
Fターム[5H505EE41]の内容
交流電動機の制御一般 (51,584) | 電動機の制御方法 (6,264) | ベクトル制御を行うもの (1,991)
Fターム[5H505EE41]に分類される特許
201 - 220 / 1,991
回転電機制御装置
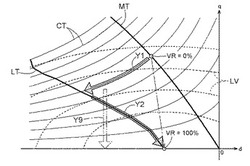
【課題】弱め界磁制御の限界点を超えた後も含め、幅広い駆動条件に対して、高い運転効率で回転電機を駆動制御する。
【解決手段】ロータと同速で回転する回転座標系に対応した電流指令を電流指令マップに基づいて決定する電流指令決定部は、電圧不足割合VRがゼロ以下の場合には、目標トルクに応じた等トルク線CTと基本制御線MTとの交点に電流指令を決定し、電圧不足割合VRがゼロ以上の場合には、目標トルクに応じた等トルク線CTに沿って電圧不足割合VRの増加に伴い限界トルク線LTへ向かう点に電流指令を決定し、電圧不足割合VRの増加により目標トルクに応じた等トルク線CTに沿った電流指令が限界トルク線LTに達した場合には、限界トルク線LTに沿って電圧不足割合VRの増加に伴い電圧制限楕円LVの中心へ向かう点に電流指令を決定する。
(もっと読む)
モータインバータの制御方法、及び制御装置

【課題】モータインバータの電圧飽和を抑えつつ、d軸電流指令値、q軸電流指令値を用いてそのモータインバータを制御するための技術を提供する。
【解決手段】飽和率判定部210は、取得した電圧飽和率が所定値を越えているか否か判定する。電力誤差PI制御部220は、d軸電流指令値、q軸電流指令値を用いて指令電力値を、実際のd軸電流値、q軸電流値を用いて実電力値をそれぞれ計算し、計算した指令電力値及び実電力値を用いて、d軸電流指令値の補正に用いる補正量を計算する。Id補正部230は、計算された補正量を用いて補正d軸電流指令値を計算する。Iq補正部240は、補正d軸電流指令値を用いることにより電流許容量以上の電流が供給される場合に、q軸電流指令値を補正する。そのようにして、モータインバータにおける電圧飽和を抑える。
(もっと読む)
モータ制御装置
【課題】非干渉化制御を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI制御量を演算するためのPI制御手段50,51と、モータの非干渉化制御のための非干渉化制御量を所定のタイミングで演算するための非干渉化制御量演算手段52と、PI制御手段50,51により演算されたPI制御量と非干渉化制御量演算手段52により演算された非干渉化制御量とから補正後の非干渉化制御量を決定する補正演算手段53,54と、PI制御手段50,51によって演算されたPI制御量と補正演算手段53,54によって補正された補正後の非干渉化制御量とを加算する加算手段55,56と、を備え、加算手段55,56は、所定の条件をみたす場合は、非干渉化制御量演算手段52によって演算された前回値の非干渉化制御量を補正後の非干渉化制御量として加算する。
(もっと読む)
モータの診断方法
【課題】 車両の走行時と、車両の非走行時のいずれの場合でも、モータコイルの異常を検出することができ、モータ異常への対処を早期に図ることができるモータの診断装置および診断方法を提供する。
【解決手段】 車両の電源が投入されている非走行時に、モータコイルのコイル温度とモータコイルのコイル抵抗または絶縁抵抗とを検出し、コイル温度が閾値を超えるか、または、コイル抵抗もしくは絶縁抵抗が閾値を超えたときモータコイルの異常と検出する始動時異常検出手段98を設けた。さらに車両の走行時に、コイル温度とモータ回転数とモータ印加電圧とモータ電流とを検出し、コイル温度が閾値を超えるか、または、モータ回転数に対応する、モータ印加電圧とモータ電流との関係が設定範囲から外れるときモータコイルの異常と検出する走行時異常検出手段99を設けた。
(もっと読む)
モータ制御装置
【課題】簡単な構成および制御によって効率の良い運転を可能にする。
