
Fターム[5H505JJ24]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | 比例積分回路 (515)
Fターム[5H505JJ24]に分類される特許
201 - 220 / 515
モータ制御装置

【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度からモータ電圧指令制限値を算出するモータ電圧指令制限値算出手段13と、モータ電圧指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
電動機駆動装置の制御装置

【課題】動作点範囲が大きくなり得る交流電動機を制御するのに好適な電動機駆動装置の制御装置を提供する。
【解決手段】電流制御部と、電圧制御部と、電流制御周期Piを交流電動機の目標トルクTMに基づいて決定する電流制御周期決定部と、電圧制御周期Pvを交流電動機の回転速度ωに基づいて決定する電圧制御周期決定部と、電流制御周期決定部及び電圧制御周期決定部の決定に基づいて、電流制御周期Pi及び電圧制御周期Pvを設定する制御周期設定部と、を備え、電流制御周期決定部は、目標トルクTMが小さくなるに従って連続的又は段階的に長くなる値を、目標トルクTMに応じて電流制御周期Piとして決定し、電圧制御周期決定部は、回転速度ωが低くなるに従って連続的又は段階的に長くなる値を、回転速度ωに応じて電圧制御周期Pvとして決定する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】ロータ回転角の推定で戻し処理が行われるがロータが反転しない場合や停止する場合等にもロータ回転角を正確に推定できるモータ制御装置を提供する。
【解決手段】ロータ回転角の離散的な検出結果とそれから得られる角速度推定値ωeとトルク情報とに基づき次のように回転角推定値θreを求める。電動パワーステアリング装置にてモータのロータ回転角の次の検出前に回転角推定値θreが検出予定回転角θnxに達すると、直前検出時点tn-1及び検出予定回転角到達時点tnの操舵トルクτ(n-1),τ(n)と角速度推定値ωeとに基づき回転方向の反転/非反転を推定する。その後、回転角推定値θreが検出済回転角θrに向かうものとし、上記推定結果が非反転の場合にはΔτ(n)=|τ(n)−τ(n-1)|に比例した角度量Δθだけ変化した時点tn+1以降で、反転の場合には30度(検出間隔の1/2)だけ変化した時点tn+1以降で、回転角推定値θreを一定に維持する。
(もっと読む)
車両のモータ制御装置
【課題】車両に搭載された交流モータに流れる電流を検出する2つの電流センサのゲイン誤差の比を精度良く算出して、2つの電流センサのゲイン誤差の不均衡を補正する。
【解決手段】交流モータ17の停止中に、トルク発生に寄与しない無効電流を交流モータ17に流すように設定した電流指令値Id ,Iq と、V相及びW相の電流センサ38,39の出力に基づいた電流検出値ids,iqsとの偏差が小さくなるように交流モータ17の通電をF/B(フィードバック)制御する無効電流F/B制御を実行して、この無効電流F/B制御の実行中に、V相及びW相の実電流iv ,iw を推定し、その実電流推定値の比(iv /iw )と、電流センサ38,39の出力の比(ivs/iws)とに基づいて電流センサ38,39のゲイン誤差の比(kv /kw )を算出する。このゲイン誤差の比を用いて電流センサ38,39の一方の出力を補正してゲイン誤差の不均衡を補正する。
(もっと読む)
動力発生装置
【課題】トルク変化時に、ピーク電流を低減しながら磁束を増加させ、高効率の運転を実現すること。
【解決手段】誘導電動機30と、誘導電動機30に電流を供給するインバータ回路31を有し、インバータ回路31はトルクの絶対値を増加させる前に、誘導電動機30のスベリ周波数をほぼ零として入力電流を増加させる期間を有する動力発生装置とすることにより、必要となる磁束の増加を優先的かつ自動的に得ることができ、簡単な構成でありながら、過大電流も防ぎ、効率も高くできる。
(もっと読む)
洗濯乾燥機
