
Fターム[5H505JJ24]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | 演算回路要素 (3,208) | 比例積分回路 (515)
Fターム[5H505JJ24]に分類される特許
61 - 80 / 515
電動機駆動システム
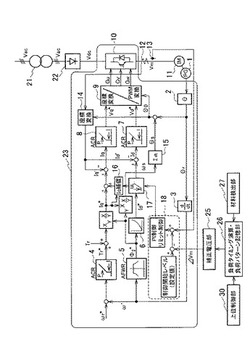
【課題】ダイオードコンバータを採用した際に、圧延機の噛み込み時に電動機に急激な負荷が加わる際の電動機一次電圧の飽和を避けることができるとともに、電圧飽和の影響によるインバータの制御不安定又はトリップを防ぐ。
【解決手段】電動機11と、インバータの直流電源であるダイオードコンバータ22と、インバータを用いて電動機11を可変速制御し、且つ界磁弱め制御を行う電動機制御装置23と、電動機制御装置23により出力される一次電圧を検出する一次電圧検出部13と、要求されるインバータの変調率の変動が予測される場合に、変動のタイミングと変動量とを検出する変調率変動検出部と、変調率変動検出部により検出された変調率の変動量に基づいて一次電圧の変動量を算出する補正電圧部25とを備え、電動機制御装置23は、変動のタイミングに合わせ、一次電圧とその変動量とに基づいて界磁弱め制御を行う際のd軸界磁電流抑制分を算出する。
(もっと読む)
モータ制御装置

【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータの回転角速度と所定のゲインマップに基づき、目標電流ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された目標電流ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
制御装置
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
モータ制御装置、及び、それを利用したモータの起動方法
【課題】レシプロ式圧縮機のような負荷トルクの変動が大きい圧縮機においても、安定して差圧起動を実現するモータ制御装置及びそれを利用したモータの起動方法を提供する。
【解決手段】d軸電流指令値Id*及びq軸電流指令値Iq*、更には、周波数指令値ω*に基づいてd軸電圧指令値Vd*及びq軸電圧指令値Vq*を出力することにより電力変換回路を制御し、ベクトル制御を用いたモータ制御装置における起動方法において、d軸検出電流Idc及びq軸検出電流Iqcと、d軸電圧指令値とq軸電圧指令値とから軸誤差Δθcを検出し、位置決め運転モードにより前記d軸電流指令値及びq軸電流指令値を出力し、同期運転モードにより、軸誤差検出手段により検出した軸誤差Δθcに基づいて、負荷トルク変動に適合したd軸電流指令値及びq軸電流指令値を出力し、位置フィードバック運転モードによりd軸電流指令値及びq軸電流指令値を出力する。
(もっと読む)
船舶用ハイブリッド式推進システム
【課題】船舶の通常航行時に外乱によって電気推進プロペラを駆動する推進装置用電動機の実回転速度が目標回転速度よりも高くなった場合でも、不要な回生制動の発生を防ぐ船舶用ハイブリッド式推進システムを提供する。
【解決手段】インバータ制御回路6Cに回転速度指令nsと実回転速度NRとの速度偏差の極性がプラスのとき推進装置用電動機7に力行動作を行わせ、速度偏差がマイナスのとき推進装置用電動機に回生動作を行わせるようにした船舶用ハイブリッド式推進システムにおいて、回転速度設定器10が推進装置用電動機に減速度または逆転操作の指令を出力しているときは、予め定めた回生トルク制限値となるゲート信号をインバータ主回路のスイッチング素子に出力し、回転速度設定器10が推進装置用電動機に増速度または一定速度の指令を出力しているときは、回生トルクがゼロとなるゲート信号をインバータ主回路6Pのスイッチング素子に出力する。
(もっと読む)
モータ制御装置
【課題】モータトルクの変動を緩慢にすることができ、操舵フィーリングを向上させることができるモータ制御装置を提供する。
【解決手段】速度指令値設定部21は、トルクセンサ1によって検出される操舵トルクThおよび車速センサ2によって検出される車速Vsに応じたモータトルク(アシストトルク)をモータ5から発生させるためのq軸電流指令値に対応したロータ回転速度を、速度指令値ω*として設定する。速度偏差演算部22は、速度指令値設定部21によって設定された速度指令値ω*と、速度演算部34によって演算されたロータ回転速度ωとの偏差(ω*−ω)を演算する。速度制御部23は、速度偏差演算部22によって演算された偏差(ω*−ω)に対して比例積分演算(PI演算)を行なうことによって、q軸電流指令値Iq*を演算する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータ電圧指令値とPI制御部によって演算されたPI演算値とから電圧指令値ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された電圧指令値ゲインまたはdq軸ゲインマップから求めた電流制限ゲインをdq軸目標電流に乗じて、モータのdq軸目標電流を制限する。
