
Fターム[5H505HB02]の内容
交流電動機の制御一般 (51,584) | 電力変換回路の構成 (3,942) | インバータ (3,649) | 電圧形インバータ (1,210)
Fターム[5H505HB02]に分類される特許
161 - 180 / 1,210
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】電圧利用率を改善しつつ、デューティ制約を満たすことができるモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】直流電源41に接続された3相モータ12を駆動するモータ駆動回路40と、3相モータのモータ電流を検出する単一のモータ電流検出部42と、モータ電流検出値に基づいて3相モータの各相電流値を求める各相電流演算部35と、電流指令値を演算するモータ電流指令部34と、演算した電流指令値と前記各相電流値との電流偏差に応じて3相駆動電圧値を演算する3相駆動電圧演算部37と、電圧利用率改善及び3相駆動電圧波形補正を行う補正演算式に従って前記3相駆動電圧値を補正して3相駆動電圧補正値を演算する3相駆動電圧補正部38と、演算した3相駆動電圧補正値に基づいて前記モータ駆動回路を制御するパルス幅変調信号を生成するパルス幅変調信号生成部39とを備えている。
(もっと読む)
電力変換回路の駆動装置

【課題】インバータを構成するパワースイッチング素子を構成する半導体基板上に形成される微小電極の出力電流に基づき、フリーホイールダイオードに電流が流れる還流モードを判断し、還流モードと判断される場合にパワースイッチング素子をオフとする場合、還流モードと判断できる領域が狭くなること。
【解決手段】U相を流れる電流iuを検出する電流センサとV相を流れる電流ivを検出する電流センサとに基づき、U,V、W相について、還流モードであるか否かを判断する。ここで、W相については、電流iuと、「−iv」との大小比較に基づき、還流モードであるか否かを判断する。
(もっと読む)
電動機の制御装置および制御方法
【課題】1台の電圧形インバータで誘導電動機と同期電動機の双方を所望の速度に制御する。
【解決手段】誘導電動機速度制御器12は、誘導電動機1の回転速度指令値ωIM*と、誘導電動機1の回転速度ωIMとの偏差から比例積分制御等により磁極方向電流指令値Id*を演算する。同期電動機速度制御器13は、同期電動機2の回転速度指令値ωSM*と、同期電動機2の回転速度ωSMとの偏差から比例積分制御等により磁極直交方向電流指令値Iq*を演算する。dq軸電流制御器14は、磁極方向電流指令値Id*と磁極方向電流値Idとの偏差、および、磁極直交方向電流指令値Iq*と磁極直交方向電流値Iqとの偏差から、比例積分制御等により磁極方向電圧指令値Vd*および磁極直交方向電圧指令値Vq*を演算する。
(もっと読む)
インバータ駆動装置
【課題】シャント抵抗には温度特性があるため、高温時などには実際の電流値と検出電流値にずれがでるという課題があった。本発明は、インバータ回路において、シャント抵抗の温度特性を考慮して検出電流値の精度を向上させるものである。
【解決手段】シャント抵抗の温度特性値を含めて検出電流値の補正を行うことでシャント抵抗が高温になっても電流検出を精度良く行うことを実現できようにし、より精度の高い制御を行うことが可能なインバータ駆動装置を提供することができる。
(もっと読む)
回転電機の減磁判定システム
【課題】回転電機の運転状態に拘わらず精度良く、永久磁石の減磁を判定する技術を提供する。
【解決手段】減磁判定システム10は、永久磁石型の回転電機の多相コイルに流れる電流を永久磁石が発生する磁界の方向であるd軸と当該d軸に直交するq軸とのベクトル成分に座標変換してフィードバック制御する際のq軸目標電圧を実q軸電圧vqとして取得する実q軸電圧取得部1と、永久磁石に減磁が生じていない状態でのq軸目標電圧を基準q軸電圧vqrとして取得する基準q軸電圧取得部2と、少なくとも力行運転状態か回生運転状態かの区分を表す運転状態区分と実q軸電圧vqと基準q軸電圧vqrとに基づいて永久磁石の減磁の状態を判定する減磁判定部7とを備える。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】簡易な構成でありながら位置決め精度を高められる駆動装置、駆動方法、及び装置を提供する。