【解決手段】モータ制御装置は、回転数の設定のための指令が与えられたことに応じて、同期モータを駆動するための駆動波データに基づく駆動電圧信号を複数相の各相ごとに生成する電圧信号生成部と、特定相のモータ電流を検出するモータ電流検出部21と、生成された特定相の駆動電圧信号と、モータ電流検出部21から出力されたモータ電流信号との位相差を検出して位相差情報を出力する位相差検出部と、特定相の駆動電圧信号の電圧振幅値、同期モータの誘起電圧振幅値、および検出された位相差情報から電圧位相を推定する部分と、推定された電圧位相から、位相差情報が示す位相差を減算した値を0とするための調整用電圧信号を生成する部分とを備えて、生成された調整用電圧信号を駆動電圧信号に帰還させる。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】固定子コイルに相電流を流してモータを温める際に、同期モータにトルクを発生させず、回転子に加わる逆磁界を低減する。
【解決手段】モータ制御部40は、モータの回転子磁束と平行なd軸磁界成分を発生させるd軸電流目標値の瞬時値に所定しきい値よりも正側の値で、かつ、所定期間におけるd軸電流目標値の平均値がゼロより正側となる値を設定し、回転子磁束と直交するq軸磁界成分を発生させるq軸電流目標値に回転子が回転しない値を設定する目標電流設定部45と、d軸電流目標値とq軸電流目標値に基づいて、モータの固定子のコイルに駆動電流を流す制御を行う駆動制御部と、を備える。
(もっと読む)
モータ制御装置、モータ制御装置製造用プログラム、及びモータ制御装置の製造方法
【課題】モータの回転角度の補正を行っても、制御処理のスループット低下を防止する。
【解決手段】モータ制御装置は、モータの回転角度と角速度とを求め、前記角速度をビットシフトにより2のべき乗で除算するN(Nは2以上の正の整数)個のビットシフト回路と、1番目の前記ビットシフト回路の出力値から2〜N番目の前記ビットシフト回路の出力値を減算して前記回転角度の補正量を求め、当該補正量により前記回転角度を補正する演算回路とを備える補正部とを有し、モータを流れる三相交流電流から目標のトルクを得るための二相直流電圧を前記角速度に基づいて求めて、前記二相直流電圧を前記補正回転角度の正弦、余弦に基づいて三相交流電圧に変換することで、制御処理のスループット低下を防止する。
(もっと読む)
回転機の制御装置
【課題】d軸方向に高周波電圧信号を重畳し、これに伴ってモータジェネレータ10を流れる高周波電流に基づき回転角度θを推定する方式の場合、回転角度θの推定に際してノイズが生じること。
【解決手段】角度推定部40では、拡張誘起電圧に基づき回転角度を推定する。ここで、モータジェネレータ10に印加される電圧の高周波成分は、インバータIVの現在の操作状態を表現する電圧ベクトルViから指令電圧vdr,vqrを減算したものとなる。これに伴ってモータジェネレータ10を流れる電流に生じるリプルに基づき、拡張誘起電圧におけるq軸電流の微分値に比例する量を算出することで、回転角度θを推定する。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、騒音を増大させること無く検出する。
【解決手段】本実施形態のモータ制御装置は、インバータ回路の直流側に接続され電流値に対応する信号を発生する電流検出素子と、キャリア信号とデューティに基づきPWM信号パターンを生成するPWM信号生成手段と、3相の各相が所定の制御期間であるかを判定し、制御期間に該当する相についてキャリア信号の位相またはデューティの値を制御する制御手段と、電流検出素子に発生した信号と前記PWM信号パターンとに基づいて、モータの相電流を検出する電流検出手段とを備え、3相のうち少なくとも1つの前記スイッチング素子のオン、オフ状態が変化した時刻から抵抗素子に発生した信号を読み込むまでの最小待機時間をτとしたとき、制御手段は、2つの相電流がτ時間以上同時に流れる区間と、前記2つの相電流の少なくとも一方がτ時間以上単独に流れる区間との組み合わせとなるように、キャリア信号の位相またはデューティの値のいずれかを制御する。
(もっと読む)
回転機の制御装置
【課題】d軸方向に高周波電圧信号を重畳する方式の場合、回転角度の推定に際して重畳される電圧の制約が大きいこと。