【課題】誘導電動機の駆動条件をより的確に規定し、特に乾燥時の必要トルクを確保し、誘導電動機への電流を抑えること。
【解決手段】洗濯および乾燥される衣類30を収納するドラム31と、ドラム31を回転させる誘導電動機33と、誘導電動機33に電力を供給するインバータ回路34と、ドラム31内に乾燥用の空気を加熱する加熱手段35を有し、洗濯時にはインバータ回路34は誘導電動機33を駆動し、乾燥時にはインバータ回路34が誘導電動機33を駆動するとともに加熱手段35が動作し、インバータ回路34は、洗濯時と乾燥時に同等のスベリ周波数の電力を誘導電動機33に供給することにより、誘導電動機33への電流を抑え、効率も高めつつ駆動できる。
(もっと読む)
一体形調節器を有する電気モータの駆動インバータ
本発明は、駆動インバータに関し、この駆動インバータは、電気モータ(6)の相に結合されるべき端子盤(4)に電流を供給する交流電流発生器(3)と、電力ライン(20)と、電気モータに電力供給する相のうちの幾つかに設けられた交流電流センサ(41,42)と、電力ラインに設けられた電流センサ(21)と、電流源からの限界電流の少なくとも1つの値及び所要のトルク指針を含む情報を受け取る入力(52)と、トルク指針に基づいて電気モータの相電流を駆動する一方で、電流源からの限界電流に基づいて電力ラインの電流を許容値に維持するコントローラと、を有する。したがって、電流源を損傷させる恐れなく、最大電流を常時、電流源に課すことができる。 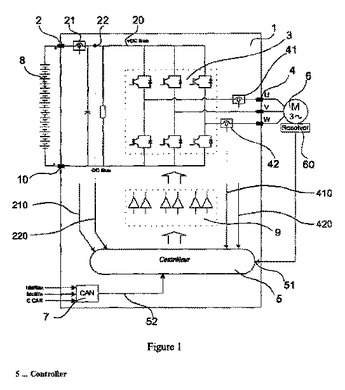 (もっと読む)
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】加算角補正部25は、モータ推定温度が第1の所定温度以上となると、インターバル時間毎に、加算角リミッタ24から出力される加算角αの絶対値を一時的に低減させる。また、加算角補正部25は、インターバル時間を、モータ推定温度が高いほど短くする。そして、インターバル時間が所定のしきい値以下になると、すなわち、モータ推定温度が第1の所定温度より高い第2の所定温度以上となると、加算角補正部25は、指示電流値変更部31に電流停止指令を通知する。これにより、γ軸指示電流値Iγ*が零にされ、操舵モードがマニュアルステアモードとなる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサの故障時に、回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部40は、レゾルバ8の出力信号の異常を検出すると、第2モードから、第1モードに、モータ制御モードを切り換える。制御モードが第1モードに切り換えられると、レゾルバ8の故障直前のq軸指示電流Iq*が負の値であるか否かが判別される。レゾルバ故障前のq軸指示電流Iq*が零または正の値である場合には、バッファ部28内に保存されているレゾルバ故障直前のロータ回転角θEが、制御角θCの前回値θC(n-1)の切換初期値として設定される。一方、レゾルバ故障前のq軸指示電流Iq*が負の値である場合には、バッファ部28内に保存されているレゾルバ故障直前のロータ回転角θEを、180°ずらした値(θE+π)が、制御角θCの前回値θC(n-1)の切換初期値として設定される。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】誘起電圧二乗和演算部37は、誘起電圧推定部28によって求められる推定誘起電圧の二乗和を求める。指示電流値生成部31は、検出操舵トルクTに基づいてγ軸指示電流値Iγ*を求めるとともに、誘起電圧二乗和Σに基づいてγ軸指示電流値Iγ*を求め、両者のうちの小さい方を、最終的なγ軸指示電流値Iγ*として設定する。誘起電圧二乗和Σが所定値D1以下のときには、γ軸指示電流値Iγ*は、小さな値ILに設定される。一方、誘起電圧二乗和Σが所定値D1より大きな所定値D2以上のときには、ILより大きな値IUに設定される。