが無駄なエネルギ消費やケーブルやホース等に対する過剰な張力になっていた。
【解決手段】リールを駆動する電動機の制御の演算要素に電動機(又はリール)の回転速度を用い、回転速度が高くなるに従ってリールの巻取り負荷が減少する場合は、駆動制御装置による電動機のトルク制限値が電動機の回転速度の増大に従って低くなるように演算させ、電動機の回転速度が高くなるに従って巻取り負荷が増大する場合は、駆動制御装置による電動機のトルク制限値を電動機の回転速度の増大に従って高くするように演算させ、この演算出力により電動機の制御をする。
(もっと読む)
テンショニングメカニズムのための制御式電動モータ装置
【課題】 テンショニングメカニズム、特にストランド手段及び/又は歯車機構手段のためのテンショニングメカニズムを実現させることを目的とする、複数の電動モータを付けた電気駆動装置のための界磁指向制御方法と、この制御方法の実行に適した電動モータ装置を提供する。更に、この電動モータ装置の運転方法を提供する。
【解決手段】 2つの同期モータをその相巻線でもって直列接続し、そこで、その両方の磁極ホイールと回転子磁束を互いに位相差又は角度差を付けて回転させる。両同期モータに、位置制御器及び/又は速度制御器を包含する共通の制御装置を割り当て、その起動制御のために電流変換器と結合させる。こうして、両同期モータに共通の電流変換器からそれぞれ同一の相電流を供給する。
(もっと読む)
ACモータのためのトルク制御
多相交流(AC)誘導モータのトルクを制御するシステムは、引き金が引かれた際に前記AC誘導モータ(28)にAC電流を導くためのトリガー式双方向電子スイッチ(50)、PWM信号を発生させるためのパルス幅変調(PWM)信号ジェネレータ(46)、及び前記PWM信号のパルスの間に発生するAC電源装置(44)の零交差ポイントを検出するための零交差回路(58,60,62)であって、検出された各零交差ポイントにおいて前記双方向電子スイッチの引き金を引く出力パルスを発生する零交差回路、を有し、前記PWM信号のデューティサイクルは、AC誘導モータの平均トルクを制御するようにセットされる。  (もっと読む)
(もっと読む)
交流電動機の駆動制御装置
【課題】交流電動機の運転状態や要求されるトルクに応じて磁束基準のパターンを変化させ、交流電動機の1次電流が交流電動機駆動用インバータの定格電流値の一定程度以上となるようにし、定常運転時における1次電流の検出精度を向上させ、トルク制御精度を上げる。
【解決手段】交流電動機に対する速度指令を元に運転状態を検出する運転状態判定手段19と、加減速中および定速運転中のそれぞれにおける磁束基準パターンを有し、交流電動機に対する速度指令から加減速中又は定速運転中を判定し、判定結果に基づいて磁束基準パターンを切換える磁束基準パターン選択回路20とを備え、加減速中および定速運転中にかかわらず交流電動機の1次電流を交流電動機駆動用インバータ制御装置の定格に対して一定以上の割合となるように制御する。
(もっと読む)
電動機駆動装置の制御方法
【課題】潮の干満や風などの天候条件により船体と陸の相対位置が変化した場合、長期間に亘って係船していた場合にも係船位置が変化しない制御方法を提供する。
【解決手段】係船機の回転軸に連結される誘導電動機を駆動する電動機駆動装置の制御方法において、通常は、指令される前記回転軸の速度指令値に対応するように低速度制御に基づき前記電動機に所望の交流電力を前記電動機駆動装置から供給することで前記電動機を駆動し、張力制御指令が発せられたときには、定トルク制御に基づき、潮の干満や天候などの外的な条件に左右されず係船索の張力が一定となるように電動機を制御することができる。
(もっと読む)
コードホイール、エンコーダ、及びモータ
【課題】 被検出部材の変形を防止又は抑制できるコードホイール、エンコーダ、及びモータを得る。
【解決手段】 本アウタロータ型モータでは、出力軸にはエンコーダを構成するコードホイール34が取り付けられている。このコードホイール34は、出力軸に固定されるホルダ38と、PETの薄板から成りホルダ38を介して出力軸に同軸的に取り付けられる円板状のセンサプレート36とを備えている。ホルダ38は、出力軸が圧入される本体部50に対して径方向外側に離間しかつ出力軸に対して同軸的な円筒状の支持部54と、支持部54の径方向内側に離間しかつ出力軸に対して同軸的な内側リブ62とを備えており、センサプレート36は、支持部54のリング状の端面54Aと、内側リブ62のリング状の端面62Aとに共に固着されている。このようにホルダ38とセンサプレート36との接触部分がリング状で面積が狭いため、両者の熱変形量の差による影響を少なくできる。
(もっと読む)
誘導電動機の制御方法、制御装置、製鉄・非鉄設備、鉄道車両、巻取機、船舶、工作機械、抄紙機設備および搬送設備
【課題】 誘導電動機の定格出力以上の高出力を得ることを目的とする。
【解決手段】 界磁磁束が強め界磁磁束状態にあるときに界磁弱め制御によるベクトル制御を行う誘導電動機1の制御方法において、強め界磁磁束状態時には、誘導電動機1の回転速度Nの上昇に比例して内部誘導起電力を大きくしていき、内部誘導起電力が定格回転速度時よりも大きくなったときに界磁弱め制御によるベクトル制御に切替える。そして、界磁弱め制御時には、切替時の内部誘導起電力を一定に保ちながらベクトル制御を行う。
(もっと読む)
誘導電動機の制御方法、制御装置、製鉄・非鉄設備、鉄道車両、巻取機、船舶、工作機械、抄紙機設備および搬送設備
【課題】 誘導電動機の定格出力以上の高出力を得ることを目的とする。
【課題手段】 誘導電動機1の界磁磁束が強め界磁磁束状態にあるときに界磁弱め制御によるベクトル制御を行う誘導電動機の制御方法において、誘導電動機1の回転速度Nが定格回転速度よりも大きくなったときに、界磁弱め制御を行う。そして、界磁弱め制御時には、誘導電動機1の内部誘導起電力が定格回転速度時よりも大きくなるように界磁磁束を変化させる。また、界磁弱め制御の開始後は、回転速度Nの上昇に応じて、誘導電動機1の端子電圧が最大過負荷時の最大電圧を超えないように界磁磁束を弱める。
(もっと読む)
1 - 15 / 15
[ Back to top ]