(もっと読む)
モータ制御装置
【課題】電圧指令値の制限を行っても応答性および追従性を低下させることなく、制御動作も安定なモータ制御装置を提供する。
【解決手段】PI演算値を演算するためのPI制御部と、モータの非干渉化制御のための非干渉化制御量を演算するための非干渉化制御量演算部と、PI制御手段により演算されたPI演算値と、非干渉化制御量演算部により演算された非干渉化制御量とを加算する加算部と、加算部の加算結果を制限し、制限した制御量をモータ電圧指令値として出力するリミッタと、モータ電圧指令値とPI制御部によって演算されたPI演算値とから電圧指令値ゲインを演算するゲイン演算部とを備え、ゲイン演算部によって演算された電圧指令値ゲインを電流補償制御を行う補償量に乗じて、モータの電流指令値を演算する。
(もっと読む)
モータ駆動制御装置とモータ駆動方法
【課題】三相モータを高速且つ高トルクで駆動可能とする。
【解決手段】三相モータ30の各相の電流から、マグネットトルク電流iqrとリラクタンストルク電流idrとを求めてフィードバック制御を行う。この際、回転角センサ109の測定した回転角θに、制御システムの遅れに相当する回転角を所定の角度deg分加算することにより、遅れ補償制御を行い、モータの応答性を高める。さらに、弱め磁束制御を行って、モータの応答性を高める。制御系の遅れは、無駄時間と一次遅れ系の時定数とで近似する。
(もっと読む)
電力変換装置、電動機駆動システム
【課題】回転子の回転状態を検出するためのセンサを用いずに電動機を制御する電動機の制御方法において、電動機が高トルク運転時でも電動機の運転を持続しつつ、回転子の回転状態を精度よく検出すると共に騒音の発生を抑制する。
【解決手段】電力変換装置50aにおいて、電圧出力手段3は、ベクトル演算手段4からの基本電圧指令値Vdc*、Vqc*に対して高周波の交番電圧を重畳し、三相交流電圧指令値Vu*、Vv*、Vw*を電力変換手段11へ出力する。電流成分分離手段5は、三相電流信号Iuc、Ivc、Iwcから交番電圧に応じた高周波電流成分を抽出し、その高周波電流成分の大きさを表す高周波電流ノルムIhを求める。重畳電圧振幅調整手段9は、電流成分分離手段5からの高周波電流ノルムIhに基づいて、交番電圧の振幅を調整するための重畳電圧振幅指令値Vh*を電圧出力手段3へ出力する。
(もっと読む)
交流電動機の制御装置
【課題】 運転状態によって電動機特性が大きく変動してもロバストで高効率な位置センサレス駆動を可能とする交流電動機の制御装置を提供する。
【解決手段】 トルク指令T*を制御位相θ∧を用いて分解し、交流電動機の機械出力に寄与する成分をδ軸電流指令、寄与しない成分をγ軸電流指令として出力する電流分配器3Aと、前記δ軸、γ軸電流指令とδ軸、γ軸電流検出のそれぞれが一致するように制御する電流制御器5と、前記電流制御器の出力と前記交流電動機のインダクタンスでの電圧降下量との加算量のγ軸成分がゼロとなる位相を算出し、前記制御位相θ∧として出力する位相推定器8と、を備える。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】非干渉制御の角速度フィードバックを原因とする低速且つ高いトルクの状態でもモータによる振動を低減できるモータ制御装置、モータ制御方法を提供することを目的としている。
【解決手段】電流指令値から、電圧指令値Vd*を生成し、モータに流れる検出電流によりフィードバック制御する制御装置において、モータに流れる電流を示す電流(Iq*)に、モータの角速度ωの上昇により増加する関数であるフィードバック制御系のゲインを乗じて電圧指令値Vd*に加算する非干渉制御部38を備える。
(もっと読む)
電力変換装置
【課題】電圧利用率の要求が低い領域を電圧利用率の要求が高い領域にして制御することで、制御性能を損なうことなく低損失化を達成できる電力変換装置を提供する。
【解決手段】電力変換装置において、指令トルクTcmd*(要求トルク)と回転数Nとに基づいて指令電圧振幅Vamp*(電圧振幅)を設定する電圧振幅設定手段52aと、偏差トルクΔTに基づいて指令電圧位相Vp*(電圧位相)を設定する電圧位相設定手段52eと、指令電圧振幅Vamp*と指令電圧位相Vp*とに基づいて正弦波領域であっても過変調領域になるよう昇圧する指令昇圧電圧Vconv*(昇圧指令信号)をコンバータ10に伝達する電圧指令設定手段51aとを有する。この構成によれば、電圧利用率の要求が低い領域を電圧利用率の要求が高い領域にして制御するので、全域で制御性能を損なうことなく低損失化を達成することができる。
(もっと読む)
モータ制御装置
【課題】電力計等の専用の測定機器を用いることなしに、正確に消費電力の計測を可能にする抵抗回生方式のモータ制御装置を得ること。