そして、誘起電圧二乗和Σが所定値D1から所定値D2までの範囲では、γ軸指示電流値Iγ*は、所定値ILから所定値IUまで滑らかに変化する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】トルクセンサ1によって検出され、操舵トルクリミッタ20によって制限処理を受けた検出操舵トルクTLを補正するための検出操舵トルク補正部40が備えられている。検出操舵トルク補正部40は、検出操舵トルクTLの絶対値|TL|が所定値a以下であるとき(|TL|≦a)には、検出操舵トルクTLを0に補正する。そして、検出操舵トルク補正部40は、検出操舵トルクTLの絶対値|TL|が所定値aより大きいとき(|TL|>a)には、検出操舵トルクTLをそのまま出力する。PI制御部23は、検出操舵トルク補正部40によって補正された検出操舵トルクTと指示操舵トルクT*との偏差に基づいて、加算角αを演算する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置およびそれを備えた車両用操舵装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTを指示操舵トルクT*に近づけるように、PI制御部23によって、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。ゲイン変更部40は、PI制御部23の比例ゲインKPを、γ軸指示電流値Iγ*が大きいほど小さくなる特性に従って可変設定する。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】回転角推定部29によって演算されるロータ50の推定回転角θEと、舵角センサ4によって検出されるステアリングホイール10の検出操舵角θSとに基づいて推定操舵トルクTEを演算する操舵トルク推定部64が備えられている。センサ故障検出部61によってトルクセンサ1の故障が検出されていない場合には、指示操舵トルク設定部21によって設定される指示操舵トルクT*と、トルクセンサ1から出力され、操舵トルクリミッタ20による制限処理を受けた検出操舵トルクTSとの偏差に応じて加算角αが演算される。一方、トルクセンサ1の故障が検出されている場合には、指示操舵トルクT*と、操舵トルク推定部64によって演算される推定操舵トルクTEとの偏差に応じて加算角αが演算される。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】モータ制御停止・再開タイミング検出部41は、モータ制御を停止させるべきタイミングと、モータ制御停止後においてモータ制御を再開させるべきタイミングとを検出する。モータ制御停止処理部43は、モータ制御停止・再開タイミング検出部41によってモータ制御停止タイミングが検出されたときに、制限値ωmaxを0まで漸減させた後に、指示電流値Iγ*を所定値以下となるまで漸減させる。モータ制御再開処理部44は、モータ制御停止・再開タイミング検出部41によってモータ制御再開タイミングが検出されたときに、制限値ωmaxを0に固定した状態で、指示電流値Iγ*を所定値以上となるまで漸増させた後に、制限値ωmaxを所定値以上となるまで漸増させる。
(もっと読む)
モータ制御装置および車両用操舵装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。速度推定オブザーバ43は、演算周期毎にロータ角速度ωn(演算周期当たりのロータ角変位に相当する)を求める。ロータ角速度補正部42は、指示電流値Iγδ*が急変した場合には、所要期間、指示電流値の急変直前に速度推定用オブザーバ43によって演算されていたロータ角速度と、指示電流値の急変後に速度推定用オブザーバ43によって演算されるロータ角速度とに基づいて、最終的なロータ角速度ωFを演算する。
(もっと読む)
電動機の制御装置
【課題】高応答な電流制御を行う電動機の制御装置を提供する。
