
Fターム[5H505JJ24]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | 比例積分回路 (515)
Fターム[5H505JJ24]に分類される特許
141 - 160 / 515
交流電動機の制御装置および制御方法
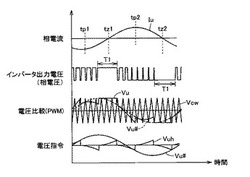
【課題】インバータを用いた交流電動機制御において、効率を低下させることなくインバータのスイッチングによるサージ電圧を抑制する。
【解決手段】交流制御指令(Vu)とキャリア信号(Vcw)との電圧比較に基づいて、インバータ各相のスイッチング素子のオンオフが制御される。交流制御指令(Vu)は、三相変調のための本来の交流電圧指令(Vu♯)に、3次高調波電圧(Vuh)を重畳することによって得られる。3次高調波電圧(Vuh)は、相電流の特定タイミング(tp1、tp2)を含む所定の電流位相期間(T1)において、当該相でのスイッチング素子のオンオフが固定されるように設定される。
(もっと読む)
電動機の速度制御装置及び速度制御方法

【課題】目標値応答と外乱応答を個別に最適化可能な電動機の速度制御装置を提供する。
【解決手段】速度制御手段を、速度指令と速度帰還の偏差に積分ゲインGIを乗算して積分する積分増幅器221と、速度指令を共通の入力とし、比例ゲインGF1を有する不完全微分器の出力及び比例ゲインGF2を有する1次遅れ演算器の出力を加算して出力するフィードフォワード補償器224と、積分増幅器221の出力から速度帰還を減算すると共に、フィードフォワード補償器224の出力を加算する加減算器222と、この出力にゲイン調整パラメータGPを乗算してトルク指令を得る比例増幅器223とで構成する。速度指令応答時定数をτr、トルク外乱応答時定数をτd、電動機を含む負荷慣性モーメントをJとしたとき、G1=1/τd、GP=σr×J、GF1=1/(σr×τr)、GF2=1−τr/τdを満たすようにする。
(もっと読む)
回転電機制御装置
【課題】複数のバッテリセルが直列接続されたバッテリ群のコンディションに応じて適切に3レベルインバータを制御し、効率良く回転電機を制御する。
【解決手段】3レベルインバータ60は、正極電圧Pと負極電圧Nと正負両極間電圧が分圧された中間点電圧Mとの3レベルの電圧を交流出力電圧Vu,Vv,Vwとして出力可能であり、中間スイッチSmは、上段バッテリ31及び下段バッテリ32が直列接続されたバッテリ群33の中間接続点と正負両極間電圧の分圧点との電気的接続を開閉可能であり、回転電機制御装置10は、バッテリ群33の少なくとも温度に基づいてバッテリ群33の暖機が必要と判定した場合に、中間スイッチSmを閉じ、上段バッテリ31及び下段バッテリ32をそれぞれ流れる電流値が所定の切替周期以上で交互に偏重されるアンバランスモードで3レベルインバータ60をスイッチング制御する。
(もっと読む)
交流回転機の制御装置
【課題】位置制御応答を高く保つことが出来るとともに、低速域から高速域までスムーズに交流回転機を駆動する交流回転機の制御装置を得る。
【解決手段】電圧指令に基づいて交流回転機1に電圧を印加する電圧印加手段3と、交流回転機1に流れる検出電流ベクトルを検出する電流検出手段2と、検出電流ベクトルから交流回転機1のインダクタンスに依存する信号を抽出して交流回転機1の回転子の検出位置を演算する位置検出手段4と、電圧指令と検出電流ベクトルと検出位置とに基づいて交流回転機1の回転子の推定位置および交流回転機1の推定速度を演算する推定手段5と、検出位置と外部から与えられる位置指令との偏差に基づいて速度指令を演算し、速度指令と推定速度との偏差に基づいて電圧指令ベクトルを生成するとともに、電圧指令ベクトルを推定位置に基づいて電圧指令に変換する制御手段6とを備える。
(もっと読む)
交流回転機の制御装置
【課題】制御位相を切換える前に負荷が変動しても、切換え中の制御電流ベクトル指令や制御位相が不連続にならず、交流回転機をスムーズに駆動することができる交流回転機の制御装置を得る。