【解決手段】抵抗回生方式のモータ制御装置において、モータに流れる電流に基づき該モータに発生するトルクもしくは推力を算出するトルク・推力算出部と、前記モータに流れる電流とモータ速度との一方または両方に基づき損失Lを算出し、前記モータ速度と前記トルク・推力算出部が算出したトルクもしくは推力との積から出力Wを算出し、瞬時電力Pを、損失Lと出力Wとの和L+Wが、L+W≧0のときはP=L+Wと算出し、L+W<0のときはP=0と算出する電力算出部とを備えた。
(もっと読む)
電動パワーステアリング制御装置
【課題】車両状態又は操舵状態に応じて、操舵感を向上させることができる電動パワーステアリング制御装置を提供する。
【解決手段】操舵トルクτn、操舵速度ωnまたは車速に応じて、d軸のフィードバックゲインまたはd軸電圧を補正することによって、d軸の電流応答性を変化させ、ハンドルが動き過ぎることに対しては動きを抑制し、動き難いことに対しては動き易くする。
(もっと読む)
回転機の制御装置
【課題】低変調率領域と高変調率領域とで制御手法を切り替える場合、制御手法の切り替えに起因してインバータの出力に変動が生じやすいこと。
【解決手段】電流フィードバック制御の操作量としての指令電圧vdr,vqrに応じた指令振幅VPと、指令相電圧位相θu,θv,θwと、3相の指令電圧vur,vvvr,vwrとに基づき、PWM信号生成部34では、PWM信号gu,gv,gwを生成する。ここでは、「0〜π/2」の期間において、指令振幅VPに基づき、インバータIVの出力電圧が直流電圧源の負極電圧となる期間を指定し、正極電圧となる期間は、上記負極電圧となる期間と正極電圧となる期間との一対の期間の平均電圧を指令電圧vur,vvr,vwrに近似させるように設定する。
(もっと読む)
同期機制御装置
【課題】トルクと磁束とを独立して操作できるような電流制御系の構成するとともに、高速駆動時のような同期機の電気角周波数(回転速度)に対する電力変換手段のキャリア周波数の比が小さく、電流フィードバック制御が困難となる条件下においても、電機子鎖交磁束に基づいたトルク指令生成とトルク指令への追従性の向上を図る。
【解決手段】 同期機1の運転条件に応じて、磁束指令生成器5から出力される磁束指令と磁束演算器6から出力される推定電機子鎖交磁束とを切り換えて電機子鎖交磁束を出力するとともに、第2の電圧指令生成器32の出力の有効無効を切り換える信号を出力する磁束設定器8と、磁束指令と推定電機子鎖交磁束との差分に基づいて磁化電流指令を生成する磁化電流指令生成器9とを備えている。
(もっと読む)
交流回転機の制御装置
【課題】速度制御系の機械的応答で制約されていたトルクの応答性を改善できる交流回転機の制御装置を提供する。
【解決手段】交流回転機2へ交流電圧を出力する電力変換手段3と、交流回転機2に流れる電流を検出する電流検出手段4と、検出電流を回転二軸座標上の電流へ変換する電流演算手段5と、回転二軸座標上の電流に基づいて交流回転機2が出力する出力トルクを演算するトルク演算手段8と、トルク指令と出力トルクとの偏差に基づいて周波数指令を演算する周波数指令演算手段9と、周波数指令を補正する周波数補償量をトルク指令に基づいて演算する補償器10と、補正後の周波数指令に基づいて回転二軸座標上に設定した制御座標軸の位相を演算する位相演算手段6と、補正後の周波数指令と制御座標軸の位相とに基づいて電力変換手段に出力する電圧指令を演算する電圧指令演算手段7を備える。
(もっと読む)
交流電動機の制御装置
【課題】変換器のサイリスタが失弧しても、トルク脈動を発生させることなく装置を停止させることが可能な交流電動機の制御装置を提供する。
【解決手段】第1の変換器1と、第2の変換器2と、位置検出手段4と、速度検出手段5と、電流検出手段6と、速度検出手段5の速度帰還が速度指令となるように制御して電流指令を出力する速度制御器72と、電流検出手段6の電流帰還が電流指令となるように第1の変換器1の制御角指令αを出力する電流制御器73と、位置検出手段4の検出位相に応じて第2の変換器2の位相を制御する位相制御器79と、失弧検出手段9とで構成する。失弧検出手段9は、αが第1の所定値以下となり、且つ、電流指令から電流帰還を減算した偏差に第1の定数を乗じて遅延手段によって遅延させた信号から、電流指令に第2の定数を乗じた値を減算した値が第2の所定値以上となったとき、失弧発生とみなす。
(もっと読む)
インバータ制御装置
【課題】モータの高速化および多極化に対する厳しい要求に対してもインバータ制御を追従させることのできるインバータ制御装置を提供することを目的とする。
【解決手段】基準キャリア周波数の1周期間隔で第1処理を実行するとともに、基準キャリア周波数をm(mは2以上の整数)倍した高周波キャリア信号の1周期間隔で第2処理を実行することにより、高周波キャリア信号の1周期間隔でPWMデューティを更新する。第1処理においては、モータ電流の計測値に基づいて2相電圧指令値および電気角を算出する。第2処理は、第1処理で算出された電気角に、第1処理からの時間に基づいて求められる角度シフト量を加算することで本処理の電気角を算出し、算出した該電気角を用いて第1処理で求められた2相電圧指令値を2相/3相変換して3相電圧指令値を算出し、PWMパルス信号のデューティを算出する。
(もっと読む)
61 - 80 / 515
[ Back to top ]