【解決手段】IP制御のKpおよびKiは、埋込磁石同期モータに流れる電流の目標値であるIrefと埋込磁石同期モータに流れる電流であるIdetとの比を伝達関数により表したIdet/Iref=Ki/{L*s2+(Kp+R)*s+Ki}(ただし、Lは埋込磁石同期モータのインダクタンス、Rは埋込磁石同期モータの電機子巻線抵抗)に基づいて決定され、IP制御にFFを付加した2自由度の制御にて、埋込磁石同期モータに流れる電流の目標値であるIref′と埋込磁石同期モータに流れる電流であるIdet′との比であるIdet′/Iref′=(Ki+FF*s)/{L*s2+(Kp+R)*s+Ki}を用いて算出されるステップ指令に対する定常偏差に最終値の定理を適用し、ステップ指令に対する定常偏差をゼロにするFFを求める。
(もっと読む)
交流電動機の制御装置
【課題】同期PWMおよび非同期PWMを選択的に適用するPWM制御において、両者の選択条件を適切に設定することによって、円滑な交流電動機制御を実現する。
【解決手段】制御装置は、相電圧指令と搬送波との電圧比較結果に基づいてインバータから交流電動機に印加されるパルス幅変調電圧を制御することによって、交流電動機の出力を制御する。制御装置は、交流電動機の回転速度が変動している場合(S210にてYES)、搬送波が極大となる時の相電圧指令の実位相Pと目標位相Ptgtとの位相差ΔPを算出する(S220〜S250)。制御装置は、位相差ΔPの絶対値がしきい値よりも小さい場合(S260にてYES)、同期PWMを選択し(S270)、位相差ΔPの絶対値がしきい値よりも大きい場合(S260にてNO)、非同期PWMを選択する(S280)。
(もっと読む)
交流電動機の制御装置
【課題】直流電源電圧の低下等により電動機への印加電圧(インバータの出力電圧)が飽和した場合にあっても、電流制御から電圧制御へ制御を滑らかに切り換えて十分なトルクを確保することができる、交流電動機の制御装置を提供する。
【解決手段】本制御装置は、d,q軸電流検出値から電流振幅検出値を演算し、電流振幅指令値と該電流振幅検出値とに基づいてフィードバック制御後電流振幅指令値を演算し、位相指令値と該フィードバック制御後電流振幅指令値とに基づいてd,q軸電流指令値を演算しと、該交流電動機への印加電圧が飽和しているか否かを判定し、飽和していないときd,q軸積分項を演算する一方、飽和しているときd,q軸積分項を徐々に零に収束させる演算を行い、該d,q軸電流指令値と該d,q軸電流検出値と該d,q軸積分項とに基づいてd,q軸電圧指令値を決定する構成を具備する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】埋込磁石形同期電動機を低速、重負荷時においても安定に運転可能な制御装置を提供する。
【解決手段】磁極位置検出器を持たない永久磁石形同期電動機1の回転子のN極方向をd軸、d軸から90°進み方向をq軸、前記d,q軸に対応する制御上の推定軸をγ,δ軸とそれぞれ定義し、電動機1の電圧、電流をγ,δ軸上でベクトルとしてとらえ、電動機1のq軸インダクタンスに対応する制御上のq軸インダクタンス設定値とγ,δ軸の電流検出値及び電圧指令値とから、電動機1の速度及びγ軸の角度を推定するための磁束オブザーバ26、角度速度推定器23、速度推定器23、磁極位置演算器24を有し、更に、γ軸の角度に含まれる速度推定値と実速度との間の速度推定誤差に起因した外乱が零または零近傍となるように、q軸インダクタンスを設定するq軸インダクタンス設定器27を備える。
(もっと読む)
回転機の制御装置
【課題】モータジェネレータ10を流れる電流の高調波成分を検出することによって電気角θを推定するに際し、制御量の制御との干渉が生じるおそれがあること。
【解決手段】高調波電流検出部40では、ゼロベクトル期間においてモータジェネレータ10を流れる電流の高調波成分を抽出する。目標高調波電流生成部42では、基本波電流に基づき、目標高調波電流を算出する。偏差算出部44,46では、目標高調波電流と実際の高調波電流との差のγ成分とδ成分とをそれぞれ算出する。直交方向ベクトル生成部48では、基本波電流と逆位相の位相角φを用いた直交方向ベクトル(cosφ、−siφ)を算出する。外積演算部50では、直交方向ベクトルと偏差算出部44,46で算出された誤差ベクトルとの外積を算出する。位置推定器52では、外積をゼロとすべく電気角θを推定する。
(もっと読む)
201 - 220 / 515
[ Back to top ]