【解決手段】交流回転機1の回転子位置の推定値である推定位相と、交流回転機1の回転速度の推定値である推定速度とを出力する推定手段4と、任意の制御位相上での制御電流ベクトル指令を生成し、回転機電流を制御位相上へ変換した制御電流ベクトルが制御電流ベクトル指令に一致するように電圧指令値を出力する制御手段5とを備え、制御手段5は、外部より入力する速度指令と推定速度とが一致するようして得た実電流指令ベクトルと、制御位相と、推定位相と、予め設定された電流ベクトル設定値とに基づいて制御電流ベクトル指令を生成するとともに、任意に設定した同期位相と推定位相とを相互に切換えて制御位相とする。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの異音の発生することがなく、且つ操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、電流指令値が負値からゼロクロス近傍の所定範囲に属する値になった場合には、正値の前記デッドタイム補償量を各相DUTY指令値に加算し、電流指令値が正値からゼロクロス近傍の所定範囲に属する値になった場合には、負値の前記デッドタイム補償量を各相DUTY指令値に加算する。
(もっと読む)
回転機の制御装置
【課題】コンデンサとインバータとの間の電気経路を開閉するリレーが開状態とされる状況下、モータジェネレータの通電制御によってコンデンサの充電電圧を規定電圧以下に放電する際、モータジェネレータが回転し続けることを防止する。
【解決手段】指令電流設定部30によって設定される指令電流idr,iqrは、固定座標変換部50によってαβ座標系に変換された後、β成分の符号が反転され、回転座標変換部54によってdq座標系に変換される。これにより、dq変換部54の出力は、指令電流設定部30によって設定される指令電流idr,iqrをα軸に対して線対称変換したものとなる。放電制御に際しては、対称変換された指令電流にフィードバック制御される。
(もっと読む)
電力変換装置
【課題】回転位置を検出するセンサを回転電動機の軸に取り付けることなく同期整流を実現するとともに、誘起相電圧の周期と各相の検出順序が正しいかどうかのチェックにかかる負荷を低減させること。
【解決手段】同期検出PLL部13は、ダイオードオン統合信号S12に基づいて同期制御されたオン側同期信号S13を生成するとともに、ダイオードオフ統合信号S12´に基づいて同期制御されたオフ側同期信号S13´を生成し、ステータゲート指令生成PWM部15は、オン側同期信号S13およびオフ側同期信号S13´に基づいて、スイッチング素子のスイッチング制御を行わせるゲート指令信号S16を生成する。
(もっと読む)
同一負荷パターンを有する装置の省電力駆動装置及び方法
【課題】DC−DCコンバータの出力電圧、配線の電気的特性、電磁ノイズ除去用素子の有無、モータごとの損失特性及び温度変化、等を予め実験して損失特性のデータを取得することなく、すべての構成要素の損失特性を考慮して損失量を最小化することができる同一負荷パターンを有する装置の省電力駆動装置及び方法を提供する。
【解決手段】バッテリ91で駆動されるDC−DCコンバータ93と、インバータ19とを備え、インバータから電力供給されるモータ21で駆動され、同一負荷パターンで繰り返し運転される同一負荷パターン装置23の省電力駆動装置。同一負荷パターンにおけるバッテリからの受電電力量Wを計算する電力量演算器81と、インバータのパラメタ(搬送波周波数指令値Fと出力電圧指令値G)を複数の値に変化させ、各パラメタにおける受電電力量を比較し、受電電力量を最小にするパラメタ選択・指令器83とを備える。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】実回転角に基づく回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することが可能なモータ制御装置を提供すること。
【解決手段】通電不良検出部は、誘起電圧二乗和Esq_αβが、所定の閾値E1を超えるか否かを判定する(ステップ602)。また、モータ回転角速度推定値ωm_eが所定の閾値ω1よりも低いか否かを判定する(ステップ603)。そして、その誘起電圧二乗和Esq_αβが最高速回転状態に対応する最大領域にあるにもかかわらず(Esq_αβ>E1、ステップ602:YES)、モータ回転角速度推定値ωm_eは非回転状態を示す最小領域にある(ωm_e<ω1、ステップ603:YES)という矛盾を検知した場合に、何れかの相に通電不良の発生を示す異常があると判定する(ステップ604)。