【解決手段】駆動装置(1a)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(31)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(32)と、第1の位置情報と前記第2の位置情報とを選択的に用いて駆動部(10)を制御する制御部(100a)と、を備える。
(もっと読む)
洗濯乾燥機
【課題】誘導電動機の駆動条件をより的確に規定し、特に乾燥時の必要トルクを確保し、誘導電動機への電流を抑えること。
【解決手段】洗濯および乾燥される衣類30を収納するドラム31と、ドラム31を回転させる誘導電動機33と、誘導電動機33に電力を供給するインバータ回路34と、ドラム31内に乾燥用の空気を加熱する加熱手段35を有し、洗濯時にはインバータ回路34は誘導電動機33を駆動し、乾燥時にはインバータ回路34が誘導電動機33を駆動するとともに加熱手段35が動作し、インバータ回路34は、洗濯時と乾燥時に同等のスベリ周波数の電力を誘導電動機33に供給することにより、誘導電動機33への電流を抑え、効率も高めつつ駆動できる。
(もっと読む)
モータ制御装置
【課題】モータの実トルクと演算トルクとが相違するような異常が発生した場合に、その異常を検出して異常処理を実現することができるモータ制御装置を提供する。
【解決手段】モータ制御装置1は、モータ20に発生させるべきトルクを指定するトルク指令値C1を出力する上位制御部11と、モータ20で発生するトルクに対する反作用によってモータ20の支持部21に生ずる応力に基づいてモータ20で発生するトルクを検出するトルク検出部TDと、上位制御部11から出力されるトルク指令値C1とトルク検出部TDで検出される検出値とを比較する比較器16と、上位制御部11からのトルク指令値C1と比較器16の比較結果とに応じてモータ20を駆動するモータ駆動装置12とを備える。
(もっと読む)
電源システムの制御装置およびそれを搭載する車両
【課題】電源システムの制御装置において、部品追加を行なうことなく、コンバータのリアクトルを流れる電流を検出するための電流センサの異常を検出することによって、コンバータの信頼性を向上する。
【解決手段】電源システム20は、蓄電装置28と、リアクトルL1を有するコンバータ12と、リアクトルL1を流れる電流を検出するための電流センサ18とを含み、モータジェネレータMG1,MG2を含む負荷装置45に電源を供給する。そして、電源システム20の制御装置30は、電流センサ18の検出値に基づきコンバータ12の駆動指令を生成することによってコンバータ12をフィードバック制御するとともに、所定期間の電流センサ18の検出値に基づいた電流の変化と、所定期間のコンバータ12の状態に基づいて演算により求められる基準となる電流の変化とを比較することによって、電流センサ18の異常を検出する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】効率よくモータを動作させることができるモータ制御装置及びモータ制御方法を提供すること。
【解決手段】本発明にかかるモータ制御装置は、三線式単相誘導モータをインバータ制御するモータ制御装置であって、モータ15に変調電圧を供給するインバータ回路13と、モータ15の基準電圧端子51に対応する相の変調電圧を位相に応じて変化させて、インバータ回路の相間電圧を制御する制御部14とを有し、制御部14は、基準電圧端子51に対応する相を含む相間電圧が、前記三相インバータの最大出力電圧の1/2よりも大きくなるよう制御するものである。
(もっと読む)
電源システムの制御装置およびそれを搭載する車両
【課題】電源システムの制御装置において、部品追加を行なうことなく、コンバータのリアクトルを流れる電流を検出するための電流センサの異常を検出することによって、コンバータの信頼性を向上する。