【解決手段】高周波電圧信号設定部50では、高周波電圧信号を設定する。操作信号生成部42では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ52は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。角度推定部54では、図示される式によって回転角度θを推定する。ただし、高周波電圧信号vαh,vβhは、「Σvαh・vβh=0を満たすものとする。
(もっと読む)
インバータ制御装置
【課題】モータの高速化および多極化に対する厳しい要求に対してもインバータ制御を追従させることのできるインバータ制御装置を提供することを目的とする。
【解決手段】基準キャリア周波数の1周期間隔で第1処理を実行するとともに、基準キャリア周波数をm(mは2以上の整数)倍した高周波キャリア信号の1周期間隔で第2処理を実行することにより、高周波キャリア信号の1周期間隔でPWMデューティを更新する。第1処理においては、モータ電流の計測値に基づいて2相電圧指令値および電気角を算出する。第2処理は、第1処理で算出された電気角に、第1処理からの時間に基づいて求められる角度シフト量を加算することで本処理の電気角を算出し、算出した該電気角を用いて第1処理で求められた2相電圧指令値を2相/3相変換して3相電圧指令値を算出し、PWMパルス信号のデューティを算出する。
(もっと読む)
インバータ制御装置
【課題】電圧指令ベクトルの補正による相電流の歪みを軽減できるインバータ制御装置を提供する。
【解決手段】インバータの三相電圧が追従すべき電圧のベクトルであって、三相の各相電圧の合成電圧のベクトルからなる電圧指令ベクトルを作成する電圧指令ベクトル作成手段と、作成された前記電圧指令ベクトルを補正する電圧指令ベクトル補正手段とを備え、補正後の前記電圧指令ベクトルに従って前記インバータを制御すると共に、前記電圧指令ベクトル補正手段は、当該電圧指令ベクトル補正手段によって補正された後の前記電圧指令ベクトルが、前記電流検出区間において前記三相電流が検出不可能な領域外のベクトルとなるように補正し、キャリア周期内の電流非検出区間においては、前記電流検出区間における補正を打ち消す逆補正を行う。
(もっと読む)
インバータ制御装置およびインバータ制御方法
【課題】電流検出または電流推定を行わずにデッドタイムによる電圧誤差を無視できるレベルまで低減し、電流センサレスかつデッドタイム補正レスで、高精度の電圧制御が可能なインバータ制御装置およびインバータ制御方法を得る。
【解決手段】3相モータ電気角を検出する角度検出手段(20)と、角度検出手段により検出された電気角に基づいてゲート信号を生成して複数のスイッチング素子をスイッチング動作させる制御部(30、40)とを備え、制御部は、指令電圧の位相に基づいて生成した180度通電制御の矩形波信号を基本波形として、矩形波信号におけるオン状態の期間を3等分した内の中央の期間にPWMパルスを挿入することで前記ゲート信号を生成する。
(もっと読む)
モータ制御装置
【課題】DCモータ制御及びACモータ制御の両機能を兼用する際に、DCモータとACモータとの切り替えを、小規模及び低コストにて実現する。
【解決手段】制御部10の磁束電流指令AC/DC切替部11は、磁束指令部121から磁束電流指令を入力し、切替信号を入力し、切替信号がACを示す場合、入力した磁束電流指令を出力し、切替信号がDCを示す場合、予め設定されたデータ0の磁束電流指令を出力する。電気角AC/DC切替部12は、電気角計算部130により計算された電気角を入力し、切替信号を入力し、切替信号がACを示す場合、入力した電気角を出力し、切替信号がDCを示す場合、予め設定された固定の電気角330°を出力する。電圧指令2相−3相変換部131は、DCモータ105を駆動する場合、絶対値が等しく逆相となるU相電圧指令及びV相電圧指令、並びにデータ0のW相電圧指令を生成する。
(もっと読む)
インバータ制御装置
【課題】インバータの制御がPWM領域においてはスイッチング周波数に悪影響を及ぼさず、1パルス領域においては運転周波数に関らず電流偏差量の少ない電流応答が得られる制御装置を提供する。