(もっと読む)
モータ制御装置、圧縮機およびヒートポンプ装置
【課題】実際の負荷トルクの変動態様に一致するように、トルク変動を補償することができるモータ制御装置を提供する。
【解決手段】速度制御部23は、モータ4の回転速度が外部より与えられる速度指令ωrefに一致するようにd軸電流指令値Idref,q軸電流指令値Iqrefを出力し、電流制御部21は、d軸電流Id,前記q軸電流Iqが上記各指令に一致するようd軸電圧指令Vd,q軸電圧指令値Vqを出力する。補正部24は、基準負荷トルク平均値T_aveと平均q軸電流指令値Iq_aveとの比率αを基準負荷トルクTに乗算し、その乗算した値からq軸電流指令値Iqrefを減算した値にゲインを乗じた値をq軸電流補正値Iq_corとしてq軸電流指令値Iqrefに重畳する。
(もっと読む)
同期電動機の制御装置
【課題】電力変換回路の過電流保護と遮断回避を図るとともに、同期電動機に負荷外乱などに起因した不要電流が流れることを抑制した電動機の制御装置を提供する。
【解決手段】電力変換回路4から同期電動機SMに供給される一次相電流を電流検出器9,10で検出し、その検出値から電流成分演算回路7で電流成分を演算する。一方、周波数補正演算回路8で電流設定回路5で設定された電流設定値および電流成分演算回路7で演算された電流成分から周波数補正量を求め、加減速動作時には電流設定値の電流を流し、加減速動作の無いときには電流を抑制するようにする。そして、電圧指令演算回路3で一次周波数指令値から周波数補正量を減算して得られる一次周波数に基づいて一次電圧指令値を演算して電力変換回路4に出力する。
(もっと読む)
回転電気機械のトルクリプル抑制制御装置および制御方法
【課題】トルク脈動抽出フィルタのフィルタ次数を高くした場合にも、学習制御パラメータを自動調整して所望の抑制効果を得ることができる。
【解決手段】実システム33のトルク検出値Tdetに含まれるトルク脈動成分をトルクリプル抽出部34を通してn次複素フーリエ係数TAn、TBnの形で検出し、I−P制御部31により複素フーリエ係数TAn、TBnを0に抑制するように制御パラメータKp,kiを自動調整し、非干渉化部32で求めるn次補償電流IAn*,IBn*を使って回転電気機械のトルクリプルを抑制する手法において、トルク脈動抽出フィルタGFは高次ローパスフィルタとし、学習制御は、学習制御で求めるn次補償電流IAn*,IBn*のうち回転電気機械の応答を支配する低次の極のみをマッチングさせる部分的モデルマッチング手法で制御パラメータを自動調整する。
(もっと読む)
モータ制御装置
【課題】ブラシレスモータのロータの回転角を検出するために用いられる2つの正弦波信号のうちのいずれか一方に異常が発生した場合においても、正常な方の正弦波信号に基づいて、ブラシレスモータを駆動することができるモータ制御装置を提供する。
【解決手段】第2の回転角演算部33は、2つの正弦波信号V1,V2のうちの一方に異常が発生した場合に、正常な正弦波信号から予測される第1の回転角候補および第2の回転角候補のうちの一方の回転角候補を、第2の回転角θ2として演算する。ゲイン演算部35は、第2の回転角演算部33によって演算された回転角θ2に基づいて、ブラシレスモータ3によって本来発生されるべきトルクと逆方向のトルクが発生されないように、指示電流値Idq*に乗算されるべき第2ゲインG2を演算する。
(もっと読む)
モータ制御装置
【課題】モータジェネレータの減磁と電流センサの異常とを識別する。
【解決手段】電流指令値Id*,Iq*と電流センサ125で検出された電流値Id,Iqとの偏差に応じて電圧指令値Vs,Vqを生成しMG2を駆動する。制御モード判定器140gは、Vqが所定のしきい値より低下したか否かを判定し、低下した場合にはさらにVqの挙動を監視し、Vqが定常的であればMG2の減磁であると識別し、振幅変動があれば電流センサ125の異常と識別する。
(もっと読む)
回転駆動装置及びこれを備えた撮像装置
【課題】長期の信頼性を確保すると共に低振動を実現し、さらに省スペース化を図る。