【解決手段】電源システム20は、蓄電装置28と、リアクトルL1を有するコンバータ12と、リアクトルL1を流れる電流を検出するための電流センサ18とを含み、負荷装置45に電源を供給する。そして、電源システム20の制御装置30は、電圧制御部210と、電流制御部220と、電流制御部220の制御出力に基づいてコンバータ12の駆動指令を生成する駆動指令生成部230と、電流制御部220の制御出力を変更するための変更量を生成する指令変更部260と、電流制御部220の制御出力が変更されている期間における、電流センサ18により検出された電流検出値に基づく電流変化量と、変更量に基づいて演算により求められた基準となる電流変化量との比較によって、電流センサ18の異常を検出するセンサ監視部280とを備える。
(もっと読む)
電動機駆動装置および冷凍空気調和装置
【課題】リカバリー特性が悪いスイッチング素子を有益に利用することができる高効率な電動機駆動装置を得る。
【解決手段】IGBT11、21、31及びIGBT11、21、31と並列に接続したダイオード12、22、32で構成した第1のスイッチ部と、MOSFET13、23、33とシャント抵抗16、26、36との直列接続素子部及び直列接続素子部と並列に接続した還流ダイオード15、25、35で構成した第2のスイッチ部とを直列接続にて構成された1以上のアーム5、6、7と、第1のスイッチ部及び第2のスイッチ部にスイッチング動作を行わせて電動機3への電力供給の制御を行う制御装置8とを備えるものである。
(もっと読む)
電力変換装置
【課題】永久磁石同期電動機の直流制動時に、過大な電流が流れることを防止し、安定した制動動作を行うこと。
【解決手段】電動機の回転数検出手段や外部ブレーキを必要とせず、高速回転時においても安定した制動力を得られ、低速回転時においても大きい制動力を得ることのできる停止方法で、電流が直流制動時、最大電流設定値を超えた場合にはPWM全相遮断及びゼロベクトル出力を繰り返し行い、電流が直流制動復帰電流設定値以下になった場合には再度直流制動を行う。
(もっと読む)
回転角検出装置の製造方法、回転角検出装置、モータ制御装置及び電動パワーステアリング装置
【課題】製造工程の煩雑化を招くことなく、全域に亘ってより高精度にモータの回転角を検出することができる回転角検出装置の製造方法を提供すること。
【解決手段】無負荷状態で回転するモータに生じた三相の誘起電圧値を座標変換することにより検出されるd軸電圧値及びq軸電圧値に基づいて、モータレゾルバにより検出される回転角θの全域に亘って設定された複数の検出点(θ1〜θn)におけるオフセット値(φ:α1〜αn)を演算する。そして、その各オフセット値を各検出点における補正値Δθとすることにより回転角θの全域に亘る補正データ35を生成し、メモリ33(の不揮発性記憶領域34)に記憶(書込)する。
(もっと読む)
電源制御装置
【課題】 接触器の故障しない場合に、故障と検知される誤認故障の防止を達成する。
【解決手段】 主回路入力用接触器補助接点14、放電用接触器補助接点15、負荷入切用接触器補助接点16の補助接点を閉じると、制御部13は外部電源と接続される。制御部13が外部電源と接続されると、主回路入力用電圧値、放電用電圧値、負荷入切用電圧値の電圧値を制御部13へ入力される。制御部13は、検知した該電圧値が所定値内にあるかどうかを判断する。該電圧値が所定値内であれば、該補助接点は正常に動作していると判断され、該電圧値が所定値外であれば、該補助接点は正常に動作していない、と判断される。
(もっと読む)
モータ駆動装置
【課題】モータの印加電圧値と実測電圧値とに基づいて異常の有無を判定する場合に、正常にもかかわらず異常と誤判定してしまうことのないモータ駆動装置を提供する。