【解決手段】実施形態は、PWM用補正電流基準と電動機電流との比較に基づいて、電動機を駆動するインバータのスイッチング制御信号を直接発生し、制御モードが電動機の中低速域ではPWM制御、高速域では1パルス制御と自動移行する電流追従型PWM制御回路を用いたインバータ制御装置において、電動機の磁束及びトルクを制御すべくベクトル演算して得られた電流基準と、電動機電流との偏差を増幅する定常偏差補正回路と、前記定常偏差補正回路出力信号を前記電流基準に加算してPWM用補正電流基準を演算する加算回路と、電流追従制御型PWM制御回路がPWM制御モードで動作しているとき、前記定常偏差補正回路での制御を積分制御に設定し、1パルスモードで動作しているとき比例積分制御に切換える切換え回路とを具備する。
(もっと読む)
回転電機制御装置
【課題】非対称な突極性を有する永久磁石型の回転電機を制御対象とし、界磁磁束の調整制御を含めて、マグネットトルク及びリラクタンストルクを充分活用できるように最適化されたベクトル制御を実現する。
【解決手段】第1ベクトル空間において電流指令id_M*,iq_M*を演算する電流指令演算部1と、第2ベクトル空間において電圧指令vd_L*,vq_L*を演算する電圧指令演算部3とを備える。第1ベクトル空間は電機子磁束によって永久磁石からの界磁磁束を調整する界磁調整制御のための電流指令の調整方向に沿った方向を一方の軸とする直交ベクトル空間であり、第2ベクトル空間は、ロータ40の回転軸心からロータ40の表面における電機子磁束の磁束密度最大位置に向かう方向に沿った方向を一方の軸とする直交ベクトル空間である。
(もっと読む)
回転電機駆動システム
【課題】回転電機駆動システムにおいて、ステータ巻線に過大な電流が流れることを防止しつつ、低い回転領域でもトルクの増大を図れる回転電機を実現することである。
【解決手段】ステータ12は、ステータコア26に集中巻きで巻装された複数相のステータ巻線28u,28v,28wを有する。ロータ14は、ロータコア16の周方向複数個所に巻装されたロータ巻線42n、42sと、各ロータ巻線42n、42sに接続され、各ロータ巻線42n、42sの磁気特性を周方向に交互に異ならせる整流部としてのダイオード21n、21sとを有する。回転電機駆動システムは、ステータ巻線28u,28v,28wに電流を流すためのq軸電流指令にパルス状に減少させる減少パルス電流を重畳させる減少パルス重畳手段を含む。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】モータの回転数を回転数検出手段によらないで変化させる所定の監視対象の変化量を検出し、コントローラで認識される回転数を補正するフィードフォワード制御手段を備える。
(もっと読む)
回転機の制御装置
【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部22では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ58は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部60は、高周波電圧指令信号と高周波電流信号との外積値を算出する。これがゼロとなるように回転角度θが操作される。高周波電圧指令信号と指令電流とが直交する設定を採用する。
(もっと読む)
回転電機駆動システム
【課題】回転電機駆動システムにおいて、ステータ巻線に過大な電流が流れることを防止しつつ、低い回転領域でもトルクの増大を図れる回転電機を実現することである。
【解決手段】ステータ12は、ステータコア26に集中巻きで巻装された複数相のステータ巻線28u,28v,28wを有する。ロータ14は、ロータコア16の周方向複数個所に巻装されたロータ巻線42n、42sと、各ロータ巻線42n、42sに接続され、各ロータ巻線42n、42sの磁気特性を周方向に交互に異ならせる整流部としてのダイオード21n、21sとを有する。回転電機駆動システムは、ステータ巻線28u,28v,28wに電流を流すためのq軸電流指令にパルス状に減少させる減少パルス電流を重畳させるとともに、d軸電流指令にパルス状に増加させる増加パルス電流を重畳させる減少増加パルス重畳手段を含む。
(もっと読む)
201 - 220 / 1,991
[ Back to top ]