【解決手段】回転体に設けた第1の着磁部61との間に回転方向の磁力を生じさせて回転体を回転させる磁気回転駆動部64を、周方向に等間隔に配置すると共に、この磁気回転駆動部同士の間に画成される空間に、第1の着磁部の磁気に基づいて回転体の径方向位置を検出する第1の磁気センサ65と、第2の着磁部62の磁気に基づいて回転体の軸方向位置を検出する第2の磁気センサ66と、第1の着磁部との間に径方向の磁力を生じさせて回転体の径方向位置を制御する第1の電磁石67と、第2の着磁部との間に軸方向の磁力を生じさせて回転体の軸方向位置を制御する第2の電磁石68と、を配置する。
(もっと読む)
操舵制御装置
【課題】歯車機構の噛み合わせにより生じる振動によって乗員に不快感を与えることを抑制できる操舵制御装置を提供する。
【解決手段】ハンドル角θhにおいてハンドルを操舵することによる歯車機構の振動により生じる振動トルクを取得する(S303、S306)。取得された振動トルクを差分トルクtmpとし(S304、S307)、EPSモータ電流指令値Icを差分トルクtmpに基づいて補正し、補正EPSモータ電流指令値Icaを算出する(S309)。これにより、歯車機構にて生じるガタや振動が入力軸を経由してハンドルへ伝達されるのを抑制することができ、運転者の不快感を低減することができる。また、歯車機構にて生じるガタや振動を、EPSモータの駆動制御により補正可能であるので、加工時の精度管理を緩和することができる。これにより、加工コストを低減することができる。
(もっと読む)
同期機の位置センサレス制御装置
【課題】多重巻線構成にした同期機の位置センサレス制御において、多重巻線からの電圧や電流情報にアンバランスが存在する場合にも各インバータの位相推定情報を1つに統合処理し、この統合処理に制御要素の共通化と制御情報の通信を簡略化できる。
【解決手段】二重巻線構成にした同期機の1つの巻線をマスターインバータで駆動し、残りの巻線をスレーブインバータで駆動し、両インバータは回転座標上の電圧指令と電流検出信号およびモータの回路定数と推定速度から推定位相角Δφ^e1およびΔφ^e2を演算し、平均値演算部20は推定位相角の平均値を求め、速度推定部12は平均値から推定速度ω^reを演算し、位置積分部13は推定速度を時間積分して推定基準位相θ^を演算する。
平均値演算は速度推定後に行う構成、または位置積分後に行う構成も含む。
(もっと読む)
モータ駆動装置及び電動車両
【課題】電圧可変形エネルギー貯蔵素子の蓄積エネルギーを浪費せずに省エネルギー化に寄与することができるモータ駆動装置及び電動車両を提供する。
【解決手段】モータM1に交流電力を供給するインバータINVと、その正負直流母線間に接続された第1の電源としての二次電池1と、モータM1の中性点と直流母線の正極または負極との間に接続された第2の電源としての電圧可変形エネルギー貯蔵素子2と、インバータ3を駆動する制御回路100と、を備え、エネルギー貯蔵素子2と正負直流母線との間でエネルギーを授受可能としたモータ駆動装置において、制御回路100は、加速時のモータトルクの大きさを判断する判断手段110と、その出力信号Ldetに基づき、モータM1の速度領域における弱め界磁範囲及び弱め磁束量を調整するためのモータ制御ブロック121、キャパシタエネルギー制御ブロック131と、を備える。
(もっと読む)
モータ駆動装置及びモータ駆動車両
【課題】トルク制御と速度制御の切り換えタイミングと、クラッチの接続/分離タイミングとの不一致の問題に対処するためのモータ制御技術を提供する。
【解決手段】モータ駆動装置が、上位トルク指令に応答して第1トルク指令を生成するトルク制御手段と、上位速度指令と3相モータのロータ回転数とに応答して第2トルク指令を生成する速度制御手段と、第1トルク指令と第2トルク指令のいずれかから選択された選択トルク指令に応答してインバータを制御するインバータ制御手段と、クラッチを接続状態と分離状態の間で切り替えるクラッチ制御手段とを備えている。選択トルク指令は、クラッチの切り替えに対応して第1トルク指令と第2トルク指令のいずれかから選択される。トルク制御手段は、ロータ回転数の絶対値が所定の速度制限値を超えた場合、第1トルク指令の絶対値が上位トルク指令の絶対値より小さくなるように第1トルク指令を生成する。
(もっと読む)
141 - 160 / 515
[ Back to top ]