【解決手段】異常を検出する異常検出手段6に、印加電圧値記憶部7と、補正電圧値生成部8とを設ける。印加電圧値記憶部7は、電流検出部3での電流検出タイミングごとの各相の印加電圧値を記憶する。補正電圧値生成部8は、印加電圧値記憶部7に記憶されている印加電圧値と、電流検出部3における電流検出周期と、電流検出が行われてからモータ1に電圧が印加されるまでに要する時間とを用いて、印加電圧値を補正した補正電圧値を求める。異常判定部10は、補正電圧値生成部8で得られた補正電圧値と、電流−電圧変換部9で得られた実測電圧値とを比較して異常を判定する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】埋込磁石形同期電動機を低速、重負荷時にも安定に運転する。
【解決手段】電動機1のd軸に対応する制御上の第1,第2の推定軸と各々の直交軸をγ1,δ1軸、γ2,δ2軸とし、電圧、電流をγ1,δ1軸及びγ2,δ2軸上でベクトルとしてとらえ、端子電圧を制御してγ1,δ1軸の電流検出値を指令値に一致させる電流調節器10a,10b等と、q軸インダクタンスLqに対応する制御上のq軸インダクタンス設定値Lq’、γ2,δ2軸の電流検出値及び電圧指令値から速度推定値及びγ2軸角度を演算する位置・速度推定器40と、γ2軸角度に含まれる速度推定誤差による外乱がほぼ零となるようにLq’を求める設定器32と、LqとLq’との偏差に起因するd軸とγ2軸との間の角度差を演算する角度差設定器33と、γ2軸角度から角度差を減算してγ1軸の角度を補正する減算器34と、を備える。
(もっと読む)
モータ駆動装置
【課題】単一の電流検出手段を用いた場合でも、すべての相について、上段スイッチング素子および下段スイッチング素子のON故障を検出することが可能なモータ駆動装置を提供する。
【解決手段】駆動手段101にPWM信号を出力する制御手段102は、上段回生時異常判定手段103と、下段回生時異常判定手段104とを有する。上段回生時異常判定手段103は、上段スイッチング素子Q1、Q3、Q5がすべてON状態である上段回生状態において、電流検出抵抗Rに電流が流れた場合に、下段スイッチング素子Q2、Q4、Q6の少なくとも1つがON故障したと判定する。下段回生時異常判定手段104は、下段スイッチング素子Q2、Q4、Q6がすべてON状態である下段回生状態において、電流検出抵抗Rに電流が流れた場合に、上段スイッチング素子Q1、Q3、Q5の少なくとも1つがON故障したと判定する。
(もっと読む)
電流検出方法と、それを利用したインバータ装置やコンバータ装置、並びに、かかる装置を備えたモータ駆動装置及び冷凍空調機器
【課題】過変調領域でも安定に運転できる電流検出方法、それを利用した、インバータ装置やコンバータ装置、更には、低コストのモータ駆動装置、冷凍空調機器を提供する。
【解決手段】交流モータと、交流モータを駆動するインバータと、インバータ直流側の母線電流もしくは各アーム電流を検出する電流検出手段と、検出された電流検出値を用いて交流モータを制御する制御手段を備えたモータ駆動装置において、電流検出手段から得た電流の過去検出値もしくは前記制御手段の電流指令値から交流モータ電流参考値を算出し、かつ、電流検出手段で交流モータ電流の1相分の電流のみしか検出できない場合には、1相分の電流検出値と電流参考値との誤差を算出し、当該誤差を用いて、検出できない相の交流モータ電流を推定する。
(もっと読む)
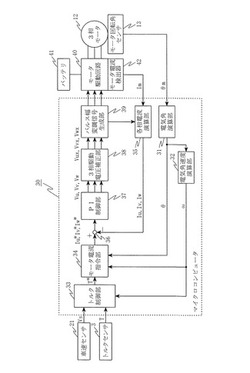
回転機の制御装置
【課題】モータジェネレータ10の電気角周波数よりも周波数の高い高周波電圧をインバータ50の出力電圧に重畳することで電気角θを推定するに際し、高周波電圧の重畳によって騒音が生じること。
【解決手段】電流制御器34では、モータジェネレータ10を流れる電流のdq軸成分である実電流id,iqをそれぞれ指令電流idr,iqrにフィードバック制御すべく指令電圧vdr,vqrを算出する。これらがαβ変換部36によって変換された指令電圧vαr、vβrのそれぞれに、加算部38,40において、高周波電圧生成部66の高周波電圧vhα、vhβが加算される。加算部38,40の出力する電圧ベクトルのノルムに基づき、電源電圧変更器70によって、コンバータ54の出力電圧が制御量の制御性の低下を生じない範囲で極力小さい値に設定される。
(もっと読む)
161 - 180 / 1,210
[ Back to top ]